


NASA robottankningsmission afgår fra stationen
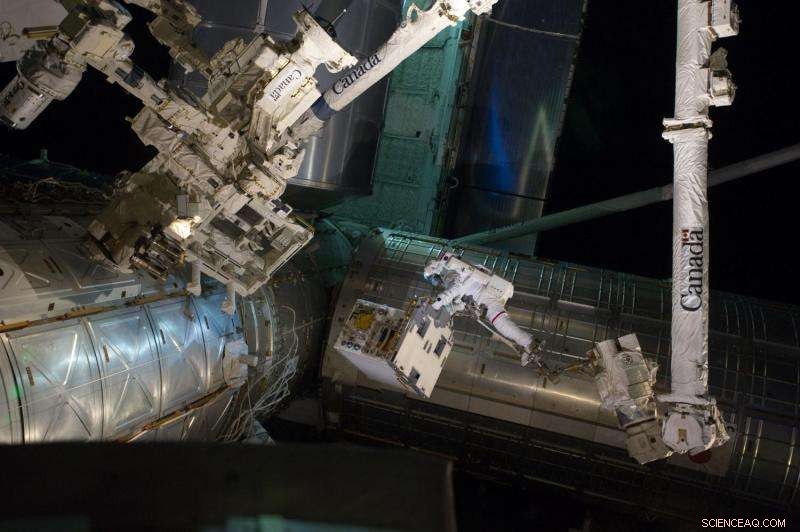
Astronaut Mike Fossums rumvandring for Robotics Refueling Mission Payload den 12. juli, 2011. Kredit:NASA
Den Internationale Rumstation fungerer som et kredsløbstest- og demonstrationslaboratorium for videnskabelige eksperimenter, der skal udføres i og uden for rumstationen. Eksperimenterne er i sagens natur forbigående med typiske livscyklusser på omkring et til fem år. Når deres testmål er nået, de fjernes for at gøre plads til nye eksperimenter.
Den 19. feb. et NASA-eksperiment - et testmodul kaldet Raven - blev med succes lanceret på SpaceX-10/Dragon og installeret på ydersiden af stationen, hvor den vil teste autopilotteknologier til rumfartøjer. Da Raven-nyttelasten satte sig på stationen, endnu en oprettelse af Satellite Servicing Projects Division (SSPD) – Robotic Refueling Mission (RRM) nyttelasten, afgået. Ombord på dragestammen, hvori Raven ankom, RRM kom tilbage til Jorden den 19. marts, hvor det kom ind i atmosfæren igen. Selvom begge nyttelaster var og er afgørende for fremme af satellitservice, efter at RRM tjente sit formål og nåede sine mål, det var tid for RRM at forlade stationen og gøre plads til nye eksperimenter.
RRM har etableret en solid arv i at demonstrere satellitservicefunktioner, og at on-orbit servicering er teknologisk klar til implementering. RRM blev opsendt i juli 2011 ombord på den sidste rumfærgeflyvning og var den sidste nyttelast, der blev fjernet fra rumfærgens lastrum af en astronaut. Det blev efterfølgende monteret udenfor på en Express Logistics Carrier bygget ved NASAs Goddard Space Flight Center i Greenbelt, Maryland. RRM demonstrerede og testede værktøjerne, teknologier og teknikker, der er nødvendige for at optanke og reparere satellitter i rummet, som ikke er designet til at blive serviceret.
Robotic Refueling Mission var en vigtig bro mellem den bemandede servicering udført i Hubble Service Missions og robotservice, der vil blive demonstreret i den kommende Restore-L-mission, " sagde Ben Reed, vicedivisionsdirektør for SSPD. "Vores team arbejdede meget hårdt for at udvikle pakken af RRM-værktøjer og -eksperimenter og er ekstremt glade for at se, hvad de har opnået. Vi er ivrige efter at anvende erfaringerne fra RRM til Restore-L-missionen såvel som fremtidige servicebestræbelser."
Året var 2010, hvor planlægningen af RRM begyndte. Den fjerde Hubble Space Telescope-servicemission var netop afsluttet. Rumfærgen var i skumringen af sin karriere, planlagt til pensionering i 2011. De hundredvis af ingeniører hos Goddard, der havde støttet servicering af Hubble, var ikke sikre på, hvad en fremtid uden shuttle ville bringe. Et hold, ledet af "servicens fader" Frank Cepollina, begyndte at brainstorme, hvordan man fortsætter med at servicere uden shuttle. Uden tid at spilde, Cepollinas team fastslog, at fremtidens service ville afhænge af robotteknologi, og rumstationens robotarm var den bedste mekanisme til at teste og udvikle robotserviceteknikker. Atten måneder senere - ekstremt hurtigt for et projekt af denne kompleksitet - var RRM i lastrummet på rumfærgen Atlantis, klar til at lancere og demonstrere for verden, at robotservice var blevet myndig.
"Rumstationen er i kredsløb og har allerede en robot, " sagde Frank Cepollina, den tidligere associerede direktør for SSPD. "Rumstationen var skræddersyet til RRM og fungerede smukt som testbed til servicering."
