


At gå med kaffe er en lidt forstået bedrift af fysik
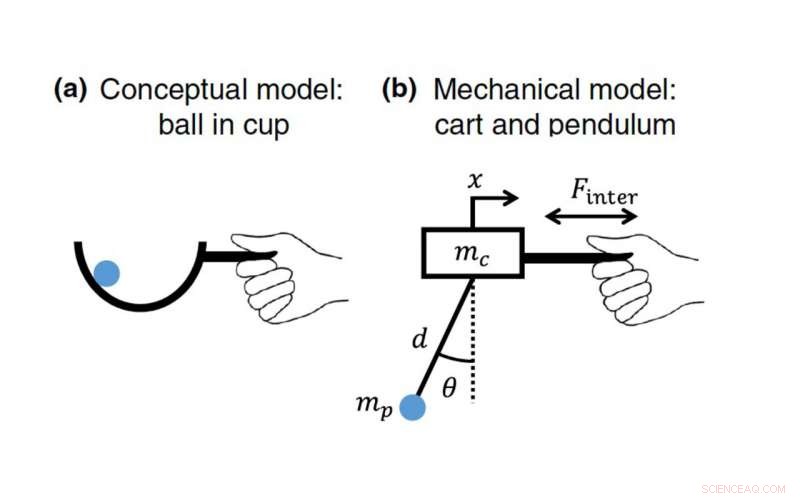
En skematisk illustration af vogn-pendulsystemet til at simulere menneskets håndtering af et komplekst objekt, såsom en kop varm kaffe:(a) en konceptuel model af en kugle, der ruller inde i en cirkulær kop og (b) en ikke-lineær mekanisk model af et pendul, der er fastgjort til en kørende vogn, som er matematisk beskrevet af et sæt differentialligninger. Kredit:Brent Wallace, Ying-Cheng Lai, Arizona State University
At gå med kaffe er noget, de fleste af os gør hver dag uden at tænke over den balancegang, det kræver. Faktisk, der er en masse fysik, der forhindrer kaffen i at vælte.
Kaffen, en termisk omrørt væske indeholdt i en kop, har indre frihedsgrader, der interagerer med koppen, som, på tur, interagerer med den menneskelige bærer.
"Mens mennesker besidder en naturlig, eller begavet, evne til at interagere med komplekse objekter, vores forståelse af disse interaktioner - især på et kvantitativt niveau, er ved siden af nul, " sagde ASU professor Ying-Cheng Lai, en professor i elektroteknik ved Arizona State University. "Vi har ingen bevidst evne til at analysere indflydelsen af eksterne faktorer, som støj eller klima, på vores interaktioner."
Endnu, forståelse af disse eksterne faktorer er et grundlæggende problem inden for anvendte områder såsom blød robotteknologi.
"For eksempel, i design af smarte proteser, det bliver stadig vigtigere at indbygge naturlige fleksibilitetsformer, der efterligner den naturlige bevægelse af menneskelige lemmer, " sagde Brent Wallace, en tidligere bachelorstuderende hos Lai og nu doktorand ved ASU's Ira A. Fulton Schools of Engineering. "Sådanne forbedringer gør, at protesen føles mere behagelig og naturlig for brugeren."
Ifølge Lai, det er tænkeligt, i en ikke alt for fjern fremtid, Robotter vil blive indsat i forskellige applikationer af kompleks håndtering af objekter eller kontrol, som kræver den form for koordination og bevægelseskontrol, som mennesker gør ret godt.
Hvis en robot er designet til at gå med en relativt kort skridtlængde, så tillades relativt store variationer i ganghyppigheden. Imidlertid, hvis et længere skridt ønskes, så skal gangfrekvensen vælges omhyggeligt.
Et nyt blad udgivet i Fysisk gennemgang anvendt , "Synkron overgang i kompleks objektkontrol, " opstod med Wallace som en del af hans seniordesignprojekt i elektroteknik, overvåget af Lai. Wallace har modtaget et NSF Graduate Fellowship og er nu doktorand i ASU's School of Electrical, Computer- og energiteknik.
ASU-teamets forskning udvider på en banebrydende, virtuel eksperimentel undersøgelse for nylig udført af forskere ved Northeastern University, ved at bruge paradigmet til at holde kaffekop og tilføje en rullende kugle, at undersøge, hvordan mennesker manipulerer et komplekst objekt. Deltagerne roterede bevidst koppen på en rytmisk måde med evnen til at variere kraft og frekvens for at sikre, at bolden forblev indeholdt.
Northeastern-studiet viste, at deltagerne har en tendens til at vælge enten en lavfrekvent eller en højfrekvent strategi - rytmisk bevægelse af koppen - for at håndtere et komplekst objekt.
Et bemærkelsesværdigt fund var, at når en lavfrekvent strategi blev brugt, oscillationerne udviser fasesynkronisering, men antifasesynkronisering opstår, når en højfrekvent strategi blev anvendt.
"Da både de lave og høje frekvenser er effektive, det er tænkeligt, at nogle deltagere i det virtuelle eksperiment skiftede strategi, " sagde Wallace. "Dette rejser spørgsmål.
