


En robottragt til at udforske månens farlige terræn
Intuitive Machines havde for nylig et stort gennembrud og blev med succes den første ikke-statslige enhed, der landede på månen i februar. Landingen var i det mindste delvist vellykket - virksomhedens Odysseus-lander endte på sin side, selvom dens instrumenter og kommunikationsforbindelser forblev i det mindste delvist funktionelle. Den mission, kaldet IM-1, var den første i en række ambitiøse missioner, som virksomheden har planlagt. Og de udgav for nylig et papir på LPSC 2024-konferencen, der beskriver funktionerne i en unik hopperobot, der vil tage en tur på sin næste månemission.
Kendt som South Pole Hopper (eller S.P. Hopper), vil robotten være den første i en ny klasse kaldet µNova. Med en vægt på kun 35 kg og kun 70 cm høj, er dette miniaturiserede fartøj et selvstændigt rumfartøj, der kan operere helt autonomt. Den skal gøre dette for at fuldføre sin mission med at udforske regionen omkring de permanent skyggede regioner (PSR'er) ved månens sydpol.
Konkret har håndværket fire forskellige mål:
- Bestem de geologiske egenskaber af en specifik højderyg ved sydpolen, inklusive inde i en PSR
- Beregn overfladens lysstyrketemperaturer for begge områder badet i det mindste delvist i solens stråler og også i PSR.
- Undersøg "overfladeruheden" og "termisk inerti" af månens regolit ved dens landingssted.
- Afgør, hvor meget brint der er i det generelle område – med den forståelse, at det højst sandsynligt vil blive bundet op i vand.
Ingen af disse mål kræver individuelt S.P. Hoppers mest bemærkelsesværdige egenskab - men det ville helt sikkert være nyttigt at fuldføre dem - den kan "hoppe" ved at skubbe sig ud af månens overflade og lande i et område, den vælger helt autonomt - selv i en PSR. Det kan gøre det i en vinkel på op til 10 grader, er virksomheden hurtig til at påpege på grund af dets seneste vanskeligheder med rumfartøjets vinkel.
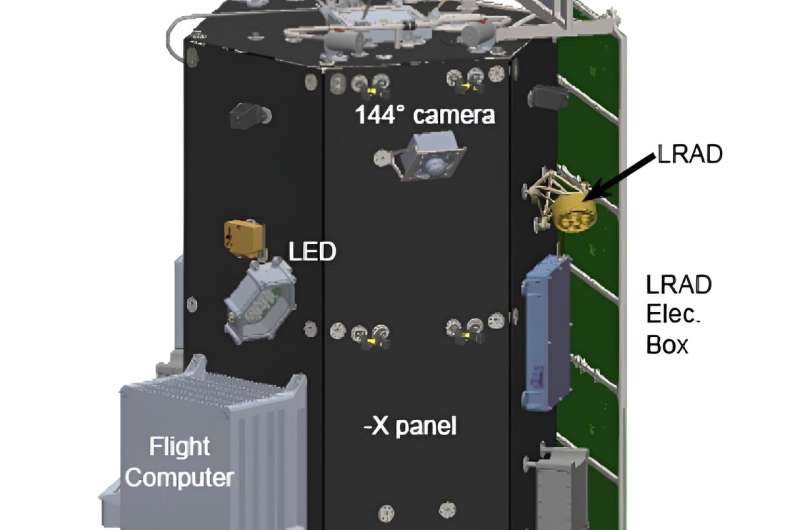
Papiret beskriver flere tekniske egenskaber ved tragten - herunder det faktum, at den vil bruge et trådløst LTE-system til at kommunikere. For at indsamle de data, der kræves til sin mission, har den tre videnskabelige hovedinstrumenter:et sæt CMOS-kameraer, hvis primære opgave er at hjælpe med autonom navigation, men som også kan sende billeder tilbage til Jorden for at blive analyseret; LRAD termopile-sensorsystemet; designet til at fange lysstyrkemålinger af regolitten og PLWS, et miniature neutronspektrometer, specielt designet til at lede efter brint i rummet.
