


Sådan fungerer Crusher
 Knuser ubemandet jordkøretøj Foto høflighed Carnegie Mellon, National Robotics Engineering Center
Knuser ubemandet jordkøretøj Foto høflighed Carnegie Mellon, National Robotics Engineering Center Crusher debuterede i ægte monster-truck-stil:De to prototyper kom ind i en Carnegie Mellon University-bygning for at blære musik og blinkende lys. En knuser stod der, mens dens modpart fortsatte med at vælte og knuse bunker af biler, der ville få de fleste monstertrucks til at bakke op med halen mellem deres ben. Knuser er ingen typisk lastbil. Den kan køre lige over en 4 fods lodret væg, mens den bærer 8, 000 pund last.
Knuser er en ubemandet terrængående køretøj ( UGV ) finansieret af DARPA og designet af Carnegie Mellons National Robotics Engineering Center ( NREC ). Kraften i Crusher-projektet-som bygger på en anden NREC-designet UGV kaldet Spinner (Crusher kaldes undertiden Spinner version 2.0 )-er stort set drivkraften for al den militærfinansierede forskning og udvikling i UGV-verden lige nu:øget opfattelsesevne, autonomi og robusthed. Den amerikanske hær vil gerne få ting mere end en ubemandet, lydløs tank, der kan bære ubegrænset nyttelast, forsvare sig mod fjenden og fremskynde uhindret på tværs af terræn, der ville have Hummer krøllet sammen i fosterstilling.
Knuseren vil sandsynligvis aldrig se masseproduktion. Omkostningerne ville være for høje (designerne citerer ikke engang et tal). Det er designet som en fungerende prototype til at teste forskellige teknologier, NREC udvikler som en del af et program kaldet UPI .
UPI står for U nmanned Ground Combat Vehicle P erceptOR (off-road) jeg integration, en DARPA-finansieret mundfuld, der omfatter eksperimenter for at "vurdere mulighederne i stor skala, ubemandede terrængående køretøjer (UGV), der opererer autonomt i en lang række komplekser, off-road terræn "[ref]. 6,5 tons knuser vejer næsten 30 procent mindre end Spinner og kan bære mere gods. Det eneste NREC efterlod uden for Spinners opgradering er evnen til at blive ved med at køre, hvis den vendes på hovedet . Intet ord om, hvorfor den seje funktion forsvandt, selvom logikken antyder, at det enten var at gøre nogle af Crusher's andre opgraderede funktioner mulige eller at skære i en omkostningsevne, der muligvis ikke er afgørende for UPIs hovedopgave.
Så, hvad kan Crusher gøre?
- Det er et ubemandet køretøj, der primært er designet til rekognoscering og støtteroller, og manglen på et menneskeligt mandskab giver mulighed for nye tilgange til at skabe et robust, fleksibelt køretøj, der kan bære store nyttelaster. For eksempel, Knuser kan under visse omstændigheder opgive rustning, så den kan bære flere forsyninger.
- Ultimativt, Knuser vil være i stand til at navigere autonomt over ekstremt terræn komplet med grøfter, stenbarrierer og menneskeskabte forhindringer.
 Foto høflighed Carnegie Mellon, National Robotics Engineering Center
Foto høflighed Carnegie Mellon, National Robotics Engineering Center - Knuser kan køre på batteristrøm alene, muliggør næsten lydløs drift.
- Knuser kan bære våben, så det kan indtage kamproller ned ad linjen.
Ifølge NREC, Crusher's teknologi er seks til 10 år fra real-world implementering. Mens den er mindre, menneskestyrede robotter har allerede gjort det på slagmarken (se Hvordan militære robotter fungerer), massiv, ubemandede robotter som Crusher er stadig i laboratorier. Kompleksiteten af de opfattelses- og kontrolsystemer, der er nødvendige for en storstilet robot til at håndtere ukendt terræn og forhold, er stadig på forsknings- og udviklingsstadiet. Crusher's opfattelses- og navigationssystemer er prototyper beregnet som testplatforme for stadig mere innovative tilgange til terrænkøretøjer, der ikke kræver menneskeligt input for at udføre deres mission.
I det næste afsnit, vi tager et kig på nogle af disse systemer. Da Crusher først og fremmest er et militært projekt, komplette oplysninger er ikke tilgængelige for offentligheden, men HowStuffWorks har alligevel formået at finde ud af nogle interessante oplysninger.
