


Magnetiske nanopartikelkæder tilbyder ny teknik til styring af bløde robotter

En selektiv aktivering af sidearmene på en blød robot i et vandret ensartet magnetfelt. Kredit:Sumeet Mishra, North Carolina State University
Forskere fra North Carolina State University har udviklet en teknik til at bruge kæder af magnetiske nanopartikler til at manipulere elastiske polymerer i tre dimensioner, som kunne bruges til fjernstyring af nye "bløde robotter."
Evnen til at kontrollere bevægelsen af bløde robotter, kombineret med deres fleksibilitet, giver dem potentielle applikationer lige fra biomedicinske teknologier til fremstillingsprocesser. Forskere er interesserede i at bruge magnetfelter til at styre bevægelsen af disse bløde robotter, fordi det kan foretages eksternt - kontrollen kan udøves uden fysisk forbindelse til polymeren - og fordi magnetfelter let kan opnås fra permanente magneter og elektromagneter.
Et team af forskere har nu fundet en måde at indlejre lange kæder af nanoskala magnetitpartikler i lag af elastisk polymer for at danne en magnetisk polymer nanokomposit. Ved at anvende et magnetfelt, forskerne kan styre måden, nanokompositbøjninger bøjer på - hvilket gør det til en blød robot.
Processen begynder med at dispergere nanopartikler af magnetit - et jernoxid - i et opløsningsmiddel. En polymer opløses derefter i blandingen, som hældes i en form for at danne den ønskede form. Et magnetfelt påføres derefter, får magnetit -nanopartiklerne til at indrette sig i parallelle kæder. Opløsningen tørres, låser kæderne på plads, og den færdige nanokomposit kan skæres, for yderligere at forfine sin form.
"Ved hjælp af denne teknik, vi kan skabe store nanokompositter, i mange forskellige former, som kan manipuleres eksternt, "siger Sumeet Mishra, en ph.d. studerende ved NC State og hovedforfatter af et papir om værket. "Nanopartikelkæderne giver os et forbedret svar, og ved at styre magnetfeltets styrke og retning, du kan kontrollere omfanget og retningen af bevægelser af bløde robotter. "
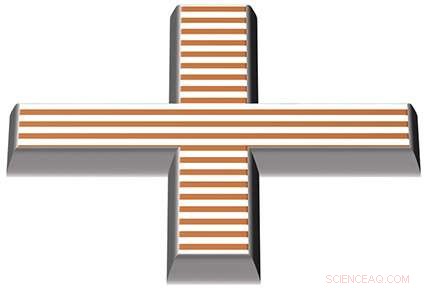
Kædet magnetisk polymer nanokomposit. Kredit:Sumeet Mishra.
Mekanismen stammer fra kædernes struktur. Forskerne har også konstrueret en simpel model til at forklare, hvordan de lænkede nanopartikler påvirker den mekaniske reaktion i magnetfelter.
"Nøglen her er, at nanopartiklerne i kæderne og deres magnetiske dipoler er arrangeret top-to-tail, med den positive ende af en magnetisk nanopartikel opstillet med den negative ende af den næste, hele vejen ned ad linjen, "siger Joe Tracy, en lektor i materialevidenskab og teknik ved NC State og tilsvarende forfatter til papiret. "Der er tale om noget, der kaldes magnetisk anisotropi, som er forårsaget af samling af nanopartikler i kæder. Når et magnetfelt påføres i en hvilken som helst retning, kæden orienterer sig selv for at blive så parallel som muligt til magnetfeltet, kun begrænset af tyngdekraftsbegrænsningerne og polymerens elasticitet. "
Forskerne mener, at denne teknik kan være særlig attraktiv for nogle biomedicinske applikationer, sammenlignet med blød robotik, der er afhængig af elektricitet eller lys til kontrol. "Elektrisk kontrol kan rejse sikkerhedsproblemer for nogle medicinske applikationer, "siger Mishra." Og både elektriske og lyssignaler udgør udfordringer med hensyn til at kommunikere disse signaler til enheder, der er indlejret i kroppen. Magnetiske felter, på den anden side, passerer let igennem - og udgør færre sikkerhedsudfordringer. "
Denne teknik bruger billige og meget tilgængelige materialer, og processen er relativt enkel og let at udføre, siger forskerne.
Papiret, "Selektiv og retningsbestemt aktivering af elastomerfilm ved hjælp af lænkede magnetiske nanopartikler, "udgives online i Royal Society of Chemistry Journal Nanoskala .
 Varme artikler
Varme artikler
-
 Nano-linsemikroskoper kan detektere vira, andre objekter på nanoskalaNano-linsebillede af H1N1 influenzavirus:Linsefri pixel super-opløst holografisk påvisning af individuelle influenza A (H1N1) vira. Skalabjælken viser 10 mikrometer. (Phys.org) – Ved at bruge bitt
Nano-linsemikroskoper kan detektere vira, andre objekter på nanoskalaNano-linsebillede af H1N1 influenzavirus:Linsefri pixel super-opløst holografisk påvisning af individuelle influenza A (H1N1) vira. Skalabjælken viser 10 mikrometer. (Phys.org) – Ved at bruge bitt -
 Fremtidens energilagringModificerede grafen-aerogeler har et stort overfladeareal og fremragende ledningsevne, og er lovende til applikationer til højeffekts lagring af elektrisk energi. Kredit:Ryan Chen. Personlig elekt
Fremtidens energilagringModificerede grafen-aerogeler har et stort overfladeareal og fremragende ledningsevne, og er lovende til applikationer til højeffekts lagring af elektrisk energi. Kredit:Ryan Chen. Personlig elekt -
 Banebrydende fund om nanopartikellevering af HIV/AIDS-medicin til hjernenKredit:CC0 Public Domain En biokemiforsker fra University of Miami Miller School of Medicine har fundet ud af, at et nanopartikel-lægemiddelleveringssystem kan reducere HIV/AIDS-virale reservoirer
Banebrydende fund om nanopartikellevering af HIV/AIDS-medicin til hjernenKredit:CC0 Public Domain En biokemiforsker fra University of Miami Miller School of Medicine har fundet ud af, at et nanopartikel-lægemiddelleveringssystem kan reducere HIV/AIDS-virale reservoirer -
 Lille supersonisk jet-injektor fremskynder fremstilling af additiv i nanoskalaFarvelagt scanningselektronmikroskopbillede viser positionen af en resistiv termisk enhed RTD (nanoskala termometer), når aflejringssubstratet bevæger sig i forhold til dysekapillæren i mikrostørrel
Lille supersonisk jet-injektor fremskynder fremstilling af additiv i nanoskalaFarvelagt scanningselektronmikroskopbillede viser positionen af en resistiv termisk enhed RTD (nanoskala termometer), når aflejringssubstratet bevæger sig i forhold til dysekapillæren i mikrostørrel
- En mobiltelefon til jul betyder ikke mindre familietid for teenagere
- Forskere efterlyser fornyet fokus på termoelektrisk køling
- Typer af hygrometre
- Virvlende sværme af bakterier giver indsigt i turbulens
- Forskel mellem et halogen og en halide
- Undersøgelse viser, at naturlige uderum ikke nødvendigvis er almindelige på skolerne