


Ingen samling nødvendig:Forskere automatiserer mikrorobotiske designs
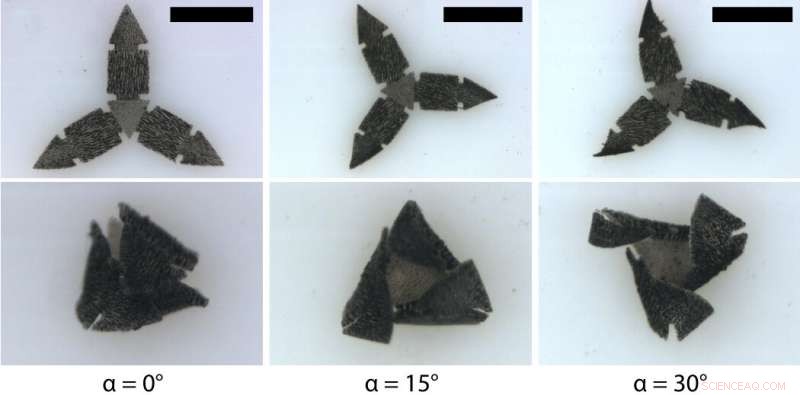
Billeder set ovenfra af de tri-arm bløde magnetiske strukturer, der bærer forskellige magnetiseringsprofiler. Kredit:Xu et al., Sci. Robot. 4, eaav4494 (2019)
Montering af en mikrorobot, der plejede at kræve et par nåle-næse pincet, et mikroskop, faste hænder og mindst otte timer. Men nu har University of Toronto Engineering forskere udviklet en metode, der kun kræver en 3D-printer og 20 minutter.
I laboratoriet til professor Eric Diller, forskere opretter magnetiserede mikrorobotter-på størrelse med hovedet på en nål-der kan rejse gennem væskefyldte kar og organer i menneskekroppen. Diller og hans team styrer bevægelsen af disse mikrorobotter trådløst ved hjælp af magnetfelter.
Hver mikrorobot er bygget ved præcist at arrangere mikroskopiske sektioner af magnetiske nåle oven på en flad, fleksibelt materiale. Når den blev indsat, forskerne anvender magnetfelter for at få mikrorobotter til at rejse med ormlignende bevægelse gennem væskekanaler, eller luk sine bittesmå mekaniske 'kæber' for at tage en vævsprøve.
"Disse robotter er ret vanskelige og arbejdskrævende at fremstille, fordi processen kræver præcision, "siger kandidatstuderende, Tianqi Xu. "Også på grund af behovet for manuel montering, det er sværere at gøre disse robotter mindre, hvilket er et stort mål for vores forskning. "
Derfor udviklede Xu og hans laboratoriekammerater en automatiseret tilgang, der reducerer design- og udviklingstiden betydeligt, og udvider de typer af mikrorobotter, de kan fremstille. Deres resultater blev offentliggjort i dag i Science Robotics .
Mindre og mere komplekse mikrorobotter er nødvendige for fremtidige medicinske applikationer, såsom målrettet levering af lægemidler, assisteret befrugtning, eller biopsier.
"Hvis vi tog prøver i urinvejene eller i væskehulerne i hjernen - forestiller vi os, at en optimeret teknik ville være med til at nedskalere kirurgiske robotværktøjer, «siger Diller.
For at demonstrere mulighederne i deres nye teknik, forskerne udtænkte mere end 20 forskellige robotformer, som derefter blev programmeret til en 3D-printer. Printeren bygger og størkner derefter designet, orientering af de magnetisk mønstrede partikler som en del af processen.
-
MASc -studerende Tianqi Xu holder en mikrorobot, der blev fremstillet ved hjælp af deres automatiserede system. Kredit:Liz Do, U af T Engineering
-
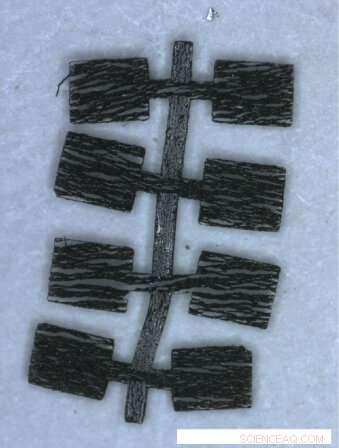
Den padle-kravlende magnetiske robot. Kredit:Xu et al., Sci. Robot. 4, eaav4494 (2019)
-
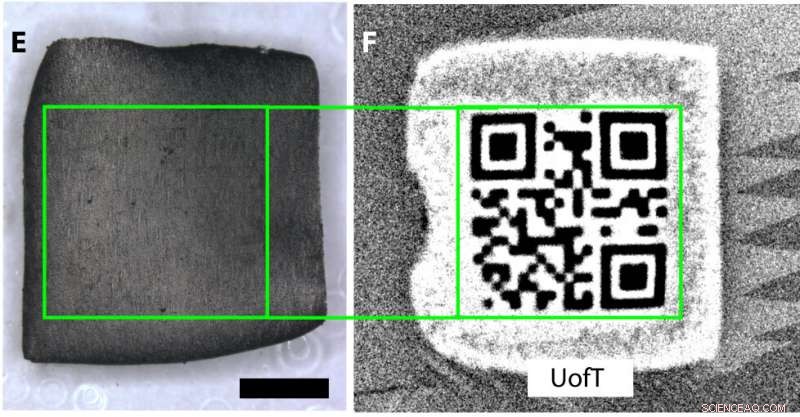
Som et bevis på, at deres metode kan bruges til at magnetisere bløde polymerer i lille skala, forskerne kodede magnetisk en QR -kode med klart definerede grænser og skarpe kanter i et område på 5 mm × 5 mm på et ark polymer. Kredit:Xu et al., Sci. Robot. 4, eaav4494 (2019)
"Tidligere har vi ville forberede en form og designe den manuelt, bruge uger på at planlægge det, før vi kunne fremstille det. Og det er bare en form, "siger Diller." Så når vi bygger det, vi ville uundgåeligt opdage specifikke særheder - f.eks. vi bliver muligvis nødt til at finjustere det for at være lidt større eller tyndere for at få det til at fungere. "
"Nu kan vi programmere formerne og klikke på udskriv, "tilføjer Xu." Vi kan gentage, designe og finpudse det let. Vi har magten til virkelig at udforske nye designs nu. "