Knuser teknologi
 Knuser prototyper Foto høflighed Carnegie Mellon, National Robotics Engineering Center
Knuser prototyper Foto høflighed Carnegie Mellon, National Robotics Engineering Center Der er tre primære fokusområder i Crusher's udvikling:
- robusthed at modstå ekstremt terræn uden at miste hastighed, selv når man bærer 8, 000 pund last
- stille bevægelse på slagmarken for at gøre det til et levedygtigt rekognosceringsaktiv
- autonom drift at give mulighed for spejdning, rekognoscering og endda bekæmpe roller uden at risikere et eneste menneskeliv
Knuserens skelet er lavet af aluminium og titanium. Dens skrog er et ramme i aluminium (en åben struktur af forbindelsesstænger) med ultra-robuste titaniumnoder, der forbinder stængerne for ekstra styrke i det sandsynlige tilfælde af kollisioner med store, hårde genstande. Umiddelbart under skroget er en glideplade - dybest set en ophængt, chokmonteret stål "kofanger", der står som et første forsvar, beskytter skroget mod første kontakt med lignende sten, træstubbe og trin.
 Foto høflighed Carnegie Mellon, National Robotics Engineering Center
Foto høflighed Carnegie Mellon, National Robotics Engineering Center For at holde det bevæger sig over forhindringer og generelt uvenligt terræn, Knuser har et sekshjulet hjul, firehjulstræk-system drevet af en hybrid diesel-elektrisk opsætning, der muliggør næsten lydløs betjening - en praktisk egenskab ved rekonstruktion. 78 hk, turbo-dieselmotor fungerer som en generator i systemet, afgiver en kontinuerlig 58 kilowatt (kW) strøm til at oplade Crusher's 300 volt, 18,7 kW, lithium-ion batteripakke. Batterierne kører igen seks 210-kW elektriske motorer, en placeret i hver af de seks hjulnav. Hver motor producerer 282 hestekræfter. Ligesom de fleste hybridelektriske systemer, Knuser gør brug af regenerativ bremsning for at returnere lidt strøm til batterierne hver gang det bremser (se hvordan hybridbiler fungerer for at lære om regenerativ bremsning). Køretøjet kan køre på lydløs batteristrøm alene i 3 til 16 km afhængigt af hastighed og lastbelastning.
Da hvert hjul er uafhængigt drevet, hvis en eller to dør, Knuser kan blive ved. Det behøver kun fire af de seks hjul for at bevare sine muligheder. Og hvis det pludselig har brug for en vending - sig, omgivet på tre sider af uoverkommelige barrierer - den kan bruge sin skridstyringsevne , en venderadius på nul, til hurtigt om-ansigt uden slingre overhovedet.
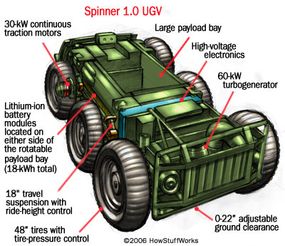
For at passe under lavt hængende forhindringer, stå over for stenet terræn eller hellere skjule sig for fjenden, Knuser har en justerbar kørehøjde på nul til 30 tommer (76 cm). Ud over højdejustering, Crusher's suspension kan rejse hele 30 inches for at absorbere stød, og den har justerbar stivhed til forskellige jordforhold. Vi var i stand til at finde en visning under hætten af Spinner, Crusher's forgænger - husk at Crusher er en opgraderet version af Spinner 1.0:
 Knuser har opgraderinger i justering af kørehøjde, affjedring, køretøjets vægt og lastkapacitet.
Knuser har opgraderinger i justering af kørehøjde, affjedring, køretøjets vægt og lastkapacitet. Knuserens kraftfulde ramme, sekshjulsdrevne opsætninger og ekstreme affjedringsfunktioner gør det muligt for UGV at køre med høje hastigheder, i øjeblikket op til 42 km / t, over vanskeligt terræn, står over for forhindringer som grøfter, kampesten, stejle skråninger og lodrette barrierer op til 4 fod, alt sammen uden at gå glip af et slag.
