


Magnetiske mikrorobotter bruger kapillarkræfter til at lokke partikler til position
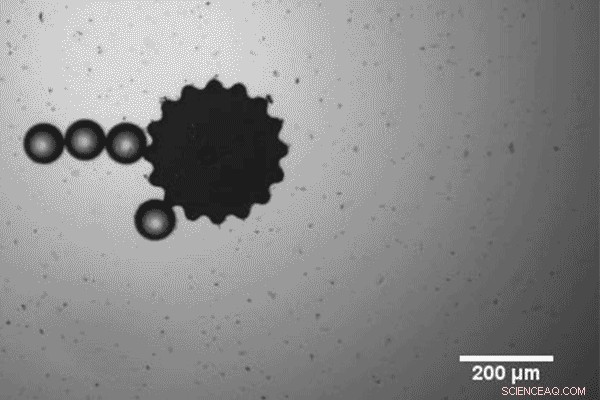
Vist i 4x hastighed, en blomsterformet mikrorobot nærmer sig plastperler, bruger kapillarkræfter til at holde dem til et af dets kronblade, frigiver dem derefter på det ønskede sted ved at dreje på plads. Kredit:Penn Engineering
På mikroskopiske skalaer, plukke, placering, indsamling, og at arrangere objekter er en vedvarende udfordring. Fremskridt inden for nanoteknologi betyder, at der er stadig mere komplekse ting, vi gerne vil bygge i disse størrelser, men værktøjer til at flytte deres komponentdele mangler.
Ny forskning fra School of Engineering and Applied Science viser, hvor enkelt, mikroskopiske robotter, fjernstyret af magnetfelter, kan bruge kapillarkræfter til at manipulere objekter, der flyder ved en olie-vand-grænseflade. Dette system blev demonstreret i en undersøgelse offentliggjort i tidsskriftet Anvendt fysik bogstaver .
Undersøgelsen blev ledet af Kathleen Stebe, Richer &Elizabeth Goodwin Professor i Penn Engineering's Department of Chemical and Biomolecular Engineering, og Tianyi Yao, en kandidatstuderende i sit laboratorium. Nicholas Chisholm, en postdoktor i Stebes laboratorium, og Edward Steager, en forsker i Penn Engineering's GRASP lab bidrog til forskningen.
Mikrorobotterne i Penn -teamets undersøgelse er tynde magnetskiver, omkring en tredjedel af en millimeter i diameter. På trods af at de ikke har egne bevægelige dele eller sensorer, forskerne omtaler dem som robotter på grund af deres evne til at vælge og placere vilkårlige objekter, der er endnu mindre end de er.
Denne evne er en funktion af det specialiserede miljø, hvor disse mikrorobotter arbejder:ved grænsefladen mellem to væsker. I dette studie, grænsefladen er mellem vand og hexadecan, en almindelig olie. En gang der, robotterne deformerer formen på denne grænseflade, hovedsageligt omgiver sig med et usynligt "kraftfelt" af kapillære interaktioner.
De samme kapillarkræfter, der trækker vand fra et træs rødder til dets blade, bruges her til at trække plastikmikropartikler i kontakt med robotten, eller andre partikler, der allerede sidder fast i kanterne.
"Vi har brugt disse kapillarkræfter til at samle ting før, men nu er robotterne og partiklerne meget lettere og et par størrelsesordener mindre i diameter, "Stebe siger." Når du bevæger dig ned til mikronskalaen, det betyder, at en anden slags fysik styrer forvrængningerne. At samle og organisere objekter, der er et par snesevis af mikroner på tværs, er en ganske stor bedrift, og ikke noget, som vi kommer til at kunne gøre i hånden. "
Undersøgelsen demonstrerede fysikken, der styrer interaktionerne mellem disse mikrorobotter og de plastpartikler, de havde til opgave at manipulere.
"I fortiden, "Stebe siger, "vi tog statiske objekter og lavede forvridninger omkring dem, viste derefter, hvordan partikler blev tiltrukket til områder med 'høj krumning' af disse forvrængninger. Nu, i stedet for et statisk objekt, vi har en magnet, der fungerer som en mobil forvrængningskilde. "
"Dette gør tingene mere komplicerede, "Chisholm siger." Da robotten bevæger sig mod partikler, det skaber et strømningsfelt, der skubber partiklerne væk, så nu er der hydrodynamisk frastødning og kapillær attraktion, der interagerer. Partiklerne følger energiminimum, hvilket kan betyde at bevæge sig op ad bakke. "
Med en firkantet robot, forskerne så, at når de fik partikler over deformationens top, de blev stærkt tiltrukket af hjørnerne. Dette er en potentielt nyttig ejendom, da robotterne kunne nærme sig deres mål fra en lang række vinkler og retninger og stadig ende med partiklen på et forudsigeligt sted.
