


Ny realistisk computermodel vil hjælpe robotter med at samle månestøv
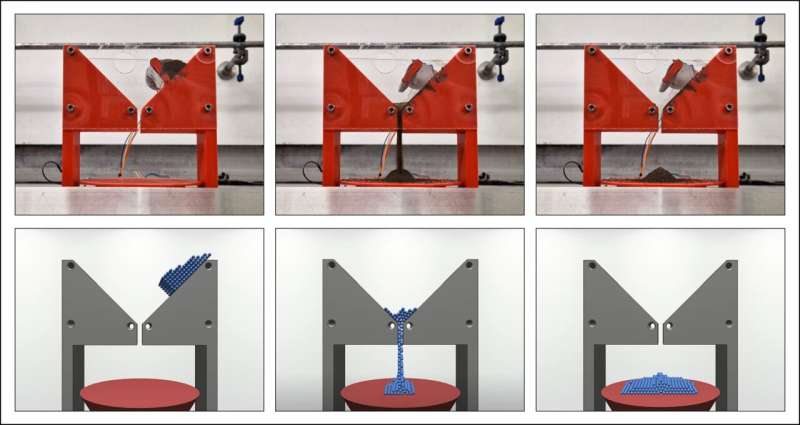
En ny computermodel efterligner månestøv så godt, at det kan føre til jævnere og sikrere månerobot-teleoperationer. Værktøjet, udviklet af forskere ved University of Bristol og baseret på Bristol Robotics Laboratory, kunne bruges til at træne astronauter forud for månemissioner.
Deres forskning er publiceret i tidsskriftet Frontiers in Space Technologies .
I samarbejde med deres industripartner, Thales Alenia Space i Storbritannien, som har specifik interesse i at skabe fungerende robotsystemer til rumapplikationer, undersøgte holdet en virtuel version af regolith, et andet navn for månestøv.
Lunar regolith er af særlig interesse for de kommende måneudforskningsmissioner, der er planlagt i løbet af det næste årti. Fra det kan videnskabsmænd potentielt udvinde værdifulde ressourcer såsom ilt, raketbrændstof eller byggematerialer for at understøtte en langsigtet tilstedeværelse på månen.
For at indsamle regolith fremstår fjernbetjente robotter som et praktisk valg på grund af deres lavere risici og omkostninger sammenlignet med menneskelig rumflyvning. Men at betjene robotter over disse store afstande introducerer store forsinkelser i systemet, hvilket gør dem sværere at kontrollere.
Nu hvor holdet ved, at denne simulering opfører sig på samme måde som virkeligheden, kan de bruge den til at spejle en robot på månen. Denne tilgang gør det muligt for operatører at styre robotten uden forsinkelser, hvilket giver en jævnere og mere effektiv oplevelse.
Hovedforfatter Joe Louca, baseret på Bristol's School of Engineering Mathematics and Technology forklarede:"Tænk på det som et realistisk videospil, der foregår på månen - vi vil sikre os, at den virtuelle version af månestøv opfører sig ligesom den faktiske ting, så at hvis vi bruger den til at styre en robot på månen, så vil den opføre sig, som vi forventer. Denne model er nøjagtig, skalerbar og let, så den kan bruges til at understøtte kommende måneudforskningsmissioner."
Denne undersøgelse fulgte af teamets tidligere arbejde, som fandt ud af, at ekspertrobotoperatører ønsker at træne på deres systemer med gradvist stigende risiko og realisme. Det betyder, at man starter i en simulering og bygger op til at bruge fysiske mock-ups, før man går videre til at bruge det faktiske system. En nøjagtig simuleringsmodel er afgørende for at træne og udvikle operatørens tillid til systemet.
Mens nogle særligt nøjagtige modeller af månestøv tidligere var blevet udviklet, er disse så detaljerede, at de kræver meget beregningstid, hvilket gør dem for langsomme til at styre en robot jævnt. Forskere fra DLR (German Aerospace Centre) tacklede denne udfordring ved at udvikle en virtuel model af regolith, der tager højde for dens tæthed, klæbrighed og friktion samt månens reducerede tyngdekraft. Deres model er af interesse for rumindustrien, da den er let på beregningsressourcer og derfor kan køres i realtid. Det fungerer dog bedst med små mængder månestøv.