Robusthed, kraft og stilhed gør Crusher til et ideelt spejderværktøj, men det er først og fremmest UGV's autonomisystem, som DARPA hidtil har afsat 35 millioner dollars til at udvikle. NREC har ikke frigivet meget detaljerede oplysninger om UPI -systemet, men siger, at "denne teknologi spreder sanseevner på tværs af hele køretøjet for at hjælpe med at balancere dets opfattelse og også understøtte køretøjsområder, der måske er mindre dygtige til at fornemme miljøet. [sensing] -softwaren vil også lade Crusher 'lære' og anvende tidligere indsamlet information til nye forhindringer. "
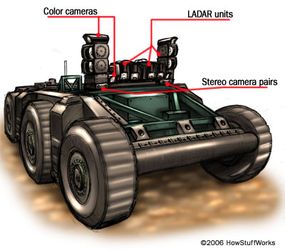
Vi ved godt, at opfattelseshardwaren hovedsageligt består af LADAR (laserdetektering og rækkevidde) enheder og kamera arrays . En LADAR -enhed sender en laserstråle ud for at scanne et område og måler, hvor lang tid det tager for strålen at blive reflekteret tilbage til enhedens lasersensor. Crusher har otte af disse enheder - fire scanner miljøet vandret og fire scanner lodret. Den bruger seks par stereokameraer til dybdeopfattelse og fire farvekameraer til at anvende en farvepixel til hvert afstandspunkt, der bestemmes af LADAR-sensoren.
 Tidlig version af Crusher's perception system
Tidlig version af Crusher's perception system Den seneste inkarnation af Crusher har en 18 fod teleskopmast til indsamling af data fra et højere udsigtspunkt. Masten kan indeholde dele af LADAR og kamerasamlingen set ovenfor, eller det kan ganske enkelt tilføje et ekstra sæt sensorer til opfattelsessystemet.
 Foto høflighed Carnegie Mellon, National Robotics Engineering Center
Foto høflighed Carnegie Mellon, National Robotics Engineering Center Med alle LADAR- og kameradata kombineret, Knuser indbygget CPU skaber et 3D-billede af landskabet, som Crusher færdes i. CPU'en er en 700 MHz Pentium 3, der styrer Crusher's mekaniske aktiviteter og kører navigationssoftwaren, der håndterer sensordatabehandling. An inertial måleenhed ( IMU ) registrerer Crusher's højde, position og bevægelsesretning ved hjælp af en kombination af accelerometre (vippesensorer) og gyroskoper, så Crusher er altid opmærksom på sin egen bevægelse og position i forhold til landskabet. UGV'en har også en indbygget GPS-modtager og computerbaseret GPS-database, der indeholder forprogrammerede terrændata.
Indtil nu, feltforsøg har vist, at Crusher er godt på vej til ægte autonomi. Ved testning, Knuser flyttede fra GPS -waypoint til GPS -waypoint med en afstand på mere end 1 km fra hinanden uden nogen som helst ekstern kontrol. Ved hjælp af sine opfattelses- og navigationssystemer, Knuser kan reagere på forhindringer på flugt - den behøver ikke en operatør til at fortælle den, hvad den skal gøre, når den rammer noget. Det kan klatre i en hældning større end 40 grader, kør lige over et 4-fods trin og kryds en 80-tommer skyttegrav ved hjælp af sine egne beslutningstagningsmuligheder. Grøftens krydsningsevne er især cool - Knuserens dæk er monteret på en sådan måde, at de kan falde ned for at understøtte køretøjet, mens det krydser et hul.
 Foto høflighed Carnegie Mellon, National Robotics Engineering Center
Foto høflighed Carnegie Mellon, National Robotics Engineering Center Knuser Specs :
- tom bilvægt :13, 200 lbs (5, 990 kg)
- maksimal nyttelast :8, 000 lbs (3, 600 kg)
- længde :201 tommer (510 cm)
- bredde :102 tommer (260 cm)
- højde (ved 16 tommer/41 cm frihøjde):60 tommer (152 cm)
- frihøjde :0 til 30 tommer (76 cm)
- dækdiameter :49,5 tommer (125,7 cm)
- tophastighed :26 mph (42 km / t) på mindre end 7 sekunder
- nyttelastmængde (i to interne bugter):57,7 kubikfod (1,6 kubikmeter)
- mulige kontrolmåder :fjernbetjening waypoint-baseret navigation fuld autonomi
Størrelsen og vægtspecifikationerne betyder, at et enkelt C-130H-fragtfly kan føre to knusere i kamp overalt i verden. Fra august 2006, Crusher er udstyret med et Rafael Mini Typhoon -beslag, der rummer et rifle på 0,50 kaliber, peger på muligheden for, at kamproller kan blive et stadig mere fremtrædende fokus i udviklingen af autonomi teknologi til militære køretøjer. I det næste afsnit, Vi tager et kig på fremtiden for Crusher -prototypen og finder ud af, hvordan den passer ind i den overordnede trend inden for militær forskning og udvikling.
