


Flydende magnetiske mikrorobotter til fiberfunktionalisering
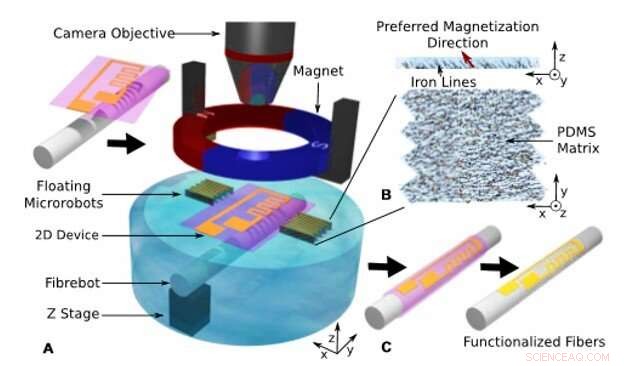
Opsætning af den mikrorobotstøttede højpræcisions vådoverførsel. (A) Magnetisk styrede mikrorobotter via en ekstern magnet for at justere en flydende 2D-enhed på et målsubstrat (f.eks. optisk fiber og 3D -mikroenhed). (B) Udsigt over mikrorobotstrukturen, hvor jernlinjer fanget i en elastomermatrix bruges til at gemme en foretrukken magnetiseringsretning. (C) Slutmonterede enheder med det funktionelle mønster justeret med en 5 µm og 0,4 ° præcision. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Minimalt invasiv kirurgi bruges i stigende grad til at målrette mod små læsioner, og der er en stigende efterspørgsel efter miniaturiserede medicinske værktøjer. Disse omfatter mikrokatetre, leddelt mikrotang eller pincet til at føle og aktivere under præcisionskirurgi. Den nøjagtige integration og funktionalisering af kemiske og fysiske sensorer er stadig en stor udfordring. I en ny undersøgelse vedr Videnskab robotik , Antoine Barbot og kolleger ved Institute of Medical Robotics i Kina og Hamlyn Center for Robotic Surgery i London udviklede en ny mikrorobotisk platform til at funktionalisere fibre i området fra 140 til 830 mikrometer (µm). De justerede derefter de 2 mm x 3 mm og 200 µm tykke mikrobotter til flydende elektroniske kredsløb på en fiber ved hjælp af en våd overførselsproces.
Forskerne kontrollerede mikrorobotternes position og orientering ved luft-vand-grænsefladen ved hjælp af en permanent magnet. Ved at bruge magnetens uhomogene magnetfelt styrede de den præcise afstand mellem de to mikrorobotter og lettede manøvrer med "greb og slip" med flydende elektroniske mønstre. Barbot et al. foreslået en model for denne kontrolproces, inklusive interaktioner mellem mikrorobotterne gennem overfladespænding for detaljeret præstationsvalidering. De demonstrerede en række eksempler på sensorudførelsesformer på en fiber med en diameter på 200 µm og 3D-enheder.
Den kliniske vægt på forbedret medicinsk overvågning og diagnose har styret fremtiden for kirurgi mod præcisionsintervention. Den nylige introduktion af robotværktøjer på fibre til at danne fiberbots har gjort det muligt for forskere at kombinere billeddannelse, sansning og mikromanipulation i en enkelt fiber. Sofistikerede mikrogribere kan konstrueres direkte på spidsen af en fiber ved hjælp af to-foton polymerisation. Forskere kan etablere mikroaktivering ved hjælp af hydrauliske links, der udnytter mikrokapillærfunktionen til at bruge enheden til målrettet medicinafgivelse og fokuseret energi såsom laserablation. Optiske fibre er et alsidigt substrat til at udvikle fleksible mikroværktøjer. Deres overflader giver en ideel placering til at inkludere flere sensorer langs dens længde.
