


Software finder den bedste måde at holde en Mars-landing på
Et selvportræt af NASAs Curiosity Mars rover. Kredit:NASA/JPL-Caltech/MSSS
At vælge et landingssted for en rover på vej til Mars er en langvarig proces, der normalt involverer store udvalg af videnskabsmænd og ingeniører. Disse udvalg bruger typisk flere år på at afveje en missions videnskabelige mål op imod et køretøjs tekniske begrænsninger, at identificere steder, der både er videnskabeligt interessante og sikre at lande på.
For eksempel, en missions videnskabshold vil måske udforske visse geologiske steder for tegn på vand, liv, og beboelighed. Men ingeniører kan finde ud af, at disse steder er for stejle til, at et køretøj kan lande sikkert, eller stederne modtager muligvis ikke nok sollys til at drive køretøjets solpaneler, når det først er landet. At finde et passende landingssted indebærer derfor at sammensætte information indsamlet gennem årene af tidligere Mars-missioner. Disse data, selvom de vokser med hver mission, er ujævne og ufuldstændige.
Nu har forskere ved MIT udviklet et softwareværktøj til computerstøttet opdagelse, der kan hjælpe missionsplanlæggere med at træffe disse beslutninger. Det producerer automatisk kort over gunstige landingssteder, ved hjælp af de tilgængelige data om Mars' geologi og terræn, samt en liste over videnskabelige prioriteter og tekniske begrænsninger, som en bruger kan specificere.
Som et eksempel, en bruger kan betinge sig, at en rover skal lande på et sted, hvor den kan udforske visse geologiske mål, såsom søer med åbent bassin. På samme tid, landingsstedet bør ikke overstige en vis hældning, ellers ville køretøjet vælte, mens det forsøgte at lande. Programmet genererer derefter et "favorability map" over landingssteder, der opfylder begge begrænsninger. Disse placeringer kan skifte og ændre sig, efterhånden som en bruger tilføjer yderligere specifikationer.
Programmet kan også udlægge mulige stier, som en rover kan tage fra en given landingsplads til bestemte geologiske træk. For eksempel, hvis en bruger angiver, at en rover skal udforske sedimentære steneksponeringer, programmet producerer stier til sådanne nærliggende strukturer og beregner den tid, det ville tage at nå dem.
Victor Pankratius, hovedforsker ved MIT's Kavli Institute for Astrophysics and Space Research, siger, at missionsplanlæggere kan bruge programmet til hurtigt og effektivt at overveje forskellige landings- og udforskningsscenarier.
"Dette kommer aldrig til at erstatte det egentlige udvalg, men det kan gøre tingene meget mere effektive, fordi du kan lege med forskellige scenarier, mens du taler, " siger Pankratius.
Holdets undersøgelse blev offentliggjort online den 31. august af Jord- og rumvidenskab og er en del af tidsskriftets onlineudgave den 8. september.
Nye sider
Pankratius og postdoc Guillaume Rongier, i MIT's Department of Earth, Atmosfæriske og planetariske videnskaber, skabte programmet til at identificere gunstige landingssteder for en konceptuel mission, der ligner NASAs Mars 2020 rover, som er konstrueret til at lande i vandret, også selvom, støvfrie områder og har til formål at udforske en gammel, potentielt beboelig, sted med magmatiske fremspring.
De fandt ud af, at programmet identificerede mange landingssteder for roveren, som er blevet overvejet tidligere, og det fremhævede andre lovende landingssteder, som sjældent blev foreslået. "Vi ser, at der er steder, vi kunne udforske med eksisterende rover-teknologier, at landingspladskomiteer måske ønsker at genoverveje, " siger Pankratius.
Programmet kan også bruges til at udforske tekniske krav til fremtidige generationer af Mars-rovere. "Forudsat at du kan lande på stejlere kurver, eller køre hurtigere, så kan vi udlede, hvilke nye regioner du kan udforske, " siger Pankratius.
En uklar landing
Softwaren er delvist afhængig af "fuzzy logic, "et matematisk logikskema, der grupperer ting ikke på en binær måde som boolsk logik, såsom ja/nej, sandt falsk, eller sikkert/utrygt, men i en mere flydende, sandsynlighedsbaseret mode.