Knuserens fremtid
 Foto høflighed Carnegie Mellon, National Robotics Engineering Center
Foto høflighed Carnegie Mellon, National Robotics Engineering Center Fra 2006, det amerikanske militær har indsat cirka 4, 000 kamprobotter til aktiv tjeneste. Militæret bruger disse robotter primært til at "snuse ud" bomber og rydde bygninger og andre lukkede strukturer. Hærens Fremtidige kampsystemer ( FCS ) -programmet ønsker at bruge omkring $ 300 millioner til at finansiere opdateringer til at udvide rollerne som slagmarkens robotter. FCS søger robotte muldyr, der kan transportere last sammen med tropper over ujævnt terræn og meget større ubemandede køretøjer, der kan operere uden menneskeligt input til spejderområder og patruljerende grænser, sende vigtige data tilbage til tropper. Hvis disse store, autonome køretøjer kan også bære enorme nyttelast over vanskeligt terræn uden at miste hastighed, det ville være en ekstra bonus. Knuser eller noget lignende ville være ideelt i sidstnævnte roller.
Crusher selv vil sandsynligvis ikke se implementering. Det er for det meste et forskningsprojekt og vil være i test og eksperimenter indtil 2008. På det tidspunkt, NREC vil overføre Crusher -teknologien til DARPA, så den kan anvendes på relaterede projekter, hvoraf de fleste hører under domænet Future Combat System. FCS kører udviklingsprogrammer som Armed Reconnaissance Vehicle (ARV), som har til formål at realisere en fuldstændig autonom, kampklar køretøj til rekognosceringsmissioner; og det autonome navigationssystem (ANS), et overordnet program til at udvikle fælles platform autonomi kapaciteter til en lang række militære robotter. Det overordnede mål for FCS er problemfri integration af både bemandede og ubemandede køretøjer, jord og luft, ind i en struktur, der kan styres via en enkelt, web-lignende kontrolsystem.
I form af FCS, vi kan se Crusher-lignende køretøjer, der støtter tropper i kampoperationer om fem til 10 år. De vil sandsynligvis starte i rekognosceringsroller og derefter gå over i kamp, støtte tropper i modsætning til at erstatte dem. Men Crusher's banebrydende autonomi-teknologi er ikke militærspecifik. NREC forestiller sig - og har i værkerne - forskningsprojekter, der udnytter de systemer, der er udviklet til Crusher i civile applikationer. I et årti, vi kunne se autonome køretøjer udføre risikable opgaver på områder som landbrug, minedrift og byggeri, i sidste ende overføre noget af den fare, som mennesker står over for på disse felter, til udskiftelige robot -modstykker, der ikke føler nogen smerte.
For mere information om knuser, UGV'er og relaterede emner, tjek linkene på den næste side.