"Vi har vist, at når du ændrer robotformen, du ændrer typen og styrken af interaktionerne, "Stebe siger." Skarpe hjørner holder fast i partiklerne som en grum død, men når vi blødgør hjørnerne, vi kan bare give robotterne et spin for at frigive dem. "
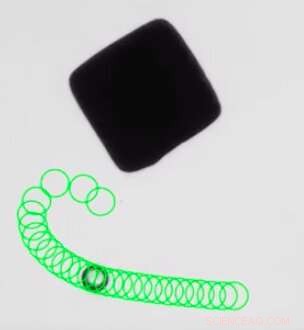
Partikler er stærkt tiltrukket af hjørnerne af firkantede robotter. Den grønne kontur viser den bane partiklen tager, når robotten nærmer sig. Kredit:University of Pennsylvania
Ud over et blødt hjørne, forskerne eksperimenterede også med en rund robot, samt en blomsterformet. Alle havde den ekstra fordel, at de kunne frigive deres last præcist ved at spinde på plads, med den blomsterformede robots "kronblade", der giver den mest præcise kontrol over placeringen af en lastpartikel.
Endelig, holdet demonstrerede en dockingstation. Bestående af et statisk stykke bølget plast, dockingstationen er en del over og en del under grænsefladen. Dette arrangement giver et meget forudsigeligt sæt forvrængninger, hvor materialet krydser grænsefladen.
"Vi kan flytte disse robotter rundt og samle ting, "Steager siger, "at bygge virkelig komplicerede materialer op ved at samle stykkerne op ad gangen og forankre dem, hvor vi vil."
Fordi interaktionerne mellem robotter og partikler ikke har noget at gøre med de materialer, de er lavet af, en lang række applikationer er mulige.
"Partiklerne, vi manipulerer i denne undersøgelse, handler om den gennemsnitlige størrelse af en menneskelig celle eller mindre, "Yao siger, "så denne form for system kan have applikationer inden for encellet biologi, med en magnetisk mikro-robot, der bevæger individuelle celler gennem forskellige stadier af et eksperiment. "
"Disse partikler kan også være en del af et sensorsystem, "siger han." Hvis du havde en robot og sensorpartikler på en grænseflade, du kunne samle disse partikler og bære hele samlingen mod målområdet med en ekstremt fin grad af rumlig kontrol. I dette scenario, en meget lav koncentration af sensorpartikler er nødvendig, og de kan let trækkes tilbage efter testen. "
Fremtidens arbejde vil indebære udvikling af et større bibliotek af mikrorobotformer og adfærd til manipulation af objekter i deres miljø, samt mere robuste sanse- og kontrolsystemer, der ville tillade en større grad af autonomi for robotterne.
 Varme artikler
Varme artikler
-
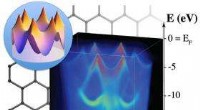 Lyser på grafen-metal-interaktionerMåling af de elektroniske bånd af tolagsgrafen på ruthenium, som har egenskaberne ved fritstående monolag grafen. Et af disse kendetegn er en typisk keglelignende form af båndene nær Fermi-energien. I
Lyser på grafen-metal-interaktionerMåling af de elektroniske bånd af tolagsgrafen på ruthenium, som har egenskaberne ved fritstående monolag grafen. Et af disse kendetegn er en typisk keglelignende form af båndene nær Fermi-energien. I -
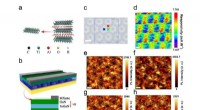 MXene-GaN van der Waals metal-halvlederforbindelser til højtydende fotodetektionen, Skematisk illustration af syntesen og strukturen af Ti3C2Tx MXene. b, Skematisk diagram af den foreslåede PD udarbejdet på det mønstrede safirsubstrat. c, høj forstørrelse (skala bar:3 μm) optis
MXene-GaN van der Waals metal-halvlederforbindelser til højtydende fotodetektionen, Skematisk illustration af syntesen og strukturen af Ti3C2Tx MXene. b, Skematisk diagram af den foreslåede PD udarbejdet på det mønstrede safirsubstrat. c, høj forstørrelse (skala bar:3 μm) optis -
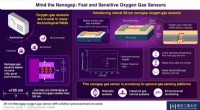 Pas på nanogap:Hurtige og følsomme iltgassensorerKredit:Tokyo Tech Ilt (O 2 ) er en essentiel gas, ikke kun for os og de fleste andre livsformer, men også for mange industrielle processer, biomedicin, og miljøovervågningsapplikationer. I betra
Pas på nanogap:Hurtige og følsomme iltgassensorerKredit:Tokyo Tech Ilt (O 2 ) er en essentiel gas, ikke kun for os og de fleste andre livsformer, men også for mange industrielle processer, biomedicin, og miljøovervågningsapplikationer. I betra -
 Fundamentalt gennembrud i fremtiden for design af materialerProfessor John Boland afbildet ved Scanning Tunneling Microscope. Kredit:AMBER, Trinity College Dublin Et team af forskere fra AMBER center med base i Trinity College Dublin, har fået et gennembru
Fundamentalt gennembrud i fremtiden for design af materialerProfessor John Boland afbildet ved Scanning Tunneling Microscope. Kredit:AMBER, Trinity College Dublin Et team af forskere fra AMBER center med base i Trinity College Dublin, har fået et gennembru
- Afslappede miljøregler øger risikoen under naturkatastrofer
- VR -teknologi giver ny mening til at feriere derhjemme. Men er det virkelig en erstatning for rejser…
- Sådan beregnes middelværdien, medianen & tilstand
- Udforsker den mystiske oprindelse af de mest ekstreme lysglimt i universet
- Hvad er nogle fugle fundet i Michigan?
- De to kræfter, der holder planeterne i bevægelse omkring solen