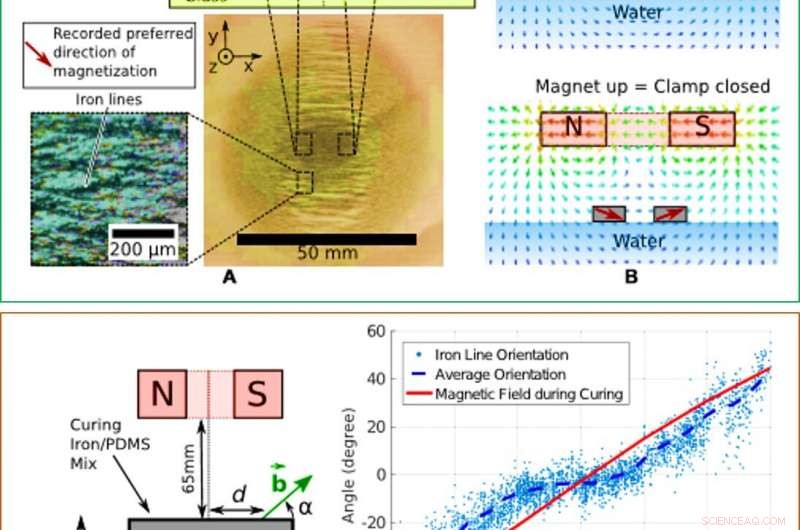
TOP:Flydende mikrorobotter med forskellige foretrukne magnetiseringsretninger:Fremstillings- og kontrolprincipper. (A) Fremstilling af mikrorobotter. Forskellige magnetiseringsretninger blev programmeret i materialet med en ringmagnet. (B) Klemmemekanisme brugt i denne undersøgelse. Mikrorobotter blev flyttet sammen eller fra hinanden afhængigt af magnetens lodrette position, muliggør effektiv fastspænding af mønsteret, der skal overføres, efterfulgt af rotations- og orienteringskontrol. BUND:Jernlinjeorientering inde i PDMS-matrixen. (A) Micro-CT-rekonstruktion af polymer/jern-blandingen. Jernlinjerne flugtede med magnetfeltretningen under polymerhærdningen. (B) Jernlinjeretning kontra position. Jernlinjernes retning fulgte retningen af det hærdende magnetiske felt. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Imidlertid, den direkte mønsterdannelse af mikroelektronik til små, buede genstande brugt til kliniske applikationer er udfordrende, da eksisterende mikrofremstillingsprocesser primært er skræddersyet til flade underlag. Forskere har hidtil brugt to hovedoverførselsmetoder; herunder tør transfer og våd transfer teknik. Tør overførsel giver typisk bedre renlighed og højere præcision sammenlignet med våd overførsel på grund af fraværet af vådt ætsemiddel og væskeforstyrrelser. Vådoverføringsteknikker, der sandsynligvis vil forekomme ved kirurgiske indgreb, er begrænset af vanskeligheder med nøjagtigt at placere og øse flydende anordninger. Dette skyldes mangel på præcisionsværktøjer eller robotplatforme til en præcis praktisk tilgang. Microrobot-manipulatorer kan derfor løse nogle af de store problemer, man står over for ved manuelle vådoverførselsmetoder.
I nærværende arbejde, Barbot et al. foreslået brugen af mobile mikrorobotter ved luft/vand-grænsefladen for præcist at kontrollere mønsterbevægelsen under våd overførsel. For at lette enkel og præcis kontrol, forskerne foreslog at udvikle et par mikrorobotter til at forstå flydende mønstre. De opnåede dette ved hjælp af et magnetfelt genereret med en enkelt permanent magnet koblet til at indstille magnetiseringsretningen for robotens bestanddele. Barbot et al. brugte interaktionen mellem mikrorobotterne og magnetfeltet til at placere mikrorobotparret på to forskellige steder i luft/vand-grænsefladen og danne en griber.
Microrobot-baseret mønstergreb og manipulation. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Forskerne kontrollerede afstanden mellem de to mikrorobotter ved at kontrollere afstanden mellem enheden og magneten. De konstruerede enhederne ved hjælp af en elastomer og polydomethylsiloxan (PDMS) blandet med jernpulver. For et givet eksperiment, Barbot et al. magnetiseret hver mikrorobot for at reagere på samme måde som et givet magnetfelt. Forskerne brugte et 200 µm lag af PDMS og jernblandingen under påvirkning af et svagt magnetfelt til at samle jernlinjer i PDMS-matrixen. De termisk hærdede PDMS for at holde jernlinjestrukturerne på plads og evaluerede produktets orientering ved hjælp af røntgenmikrotomografi.
