


Gående robotter kan hjælpe med forskning på andre planeter

En "benet" robot, der navigerer i et planetarisk-analogt landskab i White Sands Dune Field i New Mexico. Kredit:Ryan Ewing
I dag bruger NASA rovere på hjul til at navigere på Mars' overflade og udføre planetarisk videnskab, men forskning, der involverer videnskabsmænd fra Texas A&M University, vil teste gennemførligheden af ny overfladeudforskningsteknologi:walking robotter.
Ryan Ewing, Robert R. Berg professor ved Institut for Geologi og Geofysik ved Texas A&M, og Marion Nachon, associeret forsker i geologi og geofysik, er medforskere på projektet støttet af NASA og ledet af Feifei Qian, en WiSE Gabilan Adjunkt ved University of Southern California Viterbi School of Engineering. Målet med forskningen er at skabe og teste gående, eller "benede", robotter, der lettere kunne glide gennem iskolde overflader, skorpesand og andre vanskelige at navigere miljøer, og dermed forbedre videnskabsmænds evner til at indsamle information fra planetariske kroppe markant. .
Mens Mars Exploration Rovers og andre robotter med succes er blevet sendt ud i rummet, opererer de typisk baseret på forudprogrammerede dagsordener, der kræver, at menneskelige videnskabsmænd og ingeniører indtaster detaljerede instruktioner om, hvor de skal hen, og hvad de skal gøre, før robotternes ankomst til planet. Som et resultat, når robotten støder på uventede scenarier eller opdager interessante målinger, har den begrænsede muligheder for at tilpasse sin plan. Dette kan forhindre, hvordan robotter og rovere navigerer i nye miljøer eller endda få dem til at gå glip af videnskabelige muligheder.
Ewing siger, at øget forståelse af, hvordan man integrerer robotteknologi med både planetarisk videnskab og kognitiv videnskab, vil forbedre robotstøttet udforskning af planetariske miljøer. Dette projekt har til formål at teste næste generations højmobilitetsrobotter, der adræt kan bevæge sig gennem planetariske overflader og fleksibelt understøtte videnskabelige udforskningsmål.
"Vi vil udføre denne forskning i to vigtige planetariske analoge steder, der præsenterer veldefinerede gradienter i jordtyper fra skorpet sand ved White Sands Dune Field, N. M., til iskolde stenblandinger ved Mt. Hood, Ore.," forklarede Ewing. "Vores mål er at integrere robotter med ben med høj mobilitet med indlejrede terrænfølende teknologier og kognitive menneskelige beslutningsmodeller for at studere de geotekniske egenskaber af disse jorder."
Projektet anvender "bioinspirerede" robotter med ben, hvilket betyder, at deres form er modelleret efter dyrs unikke evner til at bevæge sig godt på udfordrende overflader som blødt sand. Ved at bruge den nyeste "direct-drive" aktuatorteknologi kan disse robotter "føle" terrænet (f.eks. sandblødhed og klippeformer) gennem deres ben. Denne evne tillader robotter med ben at interagere med miljøet på samme måde som dyr og justerer deres bevægelser efter behov.
Som Qian udtrykker det, er disse robotter modelleret på en måde, der tillader dem "ikke bare at efterligne, hvordan dyrene ser ud, men virkelig at forstå, hvad der gør disse dyr succesrige på forskellige terræner."
Evnen til at "føle" terrænet ved hjælp af ben gør det også muligt for disse robotter nemt at indsamle information om miljøet, mens de bevæger sig rundt og justere udforskningsstrategier baseret på disse oplysninger.
"Vi vil arbejde på at bestemme, hvordan friktionen og eroderbarheden af forskellige jordarter påvirkes af overfladeskorper, klippedækket jord og isindhold," forklarede Ewing. "Vi vil implementere de direkte drevne robotter med ben til at kortlægge jordstyrken på to steder, der er som landskaber på Månen, Mars og andre verdener. Vi vil samtidig måle miljøparametre, der styrer jordstyrken, herunder partikelstørrelse og form, jordfugtighed, kemisk sammensætning og isindhold."