RRM-nyttelasten på størrelse med vaskemaskinen indeholdt fire unikke værktøjer, der blev brugt af stationens dobbeltarmede canadiske "Dextre"-robot til at opnå det præcise, komplekse opgaver, der er nødvendige for at tanke en satellit. Disse opgaver omfattede skæring og afprøvning af termiske tæpper, skrue flere hætter af, adgang til ventiler og overførsel af et simuleret satellitbrændstof. I januar 2013 med denne væskeoverførsel i rummet, RRM bekræftede, at nutidens robotteknologi kunne tanke en tredobbelt forseglet satellitbrændstofventil, overførsel af 1,7 liter ethanol.
I separate lanceringer i 2013 og 2014, to nye opgavetavler og et værktøj blev sendt til rumstationen som en del af RRM "Fase 2." Tavlerne demonstrerede yderligere aktiviteter, der er afgørende for servicering af fritflyvende satellitter. Tilsvarende det nye værktøj, den visuelle inspektion Poseable Invertebrate Robot, eller VIPIR, udstillet state-of-the-art nær- og mellemtoneinspektion ved hjælp af en artikulerbar, "slangelignende" boreskopværktøj.
Gennem disse to faser og flere dages operationer, RRM-teamet har bundet og konsekvent præsteret under pres. Sammen skabte de en nyttelast og fuldførte en mission, der var afgørende for fremtiden for satellitservice. I øjeblikket, de udvikler og arbejder på at udføre en tredje fase af RRM, som vil fortsætte med at fremme den nødvendige teknologi til robottankning. RRM 3 vil fokusere specifikt på at servicere kryogene væske- og xenongasgrænseflader, som vil understøtte fremtidige videnskabelige missioner, når mennesker udvider deres udforskning længere ind i vores solsystem.
"Rumstationen var en vidunderlig facilitet til at teste vores teknologier, og vi ved, at RRMs afgang vil give plads til endnu et stort eksperiment, " sagde Jill McGuire, RRM projektleder. "Vi er stolte af det, vi opnåede med RRM, og er begejstrede for at bidrage til de næste stadier af muliggørelse af robotsatellitservice."
 Varme artikler
Varme artikler
-
 Undersøgelse fanger seks galakser, der pludselig gennemgår, dramatiske overgangeEn ny undersøgelse ledet af University of Maryland astronomer dokumenterede seks søvnige, lavioniserende nukleare emissionslinje-galakser (LINERs; venstre), der pludselig omdannes til flammende kvasar
Undersøgelse fanger seks galakser, der pludselig gennemgår, dramatiske overgangeEn ny undersøgelse ledet af University of Maryland astronomer dokumenterede seks søvnige, lavioniserende nukleare emissionslinje-galakser (LINERs; venstre), der pludselig omdannes til flammende kvasar -
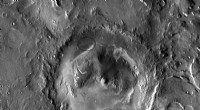 Et lovende sted for livet på MarsHovedmålet med Mars Curiosity -missionen var at afgøre, om området omkring Gale Crater tilbød et miljø, der var gunstigt for mikrober. Kredit:NASA Da NASAs Curiosity rover gør sin vej op på den ce
Et lovende sted for livet på MarsHovedmålet med Mars Curiosity -missionen var at afgøre, om området omkring Gale Crater tilbød et miljø, der var gunstigt for mikrober. Kredit:NASA Da NASAs Curiosity rover gør sin vej op på den ce -
 Ny NASA -satellit jagter efter fjerne planeterIllustration af NASAs Transiting Exoplanet Survey Satellite - TESS - observerer en M -dværgstjerne med baner i kredsløb. NASAs Goddard Space Flight Center Menneskecentrisk sprog er svært at undgå, nå
Ny NASA -satellit jagter efter fjerne planeterIllustration af NASAs Transiting Exoplanet Survey Satellite - TESS - observerer en M -dværgstjerne med baner i kredsløb. NASAs Goddard Space Flight Center Menneskecentrisk sprog er svært at undgå, nå -
 Rusland vil erstatte 2 kosmonauter sat til opsendelse til rummetKredit:CC0 Public Domain Ruslands rumagentur sagde onsdag, at to kosmonauter, der er planlagt til at opsende til den internationale rumstation, vil blive erstattet med suppleanter af medicinske år
Rusland vil erstatte 2 kosmonauter sat til opsendelse til rummetKredit:CC0 Public Domain Ruslands rumagentur sagde onsdag, at to kosmonauter, der er planlagt til at opsende til den internationale rumstation, vil blive erstattet med suppleanter af medicinske år
- Indsnævring af Mælkevejens masse
- Nye nanopartikler venter på at frigive medicin, målinfektion
- Suomi NPP Satellite stirrer Helene i øjnene
- En banebrydende astrofysikkode modellerer hurtigt stjernekollisioner
- Maskinlæring og neurale netværk genkender eksotiske isolerende faser i kvantematerialer
- NASAs asteroidejæger Lucy svæver ind i himlen med diamanter