


Kødædende planter inspirerer smarte glatte overflader og bioniske robotter
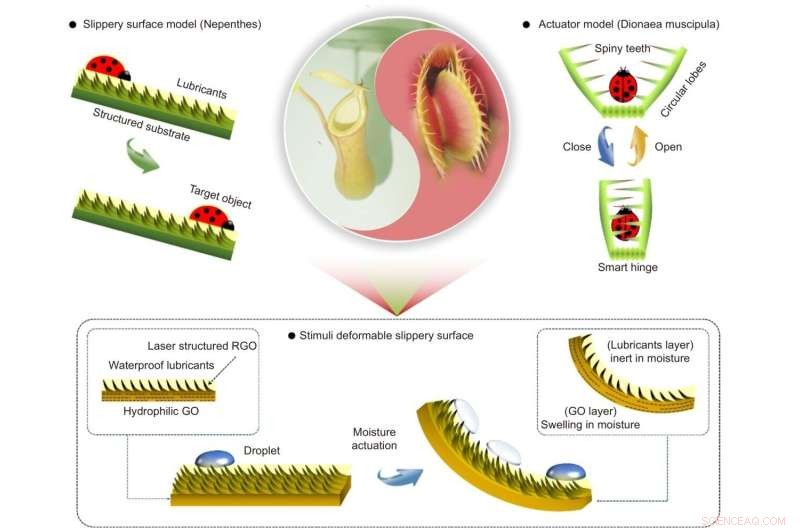
Grundlæggende koncept med hybrid bionisk fugtreagerende form-morphing glat overflade inspireret af multi-form kødædende planter. Nepenthes kandeplante fanger insekter passivt ved hjælp af en glidende overflade, der er infunderet med smøremiddel. Dionaea muscipula jager aktivt gennem en stimuli-responsiv aktiveringsmekanisme. Vi kombinerede de glatte overflader (passivt bytte) og stimuli-responsiv aktivering (aktivt bytte), så vi foreslog en hybrid bionisk fugtdeformerbar glat overflade-baseret GO, som muliggør både aktiv og passiv dråbemanipulation. GO:grafenoxid; RGO, reduceret GO. Kredit:Compuscript Ltd
En ny publikation fra Opto-Electronic Advances diskuterer, hvordan kødædende planter inspirerer til smarte glatte overflader og bioniske robotter.
Kødædende planter har inspireret innovationer af avancerede stimuli-responsive aktuatorer og smøremiddel-infunderede glatte overflader. Det er dog stadig en udfordring at udvikle hybride bioniske enheder, der kombinerer kødædende planters aktive og passive byttefangstevne. Forskerholdet udviklede en fugt-reagerende form-morphing glat overflade. De integrerede en glidende overflade med smøremiddel med en LRGO/GO tolags aktuator. Holdet forberedte en række proof-of-concept-aktuatorer, inklusive en smart frø-tunge og en smart blomst, der demonstrerer aktiv/passiv fangst, dråbemanipulation og sensing.
Kødædende planter kan fange og fordøje små insekter gennem sofistikerede aktiveringsmekanismer eller unik overfladebefugtning. Denne evne har inspireret udviklingen af kunstige smarte overflader/enheder til tekniske applikationer, såsom anti-isningsoverflader, anti-biofouling, dråbekondensering og dråbemanipulation. Efterligning af deres fældeadfærd har ført til innovative strategier til design af syntetiske overflader, aktuatorer og robotter.
Generelt adskiller fangstmekanismen for kødædende planter sig mellem forskellige arter, som kan klassificeres i to kategorier:aktiv fangst og passiv fangst. Imidlertid er hybride bioniske enheder, der kombinerer fordelene ved de to forskellige slags kødædende planter, med både positive og passive fangstevner, stadig sjældne. Kombinationen af Dionaea muscipula-inspirerede aktuatorer med en glat overflade, der efterligner Nepenthes-kandeplanten, er gavnlig for både aktuatordesign og udviklingen af en smart overflade med super fugtighed. Ikke desto mindre er det udfordrende at nå dette mål.
Femtosecond laser direct writing (FsLDW) induced photoreduction and simultaneous structuring to prepare a GO and LRGO bilayer actuator that enables dynamic deformation under moisture actuation. After that, a lubricant-infused slippery surface was integrated with the graphene actuator by immobilizing lubricant at the LRGO side through the capillary forces.
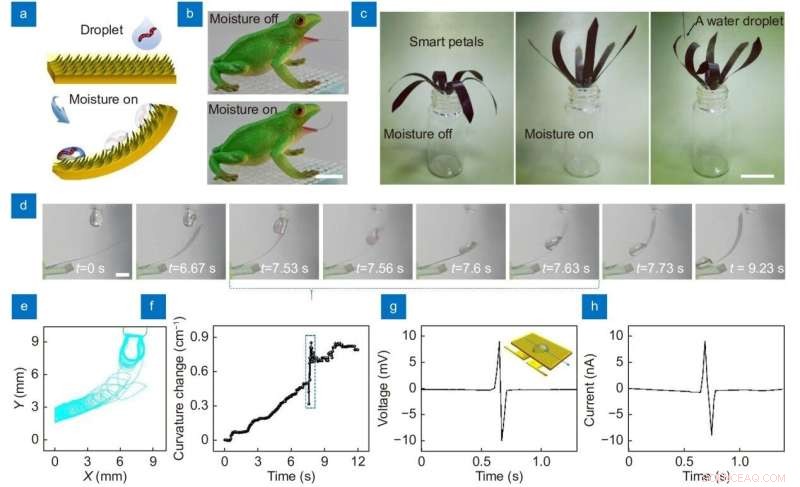
The manipulation of droplets on moisture responsive shape-morphing slippery surface. (a) Schematic illustration for the active and passive manipulation of a droplet containing live tubificidaes using the shape-morphing slippery surface. (b) The photographs of shape-morphing slippery frog tongue. The scale bar is 1.5 cm. (c) A smart water droplet harvesting flower. Every flower petal is made of the shape-morphing slippery surface (oil-LRGO/GO). The scale bar is 1.5 cm. (d) Moisture triggered active approach to water droplets containing live tubificidaes and the passive sliding behavior on the shape-morphing slippery surface. The scale bar is 0.5 cm. (e) The corresponding trajectory of the water droplet peripheries during the dynamic process. (f) The curvature changes of the shape-morphing slippery surface in (d). (g) The open-circuit voltage and (h) short-circuit current. Credit:Compuscript Ltd
The two types of carnivorous plants demonstrate distinct strategies for trapping prey. Nepenthes pitcher plants catch insects through a passive trapping mechanism with the help of lubricants-infused slippery surfaces. In contrast, Dionaea muscipula performs an active trapping behavior through a sophisticated actuating mechanism. The concept of the hybrid bionic model is the combination of the two tapping behaviors within one synthetic smart surface here, which the research team called a stimuli deformable slippery surface.
