


Anmeldelsespapir:Små biohybride robotter til intelligent medicinafgivelse
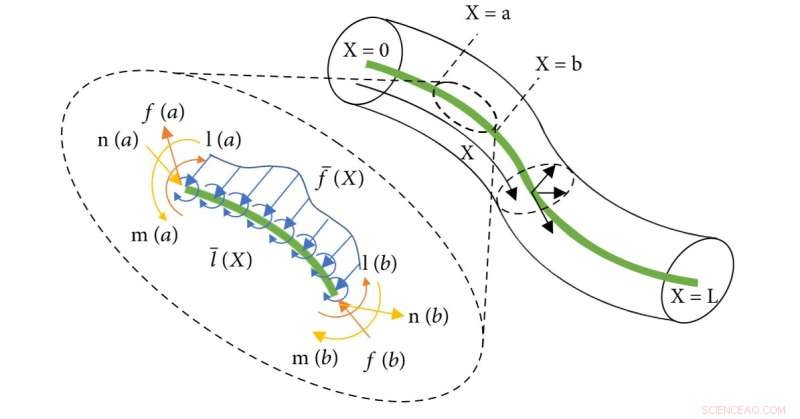
Diagram over kraftanalyse af kontinuerlige medier. Kredit:Cyborg and Bionic Systems (2022). DOI:10.34133/2022/9783517
En gennemgang af videnskabsmænd ved Zhejiang University opsummerede udviklingen af kontinuumrobotter ud fra aspekterne design, aktivering, modellering og kontrol. Det nye reviewpapir, offentliggjort den 26. juli i tidsskriftet Cyborg and Bionic Systems , gav et overblik over de klassiske og avancerede teknologier i kontinuum-robotter, sammen med nogle udsigter, der hurtigst muligt skal løses.
"Nogle kontinuumrobotter i lille skala med nye aktiveringsmetoder bliver bredt undersøgt inden for interventionel kirurgisk behandling eller endoskopi, men karakteriseringen af deres mekaniske egenskaber er stadig et andet problem," forklarede studieforfatter Haojian Lu, professor ved Zhejiang Universitet.
For at realisere miniaturiseringen af kontinuum-robotter er mange banebrydende materialer blevet udviklet og brugt til at realisere aktiveringen af robotter, hvilket viser unikke fordele. Kontinuumsrobotterne indlejret med mikromagnet eller lavet af ferromagnetisk kompositmateriale har nøjagtig styreevne under et eksternt kontrollerbart magnetfelt; Magnetisk bløde kontinuumrobotter kan derimod opnå små diametre, op til mikronskalaen, hvilket sikrer deres evne til at udføre målrettet terapi i bronkier eller i cerebrale kar.
Det er dog svært for magnetisk bløde kontinuum-robotter at bevare stabiliteten under ydre kræfter, og de små stive magnetspidser risikerer at falde af inde i kroppen under drift. For at opnå sikrere og mere pålidelig kontrol bruges formhukommelsesmaterialer til at drive kontinuumrobotten og til kardiovaskulær undersøgelse og nasopharyngeal administration. Den vigtigste fordel ved dette selvdeformerende materiale er, at det giver forlængelse, bøjning og vridning af hovedstammen og kan opnå overordnet aktivering, mens den bibeholder en lille skala, men dets iboende hysterese gør det vanskeligt at opnå hurtig reaktion og præcis positionering ved samme tid, og den har en lav belastningskapacitet og ret kompleks rørledningsføring.
I betragtning af de ikke-lineære deformationer forårsaget af aktivering, materialeelasticitet og følsomhed over for kontakt med omgivelserne, står kontinuumrobotter over for store udfordringer i præcis analytisk modellering.
En af de store udfordringer ved modellering er at forenkle modellerne og kompromittere forholdet mellem beregningskompleksitet og modelnøjagtighed.
På samme måde er kontrolproblemet også en stor udfordring for kontinuum-robotten. Udfordringen er at finde den korrekte aktiveringsværdi for at nå den ønskede tilstand for at udføre en given opgave. Modelbaseret styring er meget afhængig af den præcise modellering af kontinuumrobotten og sensorernes perceptionsnøjagtighed. Derudover bruges fjernbetjening ofte til at styre kontinuumrobotten på det medicinske område.
"Forskningsfeltet for kontinuumrobotter har gjort store fremskridt, men der er stadig nogle problemer, der skal løses, herunder miniaturisering, mere kraftfuld perception og den stabile simuleringsmotor," sagde Lu. + Udforsk yderligere
Hvordan en slank, slangelignende robot kunne give læger nye måder at redde liv på
 Varme artikler
Varme artikler
-
 Enkelt atomlag fælde til lithium-ion migrationAtomopløsningsbilleder af SALT. Kredit:ZHU Feng, Md Shafiqul Islam, ZHOU Lin, et al. Den 14. april, Prof. Ma Cheng fra University of Science and Technology of China (USTC) fra Chinese Academy of S
Enkelt atomlag fælde til lithium-ion migrationAtomopløsningsbilleder af SALT. Kredit:ZHU Feng, Md Shafiqul Islam, ZHOU Lin, et al. Den 14. april, Prof. Ma Cheng fra University of Science and Technology of China (USTC) fra Chinese Academy of S -
 Nye nanokompositfilm øger varmeafledningen i tynd elektronikI en ny undersøgelse designet forskere fra Japan fleksible termiske diffusionsfilm lavet af cellulose nanofibermatrix og kulfiberfyldstof ved hjælp af flydende fase tredimensionel mønster. De forbered
Nye nanokompositfilm øger varmeafledningen i tynd elektronikI en ny undersøgelse designet forskere fra Japan fleksible termiske diffusionsfilm lavet af cellulose nanofibermatrix og kulfiberfyldstof ved hjælp af flydende fase tredimensionel mønster. De forbered -
 Mod umærkelig elektronik, som du ikke kan se eller føleVerdens tyndeste og mest gennemsigtige potentielle sensorark. Kredit:Osaka University Gennemsigtig elektronik - såsom head-up-skærme, der giver piloter mulighed for at læse flydata, mens de holder
Mod umærkelig elektronik, som du ikke kan se eller føleVerdens tyndeste og mest gennemsigtige potentielle sensorark. Kredit:Osaka University Gennemsigtig elektronik - såsom head-up-skærme, der giver piloter mulighed for at læse flydata, mens de holder -
 En ny model forudsiger sammenpresset nanokrystalform, når den er dækket under grafenAmes Laboratory og Northeastern University udviklede og validerede en model, der forudsiger formen af metalnanopartikler dækket af 2D-materiale. Det øverste tæppe af grafen modstår deformation, klem
En ny model forudsiger sammenpresset nanokrystalform, når den er dækket under grafenAmes Laboratory og Northeastern University udviklede og validerede en model, der forudsiger formen af metalnanopartikler dækket af 2D-materiale. Det øverste tæppe af grafen modstår deformation, klem
- Astronomer opdager ny lysende højrødforskydningskvasar
- Anti-resonans optisk fiber med hul kerne reducerer støj
- Modulær platform til montering af biosensorer
- Multitasking på arbejdspladsen kan føre til negative følelser
- Boykot eller buycott? Virksomhedsaktivismens rolle
- En elektrisk kontakt til magnetisme