


Forenkling af bløde robotter

denne nye, forenklet blød robot, drevet af trykluft, erstatter flere styresystemer med én indgang, reducere antallet, vægt og kompleksitet af de komponenter, der er nødvendige for at drive enheden. Kredit:Bertoldi Lab/Harvard SEAS
En blød robot udviklet af forskere fra Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) kunne bane vejen for helt ubundne robotter til udforskning af rummet, eftersøgnings- og redningssystemer, biomimetik, medicinsk kirurgi, genoptræning og mere.
denne nye, forenklet blød robot, drevet af trykluft, erstatter flere styresystemer med én indgang, reducere antallet, vægt og kompleksitet af de komponenter, der er nødvendige for at drive enheden.
"Før denne forskning, vi kunne ikke bygge flydende bløde robotter uden uafhængigt at kontrollere hver aktuator gennem separate inputledninger og trykforsyninger og en kompleks aktiveringsproces, sagde Nikolaos Vasios, en kandidatstuderende ved SEAS og første forfatter af papiret. "Nu, vi kan integrere funktionaliteten af flydende bløde robotter i deres design, giver mulighed for en væsentlig forenkling i deres aktivering."
Undersøgelsen blev offentliggjort i Blød robotik .
For at forenkle de bløde robotter, forskerne udnyttede væskens viskositet, som er et mål for modstanden af en væske, der bevæger sig gennem en genstand. Forestil dig, at vand bevæger sig gennem et sugerør – jo tyndere er halm, jo sværere er det for vand at passere igennem. Ved at bruge dette princip, forskerne, ledet af Katia Bertoldi, William og Ami Kuan Danoff professor i anvendt mekanik ved SEAS, omhyggeligt udvalgte rør i forskellige størrelser for at kontrollere, hvor hurtigt luften bevæger sig gennem enheden. En enkelt indgang pumper den samme mængde luft gennem et af rørene, men størrelsen på rørene bestemmer hvordan og hvor luften strømmer.
Holdet udviklede en ramme, der automatisk bestemmer, hvordan en blød robot skal laves, hvordan rørene skal vælges og hvordan de skal aktiveres for at opnå en målfunktion, såsom kravle eller gå, med en enkelt indgangslinje.
De demonstrerede tilgangen på en firbenet, blød robot. Rørene, indlejret i toppen af robotten, ledede luften til hvert ben i rækkefølge, gør det muligt for robotten at kravle.
"Vores arbejde præsenterer for første gang en strategi, der kan bruges til at lave simpelt aktiverede flydende bløde robotter, baseret på dette velkendte fænomen med viskøs flow, sagde Bertoldi, som også er Associate Faculty ved Wyss Institute ved Harvard University. "Med den strategi, vi præsenterer i vores arbejde, aktiveringen af fluidiske bløde robotter vil nu være enklere og lettere end nogensinde, tage et stort skridt mod fuldstændig ubundne og simpelthen aktiverede bløde robotter. "
Sidste artikelEn fodprotese, der tackler hårdt terræn
Næste artikelSømme digitale forfalskninger med AI-lærte artefakter
 Varme artikler
Varme artikler
-
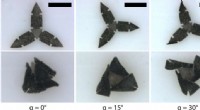 Ingen samling nødvendig:Forskere automatiserer mikrorobotiske designsBilleder set ovenfra af de tri-arm bløde magnetiske strukturer, der bærer forskellige magnetiseringsprofiler. Kredit:Xu et al., Sci. Robot. 4, eaav4494 (2019) Montering af en mikrorobot, der pleje
Ingen samling nødvendig:Forskere automatiserer mikrorobotiske designsBilleder set ovenfra af de tri-arm bløde magnetiske strukturer, der bærer forskellige magnetiseringsprofiler. Kredit:Xu et al., Sci. Robot. 4, eaav4494 (2019) Montering af en mikrorobot, der pleje -
 United Airlines:Ingen Boeing 737 MAX-flyvninger denne sommerUnited Airlines ledere sagde, at de er opmuntrede af den mere realistiske tidsramme for at returnere Boeing 737 MAX til skyerne United Airlines vil holde Boeing 737 MAX ude af drift i endnu længer
United Airlines:Ingen Boeing 737 MAX-flyvninger denne sommerUnited Airlines ledere sagde, at de er opmuntrede af den mere realistiske tidsramme for at returnere Boeing 737 MAX til skyerne United Airlines vil holde Boeing 737 MAX ude af drift i endnu længer -
 Forskere skaber biologisk nedbrydelige, papirbaserede biobatterierForskere ved Binghamton University, State University i New York har skabt en biologisk nedbrydelig, papirbaseret batteri, der er mere effektivt end tidligere muligt. Kredit:Seokheun Sean Choi Frem
Forskere skaber biologisk nedbrydelige, papirbaserede biobatterierForskere ved Binghamton University, State University i New York har skabt en biologisk nedbrydelig, papirbaseret batteri, der er mere effektivt end tidligere muligt. Kredit:Seokheun Sean Choi Frem -
 Et bæredygtigt svar på industriel forurening? Det er bananer!Rizki Prasetyaningtya, venstre, og Saskia Putri fik deres klassekammerater, professorer og alle de kendte for at spise bananer og appelsiner, så de ville have nok skræl til deres forskning. Heldigvis
Et bæredygtigt svar på industriel forurening? Det er bananer!Rizki Prasetyaningtya, venstre, og Saskia Putri fik deres klassekammerater, professorer og alle de kendte for at spise bananer og appelsiner, så de ville have nok skræl til deres forskning. Heldigvis
- Sådan huskes gennemsnit, median og tilstand
- Forskere skaber billede af svag brintbinding ved hjælp af AFM
- Forbedring af motorydelse og brændstofeffektivitet
- Nyt setup til elektriske målinger med høj gennemstrømning af kvantematerialer og -enheder
- Hvordan sammenligner planter sig med solceller, når det kommer til opsamling af solenergi?
- Klimaændringer truer unikke permafrostlandformer