


ESAs force-feedback-rover kontrolleret fra en nation væk

En controller i Tyskland betjente ESA's griber-udstyrede Interact-rover omkring et simuleret månelandskab ved agenturets tekniske hjerte i Holland, at øve sig på at hente geologiske prøver. Kredit:ESA– SJM Photography
En controller i Tyskland betjente ESA's gripper-udstyrede Interact rover rundt i et simuleret månelandskab ved agenturets tekniske hjerte i Holland, at øve sig på at hente geologiske prøver. På samme tid interagerede en mindre tysk-baseret rover med ESA's rover, som om den var sammen på samme sted - i en generalprøve for en robottestkampagne til Etnas månelignende vulkanskråninger, planlagt til næste år.
Scenariet bag denne uges test er, at i fremtiden, astronauter ombord på Lunar Gateway i rummet vil være i stand til at betjene rovere på Månens overflade, ved hjælp af force-feedback-kontroller – som et avanceret gaming-joystick, der skubber tilbage på sin bruger – for at opleve en realistisk berøringssans, der kan sammenlignes med at være der.
Konceptet blev principielt bevist under sidste års Analog-1 kampagne, udført af ESA's Human Robot Interaction Laboratory, med støtte fra DLR German Aerospace Centers Institut for Robotik og Mekatronik i Oberpfaffenhofen nær München.
Analog-1 sluttede med ESA-astronaut Luca Parmitano i kredsløb ombord på den internationale rumstation, der opererer Interact-roveren på jorden, styret af high-fidelity vision og berøring for at udføre en geologisk prøvetagningsøvelse.
"Vores oprindelige plan var at følge op på Analog-1 med en ægte geologisk feltundersøgelse, på Etna i Italien, " forklarer ESA robotingeniør Thomas Krueger, leder HRI Lab.
"Denne undersøgelse var planlagt som en del af DLR's ARCHES—Autonomous Robotic Networks to Help Modern Societies—initiativ, at udvikle heterogene, autonome og indbyrdes forbundne robotsystemer i sammenhæng med en reel applikation."

En controller i Tyskland betjente ESA's griber-udstyrede Interact-rover omkring et simuleret månelandskab ved agenturets tekniske hjerte i Holland, at øve sig på at hente geologiske prøver. Roveren har to kameraer, den ene monteret på en manøvredygtig arm og den anden på griberen for enden af en anden arm. Kredit:ESA – SJM Photography
"Desværre gør de igangværende COVID-19-restriktioner dette umuligt for nu. I stedet havde vi ideen om at bringe roverne sammen på virtuel basis:vi opretter en fælles netværksinfrastruktur for at få dem til at tro, at de er sammen, selvom de ikke er - som en robotversion af en telekonference - for at være en generalprøve i fuld skala for vores Mount Etna-tur, som nu er blevet flyttet til næste sommer."
Testen kulminerede i, at Interact-roveren blev betjent i fællesskab fra DLR mere end 660 km væk, sammen med European Space Operations Centre, ESOC, i Darmstadt, Tyskland, hjælpe med at udvælge og hente geologiske prøver – overvåge aktiviteterne i 'rummet'.
"Denne slags eksperimenter er meget vigtige for os for at øve os og få operationserfaring, som er afgørende for ESA's fremtidige robot-månemissioner, " fastslår ESOCs driftsingeniør Thorsten Graber.
Vedtagelse af rollen som missionskontrol, ESOC-siden brugte styrings- og visualiseringsværktøjer på højere niveau udviklet af Trasys-virksomheden.

En controller i Tyskland betjente ESA's griber-udstyrede Interact-rover omkring et simuleret månelandskab ved agenturets tekniske hjerte i Holland, at øve sig på at hente geologiske prøver. Kredit:ESA – SJM Photography
"Vores rover har to kameraer, den ene monteret på en manøvrebar arm og den anden på griberen for enden af en anden arm, " forklarer ESA's robotingeniør Edmundo Ferreira.
"Denne griber styres ved hjælp af en Sigma 7 force-feedback-enhed med seks frihedsgrader, giver operatøren mulighed for at mærke, når dens arm støder på jorden eller samler en sten op. Faktisk, den enhed, der blev brugt hos DLR, er flyreserven til den force-feedback-enhed, som Luca brugte sidste år, modificeret til rummet af Thales Alenia Space.
"Når det bruges i rummet for alvor, 'latency' - eller signalforsinkelse - vil helt sikkert være et problem, så vi har eksperimenteret for at se, hvordan brugere reagerer på stigende niveauer af forsinkelse mellem en kommando, der bliver givet, og roverarmen reagerer."
Denne test er den seneste i rækken af gradvist mere udfordrende menneske-robot-testkampagner, samlet kaldet Meteron—Multi-purpose End-to-End Robotic Operation Network.
-