Men den måske mest interessante del af avisen beskriver sin flyveplan. S. P. Hopper er designet til at lave 5 – muligvis 6 – hop, når den lander på månens sydpol. Den første vil være en "idriftsættelseshop", der kun vil krydse 20 m eller deromkring. Det næste vil være et 100 m "proof of concept"-hop, der vil demonstrere, at en hoppende robot er en levedygtig transportform på månen.
Efter disse første flyvninger vil S. P. Hopper flyve omkring 300 m til kanten af Marston-krateret, en del af Shackleton-de Gerlache-ryggen. Den vil så flyve ind i selve krateret, som er en PSR, og derefter flyve tilbage ud til højderyggen igen. Hvis der er nok brændstof tilbage, planlægger Intuitive Machines en sjette udforskningsflyvning for at se noget interessant i nærheden.
I øjeblikket er IM-2, flyvningen, der vil tage S.P. Hopper til Sydpolen, planlagt til opsendelse engang i år. I betragtning af Intuitive Machines relative succes med Odysseus-landeren, er der også en masse optimisme omkring succesen med denne mission. Indtil videre må vi dog vente og se, om virksomheden kan gennemføre en endnu mere succesfuld opfølgningsmission.
Flere oplysninger: Paper:www.hou.usra.edu/meetings/lpsc2024/pdf/1162.pdf
Leveret af Universe Today
 Varme artikler
Varme artikler
-
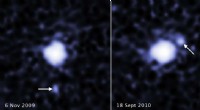 Hubble ser månen omkring den tredjestørste dværgplanetDisse to billeder, med et års mellemrum, afsløre en måne, der kredser om dværgplaneten 2007 OR10. Hvert billede, taget af Hubble-rumteleskopets Wide Field Camera 3, viser ledsageren i en anden orbital
Hubble ser månen omkring den tredjestørste dværgplanetDisse to billeder, med et års mellemrum, afsløre en måne, der kredser om dværgplaneten 2007 OR10. Hvert billede, taget af Hubble-rumteleskopets Wide Field Camera 3, viser ledsageren i en anden orbital -
 Fra skyer til kratere:Mars ExpressDette billede fra ESAs Mars Express viser et smukt udsnit af den røde planet fra den nordlige polarkappe og nedad, og højdepunkter krateret, pockmarkede områder af Terra Sabaea og Arabia Terra-regione
Fra skyer til kratere:Mars ExpressDette billede fra ESAs Mars Express viser et smukt udsnit af den røde planet fra den nordlige polarkappe og nedad, og højdepunkter krateret, pockmarkede områder af Terra Sabaea og Arabia Terra-regione -
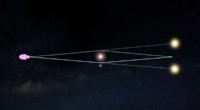 Fordrejet rum-tid for at hjælpe WFIRST med at finde exoplaneterDenne illustration viser begrebet gravitationel mikrolinsing. Når en stjerne på himlen passerer næsten foran en anden, det kan linse lys fra baggrundskildestjernen. Hvis den nærmeste stjerne er vært f
Fordrejet rum-tid for at hjælpe WFIRST med at finde exoplaneterDenne illustration viser begrebet gravitationel mikrolinsing. Når en stjerne på himlen passerer næsten foran en anden, det kan linse lys fra baggrundskildestjernen. Hvis den nærmeste stjerne er vært f -
 Ultra-høj-energi gammastråler stammer fra pulsar-tågerEfter at have opdaget ni ultra-højenergi gammastrålekilder i 2020, forskere ved High Altitude Water Cherenkov Observatory (HAWC) udnyttede anlæggets brede synsfelt og undersøgelsesmuligheder til at fa
Ultra-høj-energi gammastråler stammer fra pulsar-tågerEfter at have opdaget ni ultra-højenergi gammastrålekilder i 2020, forskere ved High Altitude Water Cherenkov Observatory (HAWC) udnyttede anlæggets brede synsfelt og undersøgelsesmuligheder til at fa
- Metalforurening i britisk farvand kan true kammuslinger, undersøgelse afslører
- Hvorfor vil videnskabelige beviser ikke ændre sindet hos Loch Ness-monstres sande troende?
- Framework giver nye værktøjer til systematisk at opbygge samarbejde; videnskabsmænd udvider teori…
- 10 skøre former for alternativ energi
- New Zealand stopper ny offshore olie- og gasefterforskning
- Ultrashort lysimpulser til hurtige lysbølgecomputere