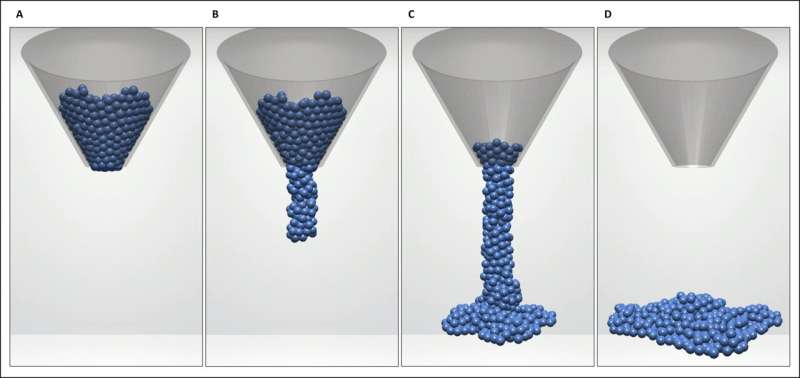
Bristol-teamets mål var først at udvide modellen, så den kan håndtere mere regolith, mens den forbliver let nok til at køre i realtid, og derefter at verificere den eksperimentelt.
Louca tilføjede:"Vores primære fokus i hele dette projekt var på at forbedre brugeroplevelsen for operatører af disse systemer - hvordan kunne vi gøre deres arbejde lettere? Vi begyndte med den originale virtuelle regolith-model udviklet af DLR og modificerede den for at gøre den mere skalerbar Derefter udførte vi en række eksperimenter - halvt i et simuleret miljø, halvt i den virkelige verden - for at måle, om det virtuelle månestøv opførte sig på samme måde som dets modstykke i den virkelige verden."
Da denne model af regolith er lovende for at være nøjagtig, skalerbar og let nok til at blive brugt i realtid, vil teamet næste gang undersøge, om den kan bruges, når robotter betjenes til at indsamle regolith.
De planlægger også at undersøge, om et lignende system kunne udvikles til at simulere Mars-jord, hvilket kunne være til gavn for fremtidige udforskningsmissioner, eller at træne videnskabsmænd til at håndtere materiale fra den længe ventede Mars Sample Return-mission.
Flere oplysninger: Joe Louca et al., Verifikation af en virtuel måneregolitsimulant, Grænser i rumteknologi (2024). DOI:10.3389/frspt.2024.1303964
Leveret af University of Bristol
 Varme artikler
Varme artikler
-
 At observere det usynlige:Den lange rejse til det første billede af et sort hulDet første direkte visuelle bevis på det supermassive sorte hul i centrum af galaksen Messier 87 og dens skygge. Kredit:EHT Collaboration Det første billede af et supermassivt sort hul i midten af
At observere det usynlige:Den lange rejse til det første billede af et sort hulDet første direkte visuelle bevis på det supermassive sorte hul i centrum af galaksen Messier 87 og dens skygge. Kredit:EHT Collaboration Det første billede af et supermassivt sort hul i midten af -
 Se Mars skyer svæve, takket være NASAs nysgerrighedSkyer driver hen over himlen over en Mars-horisont i denne accelererede sekvens af forbedrede billeder taget den 17. juli, 2017, af Navcam på NASAs Curiosity Mars rover. Billedkredit:NASA/JPL-Caltech/
Se Mars skyer svæve, takket være NASAs nysgerrighedSkyer driver hen over himlen over en Mars-horisont i denne accelererede sekvens af forbedrede billeder taget den 17. juli, 2017, af Navcam på NASAs Curiosity Mars rover. Billedkredit:NASA/JPL-Caltech/ -
 SpaceX:flere risici, bedre raketter?Kredit:Pixabay/CC0 Public Domain En prototype af SpaceXs ubemandede raket Starship eksploderede onsdag, tredje gang en testflyvning endte i flammer. Uheldene kan virke som katastrofer, men eksper
SpaceX:flere risici, bedre raketter?Kredit:Pixabay/CC0 Public Domain En prototype af SpaceXs ubemandede raket Starship eksploderede onsdag, tredje gang en testflyvning endte i flammer. Uheldene kan virke som katastrofer, men eksper -
 Hubble ser skiftende årstider på SaturnKredit:NASAs Goddard Space Flight Center NASAs Hubble-rumteleskop giver astronomer et overblik over ændringer i Saturns enorme og turbulente atmosfære, når planetens nordlige halvkugle sommeroverg
Hubble ser skiftende årstider på SaturnKredit:NASAs Goddard Space Flight Center NASAs Hubble-rumteleskop giver astronomer et overblik over ændringer i Saturns enorme og turbulente atmosfære, når planetens nordlige halvkugle sommeroverg
- Astronomer undersøger emissionen fra en nærliggende pulsarvindtåge
- Hvad hvis Yellowstone -supervulkanen brød ud?
- Lockdown-indlæringskurven
- Forskere opfinder ny RNA-nanoteknologi til at dekorere exosomer til effektiv kræftbehandling
- Lymfatisk Systemvidenskab Aktiviteter
- Rene carbon nanorør med suveræne egenskaber