En controller i Tyskland betjente ESA's griber-udstyrede Interact-rover omkring et simuleret månelandskab ved agenturets tekniske hjerte i Holland, at øve sig på at hente geologiske prøver. En controller i European Space Operations Centre, ESOC, i Darmstadt, , Tyskland, hjulpet med at udvælge og hente geologiske prøver – overvåge aktiviteterne i 'rummet'. Kredit:ESA
-

En controller i Tyskland betjente ESA's griber-udstyrede Interact-rover omkring et simuleret månelandskab ved agenturets tekniske hjerte i Holland, at øve sig på at hente geologiske prøver. Kredit:ESA
"Vores arbejde har altid fokuseret på at muliggøre fjernbetjening, men på grund af COVID-19-pandemien har vores team været nødt til at øve fjernarbejde blot for at gøre denne testkampagne mulig, " tilføjer Thomas.
"Så mens vi har samarbejdet online om at udvikle kontrolsoftware, typisk har kun en enkelt ingeniør arbejdet i laboratoriet på én gang, med telefon- og onlinesupport fra os andre. I mellemtiden blev kontrolanordninger betjent derhjemme, at øve sig i at betjene robotsystemer i laboratoriet."
Selve Interact-roveren er i gang med at opgradere, herunder tilføjelse af støvbeskyttelse til dets arme og elektronik, som forberedelse til næste års Etna-tur.
 Varme artikler
Varme artikler
-
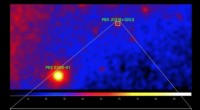 FASTs første opdagelse af en millisekundspulsarGamma-ray-himmelkortet og integrerede pulsprofiler for den nye MSP:Øverste panel viser området af gamma-ray-himlen, hvor den nye MSP er placeret. Nederste panel a) viser de observerede radioimpulser i
FASTs første opdagelse af en millisekundspulsarGamma-ray-himmelkortet og integrerede pulsprofiler for den nye MSP:Øverste panel viser området af gamma-ray-himlen, hvor den nye MSP er placeret. Nederste panel a) viser de observerede radioimpulser i -
 GRACE-FO rumfartøj klar til opsendelseFalcon 9-raketten, der bærer GRACE-FO tvillingesatellitterne, blev hævet til den lodrette opsendelsesposition i aften ved Space Launch Complex 4E, Vandenberg Air Force Base, Californien. Liftoff er pl
GRACE-FO rumfartøj klar til opsendelseFalcon 9-raketten, der bærer GRACE-FO tvillingesatellitterne, blev hævet til den lodrette opsendelsesposition i aften ved Space Launch Complex 4E, Vandenberg Air Force Base, Californien. Liftoff er pl -
 Anæmisk stjerne bærer præg af sin gamle forfaderKredit:CC0 Public Domain En nyopdaget gammel stjerne, der indeholder en rekordlav mængde jern, bærer vidnesbyrd om en klasse af endnu ældre stjerner, længe antaget, men antaget at være forsvundet.
Anæmisk stjerne bærer præg af sin gamle forfaderKredit:CC0 Public Domain En nyopdaget gammel stjerne, der indeholder en rekordlav mængde jern, bærer vidnesbyrd om en klasse af endnu ældre stjerner, længe antaget, men antaget at være forsvundet. -
 Snesevis af ultrakompakte dværggalakser opdagetUCD/GCer omkring de lyseste galakser i Fornax-hoben. Kredit:Saifollahi et al., 2021. Astronomer fra University of Groningen og andre steder har identificeret 44 nye ultrakompakte dværggalakser (UC
Snesevis af ultrakompakte dværggalakser opdagetUCD/GCer omkring de lyseste galakser i Fornax-hoben. Kredit:Saifollahi et al., 2021. Astronomer fra University of Groningen og andre steder har identificeret 44 nye ultrakompakte dværggalakser (UC
- AI kan være en kraft til det gode - men var i øjeblikket på vej mod en mørkere fremtid
- Matematiker foreslår en metode til at forenkle den matematiske model for stofoverførsel gennem en …
- Hvad er virkningerne af frostvæske på miljøet?
- Temperaturkontrol, maskerer ny norm for Amazon-ansatte
- Jobs for the boys:Hvordan børn giver stemme til kønsstereotype jobroller
- Magnetar SGR J1935+2154 undersøgt i detaljer