Traditional stimuli-responsive actuators enable reversible deformation under external stimuli. They reveal the great potential for developing trapping robots. However, in most cases, simple bending deformation cannot trap insects because of the slow response to environmental stimuli or the lack of surface wettability control. The team combined the moisture-responsive actuator with a lubricant-infused slippery surface together. The combined effect of actuation and slippery property endows the oil-infused LRGO/GO film with enhanced trapping ability.
The research team demonstrated a moisture-responsive shape-morphing slippery surface that can contact droplets actively and let them slide away passively. Based on this hybrid bionic concept, a smart frog tongue that can catch and manipulate droplets containing live tubificidaes is prepared. Notably, the slippery surface can bend under moisture actuation, get in touch with the droplet, and let it slide to the bottom, demonstrating both active catching and passive trapping capabilities.
In conclusion, the in-situ integration of the lubricant-infused slippery surface with the bilayer actuator does not degrade the actuating performance. It also improves its deformation degrees under moisture actuation. The presence of an oil layer can entirely prevent the transmission of water molecules through the LRGO side, and selective water adsorption only occurs within the GO layer. As a result, the oil-LRGO/GO actuator demonstrated large deformation curvature, short response/recovery time, and improved stability. For practical applications, laser interference ablation that uses an interference effect for periodical patterning is more effective. The significance of this work lies in the fabrication of a shape-morphing slippery surface with hybrid bionic functionalities of both stimuli-responsive deformation and oil-lubricated slippery properties.
The combination of shape-morphing ability with the slippery surface benefits both actuating performance and the usefulness of a smart surface with super wettability. It leads to new applications, such as droplet collection, manipulation, and rainfall sensing. Moisture-responsive actuators can directly harness energy from naturally occurring or engineered evaporation from water. That can subsequently be converted to mechanical energy or electricity, such as weather-responsive architectural systems, smart textiles, and soft robots. The cross-species bio-inspired materials benefit both actuator design and the development of smart surfaces with super wettability. The moisture-responsive shape-morphing slippery surface reveals great potential for developing bionic robots. + Udforsk yderligere
Liquid-infused slippery surface performs better than superhydrophobic surface in long-term corrosion resistance
 Varme artikler
Varme artikler
-
 Har prokaryoter cellevægge?Prokaryoter repræsenterer en af de to store klassifikationer i livet. De andre er eukaryoter . Prokaryoter er adskilt af deres lavere niveau af kompleksitet. De er alle mikroskopiske, skønt
Har prokaryoter cellevægge?Prokaryoter repræsenterer en af de to store klassifikationer i livet. De andre er eukaryoter . Prokaryoter er adskilt af deres lavere niveau af kompleksitet. De er alle mikroskopiske, skønt -
 Videnskaben bag, hvorfor nogle mennesker elsker dyr, og andre kunne være ligegladeKredit:xkunclova/Shutterstock.com Den nylige popularitet af designer hunde, katte, mikro-grise og andre kæledyr kan synes at antyde, at kæledyrshold ikke er mere end en mode. Ja, det antages ofte,
Videnskaben bag, hvorfor nogle mennesker elsker dyr, og andre kunne være ligegladeKredit:xkunclova/Shutterstock.com Den nylige popularitet af designer hunde, katte, mikro-grise og andre kæledyr kan synes at antyde, at kæledyrshold ikke er mere end en mode. Ja, det antages ofte, -
 Ikke så kold and? Mennesket bliver ved med at lede efter uddøde fugleDette foto fra oktober 2017 leveret af Cornell University Museum of Vertebrates viser et eksemplar af en pink-headed and i Ithaca, N.Y. På grund af prøvens alder, hovedet har skiftet farve. I oktober
Ikke så kold and? Mennesket bliver ved med at lede efter uddøde fugleDette foto fra oktober 2017 leveret af Cornell University Museum of Vertebrates viser et eksemplar af en pink-headed and i Ithaca, N.Y. På grund af prøvens alder, hovedet har skiftet farve. I oktober -
 Undskyld,Ikke undskyld:Når undskyldning gør tingene værre En række undersøgelser viste, at tilføjelsen af ordet undskyld til en afvisning gjorde afvisningen mere ondt. William Andrew/Getty Images At
Undskyld,Ikke undskyld:Når undskyldning gør tingene værre En række undersøgelser viste, at tilføjelsen af ordet undskyld til en afvisning gjorde afvisningen mere ondt. William Andrew/Getty Images At