Forskernes optimerede tilgang åbner dørene for at udvikle endnu mindre og mere komplekse mikrorobotter end den nuværende millimeterstørrelse. ”Vi synes, det er lovende, at vi en dag kunne gå 10 gange mindre, «siger Diller.
Dillers laboratorium planlægger at bruge den automatiserede proces til at udforske mere sofistikerede og komplicerede former for mikrorobotter. "Som et robotforskningsfællesskab, der er behov for at udforske dette rum med små medicinske robotter, "tilføjer Diller." At kunne optimere designs er et virkelig kritisk aspekt af, hvad feltet har brug for. "
Sidste artikelTesla ramte med stort tab, da billeverancer sputter
Næste artikelTager en slikning og bliver ved med at gemme
 Varme artikler
Varme artikler
-
 USA afbryder russisk botnet på 500, 000 hackede routereDet amerikanske justitsministerium beslaglægger VPNFilter botnet oprettet af en hackergruppe, der på forskellige måder kaldes APT28, Pandestorm, Sandorm, Fancy Bear og Sofacy Group Det amerikanske
USA afbryder russisk botnet på 500, 000 hackede routereDet amerikanske justitsministerium beslaglægger VPNFilter botnet oprettet af en hackergruppe, der på forskellige måder kaldes APT28, Pandestorm, Sandorm, Fancy Bear og Sofacy Group Det amerikanske -
 Passagerfly har brug for nok kabinepersonale til at betjene alle udgange i en nødsituationKabinepersonale kan være livreddere i enhver nødsituation. Kredit:Shutterstock/ChameleonsEye Nedstyrtningen af Aeroflot -flyet SU1492 i Moskva skaber bekymring for kabinesikkerheden med hensyn t
Passagerfly har brug for nok kabinepersonale til at betjene alle udgange i en nødsituationKabinepersonale kan være livreddere i enhver nødsituation. Kredit:Shutterstock/ChameleonsEye Nedstyrtningen af Aeroflot -flyet SU1492 i Moskva skaber bekymring for kabinesikkerheden med hensyn t -
 Hvordan du skriver med din smartphone kan afsløre din alder – her er grunden til, at det er vigtigtIndtastning med to tommelfingre. Kredit:Shutterstock Når computere rammer mainstream, den ældre fyr på kontoret ville altid blive fniset af, når han bankede på sit QWERTY-tastatur, kun at bruge si
Hvordan du skriver med din smartphone kan afsløre din alder – her er grunden til, at det er vigtigtIndtastning med to tommelfingre. Kredit:Shutterstock Når computere rammer mainstream, den ældre fyr på kontoret ville altid blive fniset af, når han bankede på sit QWERTY-tastatur, kun at bruge si -
 Microsoft medstifter, Filantropen Paul Allen dør 65 år gammelI denne 31. dec. 2017 foto, Seattle Seahawks-ejer Paul Allen står tæt på banen før en NFL-fodboldkamp mod Arizona Cardinals i Seattle. Allen, som grundlagde Microsoft sammen med sin barndomsven Bill G
Microsoft medstifter, Filantropen Paul Allen dør 65 år gammelI denne 31. dec. 2017 foto, Seattle Seahawks-ejer Paul Allen står tæt på banen før en NFL-fodboldkamp mod Arizona Cardinals i Seattle. Allen, som grundlagde Microsoft sammen med sin barndomsven Bill G
- Hvordan udvindes guld fra guldmalm?
- På Tarragona kysten, 57 % af plastikaffaldet er tøjfibre fra vaskemaskiner
- Glitrende strande:Cypern har det reneste vand i EU
- Varmebaseret teknik tilbyder en ny måde at måle mikroskopiske partikler på
- For at værdsætte dens kraft, tænk på design som et lægemiddel
- Sådan monteres et kredsløbskort i en elektronisk projektboks