Masser mere information
Relaterede HowStuffWorks -artikler
- Sådan fungerer Bradley Fighting Vehicles
- Hvordan Future Force Warrior vil fungere
- Sådan fungerer M1 -tanke
- Sådan fungerer militære robotter
- Sådan fungerer Predator UAV
Flere store links
- DARPA:DARPA's LAGR -program
- Defense Tech:DARPA's Smart, Betyde, Off-road drone
- Elektronisk design:Knuser lader videre til slagmarken - helt alene
- National Robotics Engineering Center:Crusher
- National Robotics Engineering Center:UGCV PerceptOR Integrated (UPI)
Kilder
- Boyle, Alan. "Robotic Crusher har sin kommende fest." MSNBC.com. 28. april kl. 2006. http://www.msnbc.msn.com/id/12463820/
- "Carnegie Mellons National Robotics Engineering Center afslører futuristiske ubemandede terrænkøretøjer." Carnegie Mellon University. 28. april kl. 2006. http://www.rec.ri.cmu.edu/projects/crusher/Crusher_Press_Release.pdf
- "Knuser." National Robotics Engineering Center, Carnegie Mellon University. http://www.rec.ri.cmu.edu/projects/crusher/index.htm
- Knuser Brochure. Carnegie Mellon:Robotics Institute. http://www.rec.ri.cmu.edu/projects/crusher/Crusher_Brochure.pdf
- "Knuser ubemandet jordkampkøretøj afsløret." Army News Service. 4. maj kl. 2006. http://www4.army.mil/ocpa/print.php?story_id_key=8962
- "DARPA er smart, Betyde, Off-road drone. "Defense Tech. Http://www.defensetech.org/archives/002367.html
- Erwin, Sandra I. "Næste generations robotter:større og bedre?" Nationalt forsvar. Juli 2006. http://www.nationaldefensemagazine.org/issues/2006/July/NextGenerationRobots.htm
- "FCS ubemandede terrængående køretøjer." GlobalSecurity.org. http://www.globalsecurity.org/military/systems/ground/fcs-ugv.htm
- Gawel, Richard. "Knuser løber videre til slagmarken - helt af sig selv." Elektronisk design. http://www.elecdesign.com/Articles/ArticleID/12678/12678.html
- Jackel, Larry. "DARPA's LAGR- og UPI -programmer." DARPA. http://www.laas.fr/IFIPWG/Workshops&Meetings/49/workshop/06%20jackel.pdf
- Piquepaille, Roland. "Nye teknologitrender." ZDNet -blogs. http://blogs.zdnet.com/emergingtech/?p=214
- "UGCV PerceptOR Integrated (UPI)." National Robotics Engineering Center, Carnegie Mellon University. http://www.rec.ri.cmu.edu/projects/upi/index.htm
Sidste artikelHvordan virker flydende sprængstof?
Næste artikelHvordan fremtidige kampsystemer vil fungere
 Varme artikler
Varme artikler
-
 Sådan fungerede World Trade CenterWorld Trade Centers Twin Towers var ægte originaler - deres historie er en innovation, vedholdenhed og store ideer. Se flere smukke skyline -billeder. Foto høflighed Glass, Stål og sten Når vi ser ti
Sådan fungerede World Trade CenterWorld Trade Centers Twin Towers var ægte originaler - deres historie er en innovation, vedholdenhed og store ideer. Se flere smukke skyline -billeder. Foto høflighed Glass, Stål og sten Når vi ser ti -
 Dette er grunden til, at Fortnite er så vanedannendeOnline videospil Fortnite lancerede sin nye sæson i sidste uge, og hvis du har brugt timer og timer på at udforske den nye sneklædte biome og flyve rundt i fly, er du ikke alene. Ikke kun spiller (
Dette er grunden til, at Fortnite er så vanedannendeOnline videospil Fortnite lancerede sin nye sæson i sidste uge, og hvis du har brugt timer og timer på at udforske den nye sneklædte biome og flyve rundt i fly, er du ikke alene. Ikke kun spiller ( -
 Trump beskyldte skovforvaltningen for dødbringende brande i Californias - men han var forkertCalifornien er blevet ødelagt af ildebrande i år - og de brande, der forekommer i det sydlige, nordlige og centrale Californien, er de dødeligste i statens historie med en statsomfattende dødstal p
Trump beskyldte skovforvaltningen for dødbringende brande i Californias - men han var forkertCalifornien er blevet ødelagt af ildebrande i år - og de brande, der forekommer i det sydlige, nordlige og centrale Californien, er de dødeligste i statens historie med en statsomfattende dødstal p -
 Kan spiselige madpakkere løse den plastiske krise?Forestil dig snackingens fremtid: Du griber en ostepind. Når du er færdig, kan du spise dets indpakning af mælkeprotein og undgå at skabe noget skrald. Derefter rækker du efter en kop æblejuice. Nå
Kan spiselige madpakkere løse den plastiske krise?Forestil dig snackingens fremtid: Du griber en ostepind. Når du er færdig, kan du spise dets indpakning af mælkeprotein og undgå at skabe noget skrald. Derefter rækker du efter en kop æblejuice. Nå