"Hvordan sker en overgang fra fasesynkronisering forbundet med en lavfrekvent strategi til antifasesynkronisering forbundet med en højfrekvent strategi, eller omvendt, " spurgte Wallace. "I parameterrummet, er grænsen mellem in-fase og antifase synkroniseringsregimer skarp, gradvis, eller sofistikeret?"
ASU-teamets forskning, foranlediget af Wallaces nysgerrighed, undersøgte overgangen mellem i-fase og antifase synkronisering ved hjælp af en ikke-lineær dynamisk model af et pendul fastgjort til en bevægelig vogn udsat for ekstern periodisk forcering.
Forskerne fandt ud af, at i det svagt tvingende regime, da den eksterne kørselsfrekvens er varieret, overgangen er brat og sker med resonansfrekvensen, som fuldt ud kan forstås ved hjælp af den lineære systemkontrolteori.
Ud over dette regime, en overgangsregion opstår mellem synkroniseringen i fase og modfase, hvor vognens og pendulets bevægelser ikke er synkroniserede. Det blev også fundet, at der er bistabilitet i og nær overgangsregionen på lavfrekvenssiden.
Samlet set, resultaterne indikerer, at mennesker er i stand til at skifte brat og effektivt fra en synkron attraktor til en anden, en mekanisme, der kan udnyttes til at designe smarte robotter til adaptivt at håndtere komplekse objekter i et foranderligt miljø.
"Det er muligt, at mennesker er i stand til at bruge både in-fase og antifase strategier dygtigt og at skifte fra en strategi til en anden problemfrit, måske uden selv at være klar over det. Resultaterne fra denne undersøgelse kan bruges til at implementere disse menneskelige færdigheder i bløde robotter med applikationer på andre områder, såsom rehabilitering og hjerne-maskine interface, " sagde Lai.
Derudover opgaver så trivielle som at føre ledninger i et karrosseri på et samlebånd – som mennesker udfører med lethed – unddrager sig stadig de mest avancerede maskiner.
"En systematisk kvantitativ forståelse af, hvordan mennesker interagerer dynamisk med deres omgivelser, vil for altid ændre, hvordan vi konstruerer vores verden, og kan revolutionere designet af smarte proteser og indlede en ny tidsalder for fremstilling og automatisering, " sagde Wallace. "Ved at efterligne den dynamisk gunstige adfærd, som mennesker vedtager ved håndtering af komplekse objekter, vi vil være i stand til at automatisere processer, der tidligere blev anset for at være umulige."
 Varme artikler
Varme artikler
-
 Forskere udvikler matematiske teknikker til design af formskiftende skallerEn ny teknik til at dyrke enhver målform fra enhver startform demonstreres ved at vokse ansigtet til faderen til kvantefysikken, Max Planck, fra en flad disk. Kredit:Harvard SEAS Naturen har en må
Forskere udvikler matematiske teknikker til design af formskiftende skallerEn ny teknik til at dyrke enhver målform fra enhver startform demonstreres ved at vokse ansigtet til faderen til kvantefysikken, Max Planck, fra en flad disk. Kredit:Harvard SEAS Naturen har en må -
 Strømlining af kvanteinformationstransmissionEt telemøde med resultaterne:fra venstre, William J. Munro, Nicolò Lo Piparo, Kae Nemoto, Michael Hanks, og Claude Gravel. Kredit:Kae Nemoto, Globalt forskningscenter for kvanteinformationsvidenskab,
Strømlining af kvanteinformationstransmissionEt telemøde med resultaterne:fra venstre, William J. Munro, Nicolò Lo Piparo, Kae Nemoto, Michael Hanks, og Claude Gravel. Kredit:Kae Nemoto, Globalt forskningscenter for kvanteinformationsvidenskab, -
 Forskere bygger hybrid kvantesystem ved at sammenfiltre molekyle med atomNIST-fysiker James Chin-wen Chou justerer en af laserstrålerne, der bruges til at manipulere et atom og et molekyle i eksperimenter, der kan hjælpe med at bygge hybrid kvanteinformationssystemer. Kr
Forskere bygger hybrid kvantesystem ved at sammenfiltre molekyle med atomNIST-fysiker James Chin-wen Chou justerer en af laserstrålerne, der bruges til at manipulere et atom og et molekyle i eksperimenter, der kan hjælpe med at bygge hybrid kvanteinformationssystemer. Kr -
 Sådan håndteres et mikroskopMikroskoper er enheder, der bruges til at forstørre små genstande, så de kan ses med det blotte øje. De fleste mikroskoper har flere forskellige kraftige linser knyttet til dem, så seeren kan inspicer
Sådan håndteres et mikroskopMikroskoper er enheder, der bruges til at forstørre små genstande, så de kan ses med det blotte øje. De fleste mikroskoper har flere forskellige kraftige linser knyttet til dem, så seeren kan inspicer
- Team hævder at have lavet en prøve af stanene
- Vibrationer på en chip føler et magnetfelt
- Flere orkaner i kategori 5 forudsagt af forskere
- NASA analyserer nr. Nedbør i Det Indiske Ocean med gennemblødning af separate cykloner
- Eksperter rejser bekymringer over rå kødkost til katte og hunde
- International forskning gør fremskridt mod forbedrede materialer til kvantesensorteknologi