Forskerne udviklede par af mikrorobotter med tilpassede magnetiseringsretninger ved hjælp af forskellige dele af jern/PDMS-lagene til at danne rektangulære robotter, der måler 2 mm gange 3 mm ved 200 µm tykkelse. De tilføjede små tandlignende strukturer til mikrorobotterne for at begrænse bevægelsen af mønsteret under gribeprocesser. Holdet observerede positionerne af forskellige mikrorobotter og deres respektive reaktion på forskellige lodrette positioner af magneten for at opnå to bevægelsesmønstre for mikrorobotparrene, afhængig af vinklen (α) mellem deres magnetisering og det vandrette plan.
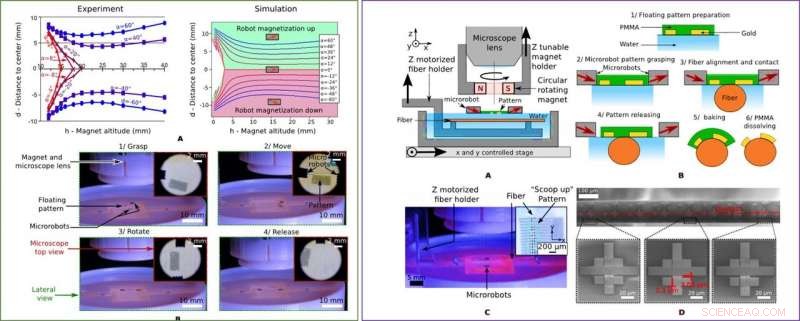
VENSTRE:Magnetisk styring af mikrorobotparret. (A) Forskellige ligevægtspositioner af mikrorobotparret som påvirket af magnetens lodrette position. Til venstre:Eksperimentelle resultater. Til højre:Simuleringsresultater opnået ved hjælp af endelig elementmodellering af magnetfeltet. (B) Optiske billeder, der viser mikrorobotparret, der manipulerer et flydende mønster. TIL HØJRE:Fibermønster ved hjælp af mikrorobot-assisteret våd overførsel. (A) Set fra siden af overførselsbassinet med mikrorobotparret, der holder et mønster, der skal overføres. (B) Fremstillingsarbejdsgang til mønstre af Au-mikroenheder på fiberen ved hjælp af den foreslåede mikrorobot-assisteret våd overførsel. (C) Flydende mønster (gitterstrukturer) overført til en optisk fiber med en diameter på 200 µm set fra mikroskopet. (D) Scanning elektronmikroskopi (SEM) (Tescan SEM/FIB LYRA3 XM) billeder af to på hinanden følgende overføringspositionsmarkører til vurdering af den opnåelige overføringsnøjagtighed af det foreslåede system. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Barbot et al. designet mikrorobotterne og tillod magnetens højde at kontrollere afstanden mellem de to robotter og regulere åbning og lukning af mikrorobotgribere. Forskerne sammenlignede de eksperimentelle resultater med en simulering for at forstå interaktionen mellem mikrorobotterne. De observerede fire frihedsgrader (DOF'er) til at kontrollere mikrorobotparrene. Disse omfattede greb (en DOF), positionering (to DOF'er) og orienteringer (en DOF) under våd overførsel. Forskerne manipulerede det flydende mønster ved hjælp af disse fire kontrollerbare input. De karakteriserede magnetiseringsegenskaben af jern/PDMS-blandingen som en generel guide til konsistente mikrorobotdesigns.
