


Robotisk bevægelse i buet rum trodser fysikkens standardlove
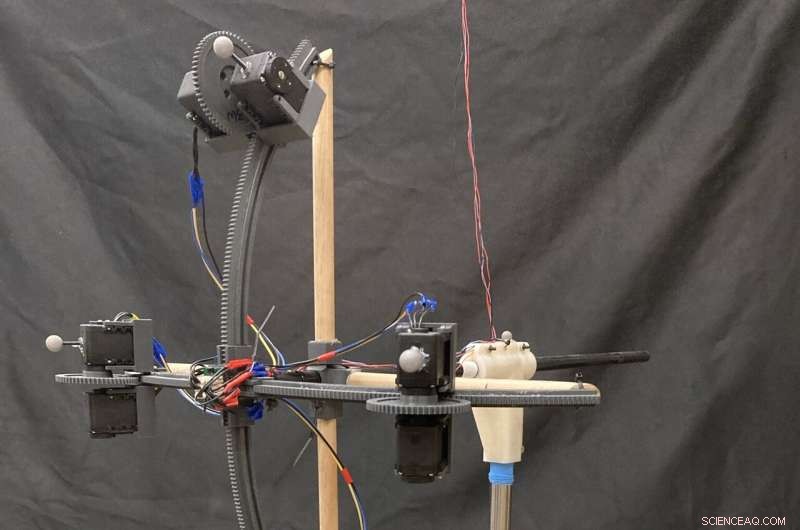
Eksperimentel realisering af en svømmer på en kugle med aktiverede motorer på en frit roterende bomarm. Kredit:Georgia Tech
Når mennesker, dyr og maskiner bevæger sig rundt i verden, skubber de altid mod noget, uanset om det er jorden, luften eller vandet. Indtil for nylig mente fysikere, at dette var en konstant, efter loven om bevaringsmomentum. Nu har forskere fra Georgia Institute of Technology bevist det modsatte - når kroppe eksisterer i buede rum, viser det sig, at de faktisk kan bevæge sig uden at skubbe mod noget.
Resultaterne blev offentliggjort i Proceedings of the National Academy of Sciences den 28. juli 2022. I papiret skabte et team af forskere ledet af Zeb Rocklin, adjunkt ved School of Physics ved Georgia Tech, en robot begrænset til en sfærisk overflade med hidtil usete niveauer af isolation fra omgivelserne, så disse krumningsinducerede effekter ville dominere.
"Vi lader vores formændrende objekt bevæge sig på det enkleste buede rum, en kugle, for systematisk at studere bevægelsen i buet rum," sagde Rocklin. "Vi lærte, at den forudsagte effekt, som var så kontraintuitiv, at den blev afvist af nogle fysikere, faktisk fandt sted:Da robotten ændrede sin form, bevægede den sig fremad rundt om kuglen på en måde, der ikke kunne tilskrives miljøinteraktioner."
Oprettelse af en buet sti
Forskerne satte sig for at studere, hvordan et objekt bevægede sig i et buet rum. For at begrænse objektet på kuglen med minimal interaktion eller udveksling af momentum med omgivelserne i det buede rum, lader de et sæt motorer køre på buede spor som bevægelige masser. De koblede derefter dette system holistisk til en roterende aksel, så motorerne altid bevæger sig på en kugle. Akslen blev understøttet af luftlejer og bøsninger for at minimere friktionen, og justeringen af akslen blev justeret med jordens tyngdekraft for at minimere den resterende tyngdekraft.
Derfra, mens robotten fortsatte med at bevæge sig, udøvede tyngdekraften og friktion små kræfter på den. Disse kræfter hybridiserede med krumningseffekterne for at producere en mærkelig dynamik med egenskaber, som ingen af dem kunne fremkalde alene. Forskningen giver en vigtig demonstration af, hvordan buede rum kan opnås, og hvordan den grundlæggende udfordrer fysiske love og intuition designet til flade rum. Rocklin håber, at de udviklede eksperimentelle teknikker vil give andre forskere mulighed for at udforske disse buede rum.