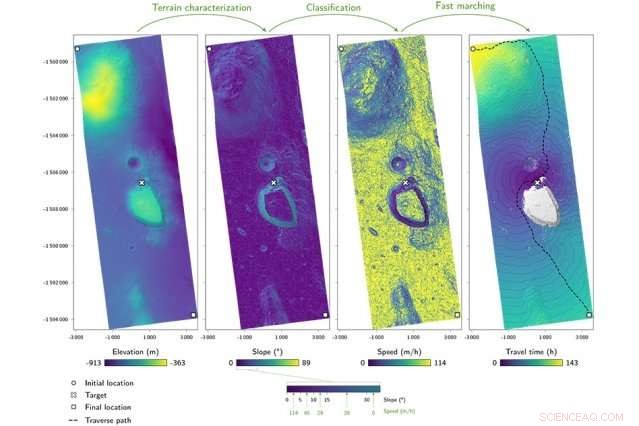
Figuren viser de på hinanden følgende trin for at efterligne en rover, der kører rundt på Mars. MIT-forskere udviklede en metode til først at karakterisere terrænet over interesseområdet. Baseret på den karakterisering og roverens funktioner, de bruger en "hurtigt marcherende" algoritme til at estimere roverhastigheden, som de bruger til at beregne den tid, det tager at køre overalt over det pågældende område. De kan også estimere den korteste vej fra en oprindelig placering, til et mål, til et endeligt sted. Kredit:NASA/JPL/University of Arizona, Guillaume Rongier
"Traditionelt kommer denne idé fra matematik, hvor i stedet for at sige et element hører til et sæt, Ja eller nej, fuzzy logik siger, at det hører med en vis sandsynlighed, "som således afspejler ufuldstændige eller upræcise oplysninger, Pankratius forklarer.
I forbindelse med at finde et passende landingssted, programmet beregner sandsynligheden for, at en rover kan forcere en bestemt skråning, med sandsynligheden faldende, efterhånden som en placering bliver mere stejl.
"Med fuzzy logik kan vi udtrykke denne sandsynlighed rumligt - hvor slemt er det, hvis jeg er så stejl, kontra denne stejle, " siger Pankratius. "Det er en måde at håndtere unøjagtighed på, på en måde."
Brug af algoritmer relateret til fuzzy logik, holdet skaber råt, eller initial, favorabilitetskort over mulige landingssteder over hele planeten. Disse kort er opdelt i individuelle celler, hver repræsenterer omkring 3 kvadratkilometer på overfladen af Mars. Programmet beregner, for hver celle, sandsynligheden for, at det er et gunstigt landingssted, og genererer et kort, der er farvegraderet til at repræsentere sandsynligheder mellem 0 og 1. Mørkere celler repræsenterer steder med en næsten nul sandsynlighed for at være et gunstigt landingssted, mens lettere steder har en større chance for en sikker landing med interessante videnskabelige udsigter.
Når de har genereret et råkort over mulige landingssteder, forskerne tager højde for forskellige usikkerheder i landingsstedet, såsom ændringer i bane og potentielle navigationsfejl under nedstigning. I betragtning af disse usikkerheder, programmet genererer derefter landingsellipser, eller cirkulære mål, hvor en rover sandsynligvis vil lande for at maksimere sikkerheden og den videnskabelige udforskning.
Programmet bruger også en algoritme kendt som hurtig marchering til at kortlægge stier, som en rover kan overtage et givet terræn, når den er landet. Hurtig marchering bruges typisk til at beregne udbredelsen af en front, såsom hvor hurtigt en vindfront når en kyst, hvis man rejser med en given hastighed. For første gang, Pankratius og Rongier anvendte hurtig march til at beregne en rovers rejsetid, når den rejser fra et udgangspunkt til en geologisk struktur af interesse.
"Hvis du er et sted på Mars, og du får dette bearbejdede kort, Du kan spørge, 'Herfra, hvor hurtigt kan jeg gå til ethvert punkt i mine omgivelser? Og denne algoritme vil fortælle dig, " siger Pankratius.
Algoritmen kan også kortlægge ruter for at undgå visse forhindringer, der kan bremse en rovers tur, og kortlægge sandsynligheder for at ramme bestemte typer geologiske strukturer i et landingsområde.
"Det er sværere for en rover at køre gennem støv, så det vil gå i et langsommere tempo, og støv er ikke nødvendigvis overalt, bare i pletter, " siger Rongier. "Algorithmen vil tage sådanne forhindringer i betragtning, når de kortlægger de hurtigste gennemkørende stier."