Under eksperimenterne holdet sænkede først magneten for at flytte mikrorobotterne fra hinanden og placere dem omkring målmønsteret. De hævede derefter magneten for at lukke mellemrummet mellem mikrorobotterne og gribe mønsteret for efterfølgende justering til målfibersubstratet. Mikrorobotternes gribekraft forårsagede ikke nogen deformation af mønsteret. Endelig, de sænkede magneten igen for griberen for at frigive mønsteret og flytte robotparret væk. Ved hjælp af opsætningen, forskerne udførte våd overførsel af det flydende mønster til en optisk fiber. I løbet af de seks trin, mikrorobot fabrikationsproces, forskerne overførte vilkårlige guld (Au) mønstre såsom elektroder eller strain gauges til fiberen. For at forstå præcisionen af mønsteroverførsel, de målte skiftet mellem to komplementære mønstre aflejret på fiberen. Barbot et al. observerede udfordringer for langtidsmønsteradhæsion på buede kontaktsteder af fiberen.
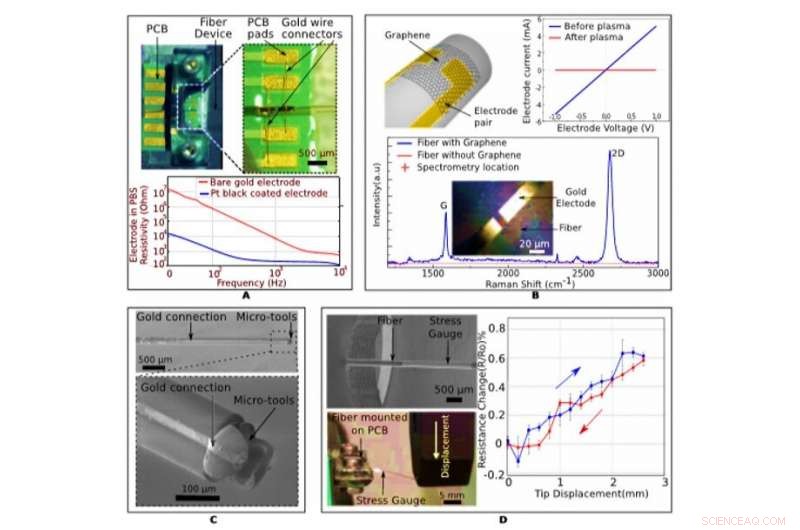
Eksempel på anvendelser af mikrorobot-assisteret våd overførsel til fiberfunktionalisering. (A) Øverst:Grænseflade mellem fiberunderstøttede elektroder og et dedikeret printkort. Nederst:Impedanskarakterisering af en to-elektrode enhed med og uden elektroaflejring af Pt sort. (B) Fiberbaserede 2D-grafenenheder. Sekventielle våde overførsler blev foretaget for successivt at mønstre Au-sporet og derefter grafenfilmen. Tilstedeværelsen af grafen blev vurderet med Raman-spektrometri og en plasma-destruktiv test. (C) SEM-billede af et funktionaliseret mikroværktøj 3D printet til spidsen af en fiber. Au-sporet blev justeret og overført til 3D-strukturen med god overensstemmelse. (D) Fiberbaseret strain gauge designet til måling af fiberdeformation baseret på dens resistivitetsændring. SEM billede af enheden, billede af oplevelsen, og det resulterende signal. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Teamet optimerede den foreslåede mikrorobotassisterede vådoverførselsmetode til at konstruere en række forskellige enheder. De dannede elektroniske enheder ved at overføre fibre med mønstre til et printkort og realiserede elektriske forbindelser ved hjælp af 25 µm Au-ledninger. De dannede sådanne elektrokemiske sensorer til potentielle anvendelser i mikrokatetre og andre implanterbare enheder. Forskerne demonstrerede også fremstillingsteknikken ved at bruge flere lag af forskellige materialer til at danne en to-terminal grafenanordning på en glasfiber med en diameter på 200 µm. De valgte grafen på grund af materialets unikke elektrodeegenskaber. De brugte metoden til at integrere aktive elektromekaniske enheder på 3D-substrater, efterfulgt af mønstre på komplekse 3D-strukturer. For eksempel, de overførte et Au-mønster på et 170 µm glaskapillær fiberspids mikroværktøj (konstrueret ved hjælp af to-foton litografi). Arbejdet vil bane vejen for at konstruere komplekse elektromekaniske enheder i mikroskala ved hjælp af hybride mikrofremstillingsteknikker med brede anvendelser under præcis klinisk biomarkørdetektion og præcisionskirurgi.