Applikationer i rummet og udenfor
Selvom effekterne er små, efterhånden som robotteknologi bliver mere og mere præcis, kan forståelsen af denne krumningsinducerede effekt være af praktisk betydning, ligesom det lille frekvensskift induceret af tyngdekraften blev afgørende for at give GPS-systemer mulighed for præcist at formidle deres positioner til orbitale satellitter. I sidste ende kan principperne for, hvordan et rums krumning kan udnyttes til bevægelse, tillade rumfartøjer at navigere i det meget buede rum omkring et sort hul.
"Denne forskning relaterer sig også til 'Impossible Engine'-undersøgelsen," sagde Rocklin. "Dens skaber hævdede, at den kunne bevæge sig fremad uden noget drivmiddel. Den motor var faktisk umulig, men fordi rumtiden er meget let buet, kunne en enhed faktisk bevæge sig fremad uden nogen ydre kræfter eller udsende et drivmiddel - en ny opdagelse." + Udforsk yderligere
Frirums lyskobling ved hjælp af buede mikrospejle
 Varme artikler
Varme artikler
-
 Forskning producerer intense lysstråler med kvantekorrelationerPotentielle anvendelser af forskning udført ved University of São Paulo inkluderer metrologi med høj præcision og informationskodning (pumpelaser til produktion af kvantekorrelerede lysstråler). Kredi
Forskning producerer intense lysstråler med kvantekorrelationerPotentielle anvendelser af forskning udført ved University of São Paulo inkluderer metrologi med høj præcision og informationskodning (pumpelaser til produktion af kvantekorrelerede lysstråler). Kredi -
 Forskere lærer, hvordan svømmeænder balancerer vandtrykket i deres fjer, mens de dykkerKredit:Pixabay/CC0 Public Domain Et team af studerende, der arbejder med Jonathan Boreyko, lektor i maskinteknik hos Virginia Tech, har opdaget den metode, ænder bruger til at suspendere vand i de
Forskere lærer, hvordan svømmeænder balancerer vandtrykket i deres fjer, mens de dykkerKredit:Pixabay/CC0 Public Domain Et team af studerende, der arbejder med Jonathan Boreyko, lektor i maskinteknik hos Virginia Tech, har opdaget den metode, ænder bruger til at suspendere vand i de -
 Hype og kontanter forvirrer offentlighedens forståelse af kvantecomputereEn ionfælde, der bruges til kvanteberegningsforskning i Quantum Control Laboratory ved University of Sydney. Michael Biercuk, Forfatter leveret Særlige rør og ledninger understøtter kvanteforskning i
Hype og kontanter forvirrer offentlighedens forståelse af kvantecomputereEn ionfælde, der bruges til kvanteberegningsforskning i Quantum Control Laboratory ved University of Sydney. Michael Biercuk, Forfatter leveret Særlige rør og ledninger understøtter kvanteforskning i -
 Gør et varmt sted til et koldt sted:Fano-formede lokale feltresponser undersøgt af en kvantepunkt(a) Skemaer af den QD-belastede nanoantenna begejstret af en polarisationsstyret lysstråle. (b) Simulerede spektrale dispersioner og rumlige fordelinger af de lokale feltresponser under x-polariseret
Gør et varmt sted til et koldt sted:Fano-formede lokale feltresponser undersøgt af en kvantepunkt(a) Skemaer af den QD-belastede nanoantenna begejstret af en polarisationsstyret lysstråle. (b) Simulerede spektrale dispersioner og rumlige fordelinger af de lokale feltresponser under x-polariseret
- Søgemaskine til nye gennembrud inden for fysik
- Ny indsigt i grafen og organiske kompositter i elektronik
- Hvordan en bakterie kan hjælpe med at løse plastikforureningskrisen
- Sådan fungerer nærdødsoplevelser
- Hvordan man lærer guld at fortælle venstre fra højre
- Team opdaterer den søde adskillelsesmetode fra 1950'erne for at rense nanopartikler fra organismer