Holdene siger, at operatører af nuværende rovere på Mars-overfladen kan bruge softwareprogrammet til at dirigere køretøjerne mere effektivt til steder af videnskabelig interesse. I fremtiden, Pankratius forestiller sig, at denne teknik eller noget lignende skal integreres i stadig mere autonome rovere, der ikke kræver, at mennesker betjener køretøjerne hele tiden fra Jorden.
"En dag, hvis vi har fuldt autonome rovere, de kan tage højde for alle disse ting for at vide, hvor de kan gå hen, og være i stand til at tilpasse sig uforudsete situationer, " siger Pankratius. "Du vil have autonomi, ellers kan det tage lang tid at kommunikere frem og tilbage, når man hurtigt skal træffe kritiske beslutninger."
Holdet undersøger også anvendelser af teknikkerne til udforskning af geotermiske steder på Jorden i samarbejde med MIT Earth Resources Lab i Department of Earth, Atmosfæriske og planetariske videnskaber.
"Det er et meget lignende problem, " siger Pankratius. "I stedet for at sige 'Er dette et godt websted, Ja eller nej?' du kan sige, "Vis mig et kort over alle de områder, der sandsynligvis ville være levedygtige for geotermisk udforskning."
Efterhånden som data forbedres, både for Mars og for geotermiske strukturer på Jorden, han siger, at de data kan føres ind i det eksisterende program for at give mere præcise analyser.
"Programmet kan gradvist forbedres, " han siger.
Denne historie er genudgivet med tilladelse fra MIT News (web.mit.edu/newsoffice/), et populært websted, der dækker nyheder om MIT-forskning, innovation og undervisning.
 Varme artikler
Varme artikler
-
 Returnering af LIDARKredit:ESA/IPEV/PNRA–S. Thoolen På en halvø langt væk, langt væk, en laser skyder ind i himlen for at studere den antarktiske atmosfære på Concordia forskningsstation. Lysdetektion og rækkevidde,
Returnering af LIDARKredit:ESA/IPEV/PNRA–S. Thoolen På en halvø langt væk, langt væk, en laser skyder ind i himlen for at studere den antarktiske atmosfære på Concordia forskningsstation. Lysdetektion og rækkevidde, -
 Gamle data, nye tricks:Friske resultater fra NASAs Galileo-rumfartøj 20 år senereDenne infografik beskriver Ganymedes magnetosfære. Kredit:NASAs Goddard Space Flight Center/Mary Pat Hrybyk-Keith Langt på tværs af solsystemet, hvorfra Jorden kun fremstår som en lyseblå prik, NA
Gamle data, nye tricks:Friske resultater fra NASAs Galileo-rumfartøj 20 år senereDenne infografik beskriver Ganymedes magnetosfære. Kredit:NASAs Goddard Space Flight Center/Mary Pat Hrybyk-Keith Langt på tværs af solsystemet, hvorfra Jorden kun fremstår som en lyseblå prik, NA -
 Hvor massiv er Supermassive? Astronomer måler flere sorte huller, Længere vækEn kunstners gengivelse af de indre områder af en aktiv galakse/kvasar, med et supermassivt sort hul i midten omgivet af en skive varmt materiale, der falder i. Indsatsen nederst til højre viser, hvor
Hvor massiv er Supermassive? Astronomer måler flere sorte huller, Længere vækEn kunstners gengivelse af de indre områder af en aktiv galakse/kvasar, med et supermassivt sort hul i midten omgivet af en skive varmt materiale, der falder i. Indsatsen nederst til højre viser, hvor -
 Stor rumsten skal strege forbi Jorden på onsdagStor asteroide til at slynge forbi Jorden En asteroide, der strækker sig 650 meter (2, 000 fod) på tværs er på vej til at suse forbi Jorden på onsdag i en sikker - men ubehageligt tæt - afstand, i
Stor rumsten skal strege forbi Jorden på onsdagStor asteroide til at slynge forbi Jorden En asteroide, der strækker sig 650 meter (2, 000 fod) på tværs er på vej til at suse forbi Jorden på onsdag i en sikker - men ubehageligt tæt - afstand, i
- Fremtiden for kulminedrift deler polakkerne forud for klimaforhandlingerne
- EU trækker Polen til højesteret over gammel skovhugst
- Rumvejrshændelser knyttet til menneskelig aktivitet
- Domstolssoftware er muligvis ikke mere præcis end webundersøgelsesdeltagere til at forudsige krimi…
- Rumskrot:Houston, vi har et problem
- Byggesten til kvantecomputere mere almindelig end tidligere antaget