På denne måde Antoine Barbot og et team af tværfaglige forskere præsenterede en praktisk løsning til vådoverførsel af tynde film og 2-D krystaller med mikrometer-niveau præcision på 3-D substrater. De udviklede en flydende magnetisk mikrorobot, der var i stand til at lagre en foretrukken magnetiseringsretning for at manipulere dem under et permanent magnetfelt. Forskerholdet finjusterede robotmikrogriberen ved at justere magnetens position for at gribe, juster og slip flydende 2D-mønstre.
Den foreslåede opsætning er enkel, reproducerbar og pålidelig. Den nye fremstillingsteknik åbner nye applikationer inden for interventionskirurgi med elektrokemiske sensorer, mikroaktuatorer og komplekse 2-D elektroniske enheder. Det fremtidige fokus for Barbot et al. vil omfatte ingeniørhierarkiske enheder baseret på flerlags van der Waals 2-D krystaller for at integrere aktive komponenter på fiberspidser og i sidste ende danne aktiverings- og sansekapacitetsdrevne fiberbots på nanoskala eller mikroskala.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Forskere demonstrerer praktiske metal nanostrukturerEn kunstners syn på en metasflade bestående af en rektangulær række af rektangulære guldnanostrukturer, der genererer plasmoniske overfladegitterresonanser. Kredit:Illustration af Yaryna Mamchur, medf
Forskere demonstrerer praktiske metal nanostrukturerEn kunstners syn på en metasflade bestående af en rektangulær række af rektangulære guldnanostrukturer, der genererer plasmoniske overfladegitterresonanser. Kredit:Illustration af Yaryna Mamchur, medf -
 Nyt gennembrud for strukturel karakterisering af metalnanopartiklerKredit:hakkinen1 Forskere ved Xiamen University i Kina og University of Jyväskylä i Finland har karakteriseret en række stabile 1,5 nm metal nanoclusters indeholdende 44 metalatomer, stabiliseret
Nyt gennembrud for strukturel karakterisering af metalnanopartiklerKredit:hakkinen1 Forskere ved Xiamen University i Kina og University of Jyväskylä i Finland har karakteriseret en række stabile 1,5 nm metal nanoclusters indeholdende 44 metalatomer, stabiliseret -
 Grafen glider glat hen over guldetEt grafen nanobånd blev forankret i spidsen af et atomkraftmikroskop og trukket over en guldoverflade. Den observerede friktionskraft var ekstrem lav. Kredit:University of Basel, Institut for Fysik
Grafen glider glat hen over guldetEt grafen nanobånd blev forankret i spidsen af et atomkraftmikroskop og trukket over en guldoverflade. Den observerede friktionskraft var ekstrem lav. Kredit:University of Basel, Institut for Fysik -
 Nær-infrarød synergiterapi til cancer nanoclustersSkematisk illustration af HMNCerne for målrettet MR, responsiv frigivelse af lægemidler, NIR-II-induceret fototermisk behandling og kemodynamisk terapi. Kredit:Wang Hui Som en minimalt invasiv met
Nær-infrarød synergiterapi til cancer nanoclustersSkematisk illustration af HMNCerne for målrettet MR, responsiv frigivelse af lægemidler, NIR-II-induceret fototermisk behandling og kemodynamisk terapi. Kredit:Wang Hui Som en minimalt invasiv met
- Forvirrende,
- Nanoswitches omdanner lys til makroskopisk bevægelse
- Næste stop Mars:3 rumfartøjer ankommer hurtigt efter hinanden
- Bærbar belastningssensor ved hjælp af lystransmittans hjælper med at måle fysiske signaler bedre
- Luftforureningseksponeringen skifter fra udendørs til indendørs - her er hvorfor
- Hvorfor en dråbe olie hopper i en vand/ethanolgradient og til sidst falder til bunden af en krukk…