Mens videnskabsmænd fortsat stræber efter at udforske planetariske miljøer, bemærker Qian, at fordelene ved at sende robotter og rovere på indledende missioner for at indsamle information, før de sender mennesker, er betydelige.
"Selv for miljøer, hvor det er sikkert at sende astronauter, kan mobile robotter integrere videnskabelig instrumentering og hjælpe med at tage præcise målinger, mens de bevæger sig rundt," sagde Qian.
Forskergruppen omfatter også forskere fra University of Pennsylvania, Georgia Institute of Technology og NASA's Johnson Space Center.
"Dette er drømmeholdet og en meget sjælden chance for at bringe et hold med alle komponenterne i ét projekt," sagde Qian. + Udforsk yderligere
Insekt-inspireret kunstig intelligens til autonome robotter
Sidste artikelSmukke klitter på Mars, skulptureret af hvirvlende vinde
Næste artikelSøger efter maser-emissioner i Skyttens stjernerstrøm
 Varme artikler
Varme artikler
-
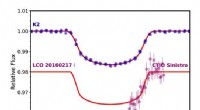 Astronomer opdager to varme Jupiter -eksoplaneter, der kredser om fjerne stjernerLyskurve for transit i EPIC 211418729b. Kredit:Shporer et al., 2017. Astronomer har fundet to nye såkaldte varme Jupiter exoplaneter, der kredser om stjerner, der ligger mere end 1, 300 lysår væk
Astronomer opdager to varme Jupiter -eksoplaneter, der kredser om fjerne stjernerLyskurve for transit i EPIC 211418729b. Kredit:Shporer et al., 2017. Astronomer har fundet to nye såkaldte varme Jupiter exoplaneter, der kredser om stjerner, der ligger mere end 1, 300 lysår væk -
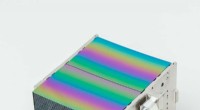 Billede:X-ray øje af AthenaKredit:ESA/cosine Research Dette spejlmodul - dannet af 140 industrielle silicium spejlplader, stablet sammen af et sofistikeret robotsystem – er bestemt til at udgøre en del af det optiske syst
Billede:X-ray øje af AthenaKredit:ESA/cosine Research Dette spejlmodul - dannet af 140 industrielle silicium spejlplader, stablet sammen af et sofistikeret robotsystem – er bestemt til at udgøre en del af det optiske syst -
 Ældste galakse protocluster danner queens courtDen blå skygge viser den beregnede udstrækning af protoclusteret, og den blåere farve indikerer højere tæthed af galakser i protoclusteret. De røde objekter i zoom-in figurer er de 12 galakser, der fi
Ældste galakse protocluster danner queens courtDen blå skygge viser den beregnede udstrækning af protoclusteret, og den blåere farve indikerer højere tæthed af galakser i protoclusteret. De røde objekter i zoom-in figurer er de 12 galakser, der fi -
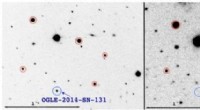 Ny langsomt udviklende Type Ibn supernova opdagetTil venstre:OGLE-2014-SN-131 (blå cirkel) i et VLT-optagelsesbillede taget med et R−specialfilter den 29. november, 2014 (JD 2456990.08). Til højre:NTT-billede fra 1.2. august, 2016 (JD 2457601.74), v
Ny langsomt udviklende Type Ibn supernova opdagetTil venstre:OGLE-2014-SN-131 (blå cirkel) i et VLT-optagelsesbillede taget med et R−specialfilter den 29. november, 2014 (JD 2456990.08). Til højre:NTT-billede fra 1.2. august, 2016 (JD 2457601.74), v
- Rumvejrmodel simulerer solstorme fra ingenting
- Forskere opnår den første acceleration af elektroner nogensinde i plasmabølger
- Boeing, andre vurderer virkningen af toldsatserne mellem USA og Kina
- Avanceret matematik fortætter COVID-19-kompleksiteten
- Tur for at kontrollere stråling efter 1989 sænkning af russisk sub
- Grundvand driver hurtig erosion af Canterbury-kysten, New Zealand