


Tokyo Techs seksbenede robotter kommer tættere på naturen
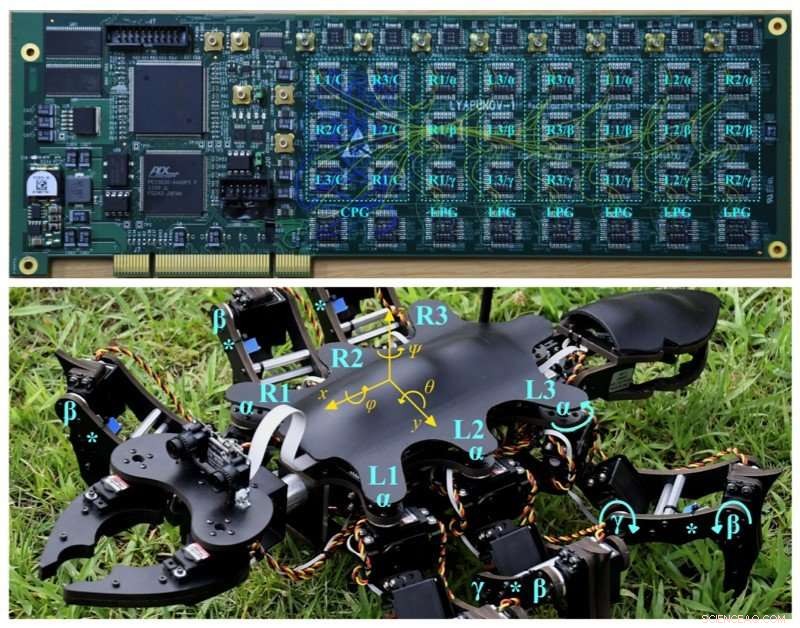
Udsigter af kredsløbskortet, der implementerer controlleren og af robotten. (Gengivet med tilladelse fra offentliggjort artikel). Kredit:IEEE ADGANG
En undersøgelse ledet af forskere ved Tokyo Institute of Technology (Tokyo Tech) har afsløret nye måder at køre flerbenede robotter ved hjælp af en to-niveau controller. Den foreslåede controller bruger et netværk af såkaldte ikke-lineære oscillatorer, der muliggør generering af forskellige gangarter og stillinger, som kun er specificeret af nogle få parametre på højt niveau. Studiet inspirerer til ny forskning i, hvordan flerbenede robotter kan styres, herunder i fremtiden ved hjælp af hjerne-computer-grænseflader.
I den naturlige verden, mange arter kan gå over skråninger og uregelmæssige overflader, nå steder, der er utilgængelige selv for de mest avancerede rover-robotter. Det forbliver et mysterium, hvordan komplekse bevægelser håndteres så problemfrit af selv de mindste væsner.
Hvad vi ved er, at selv de simpleste hjerner indeholder mønstergeneratorkredsløb (CPG'er), som er tilsluttet specielt til at generere gangmønstre. Forsøg på at kopiere sådanne kredsløb kunstigt har indtil videre haft begrænset succes, på grund af dårlig fleksibilitet.
Nu, forskere i Japan og Italien foreslår en ny tilgang til generering af gangmønster, baseret på et hierarkisk netværk af elektroniske oscillatorer arrangeret over to niveauer, hvilket de har demonstreret ved hjælp af en myrelignende hexapod-robot. Præstationen åbner nye veje til kontrol af robotter med ben. Udgivet i IEEE adgang , forskningen er resultatet af samarbejde mellem forskere fra Tokyo Tech, delvist finansieret af World Research Hub Initiative, det polske videnskabsakademi i Krakow, Polen, og universitetet i Catania, Italien.
Den biologisk inspirerede controller består af to niveauer. På toppen, den indeholder en CPG, ansvarlig for at kontrollere den overordnede rækkefølge af benbevægelser, kendt som gang. På bunden, den indeholder seks lokale mønstergeneratorer (LPG'er), ansvarlig for at kontrollere de enkelte bens baner.
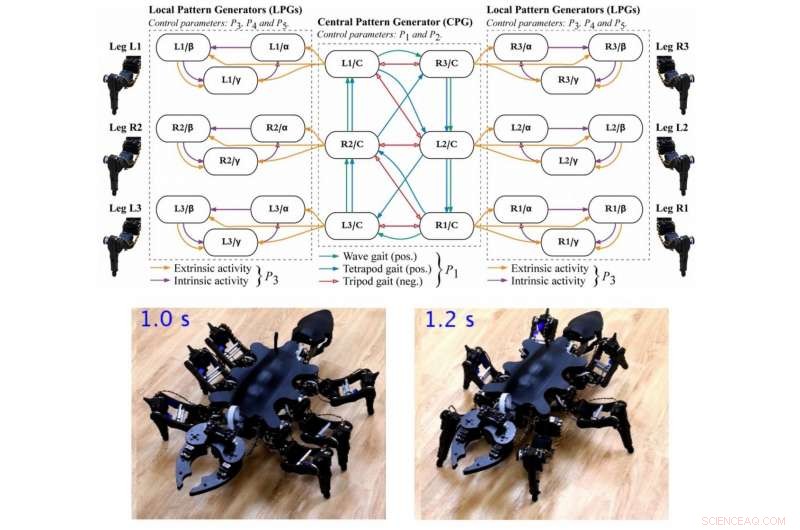
Øverst:Styringens arkitektur, viser den centrale mønstergenerator, som styrer det overordnede gangmønster, og på begge sider, de seks lokale mønstergeneratorer, som styrer individuelle benbaner. Nederst:Repræsentative stillbilleder af robotten, der går i en myrelignende stilling (til venstre) og en kakerlaklignende stilling (til højre). Kredit:IEEE ADGANG
Hovedforfatteren af undersøgelsen, Ludovico Minati, som også er tilknyttet det polske videnskabsakademi i Krakow, Polen og inviteret til Tokyo Tech's Institute of Innovative Research (IIR) gennem World Research Hub Initiative forklarer, at insekter hurtigt kan tilpasse deres gang afhængigt af en lang række faktorer, men især deres ganghastighed. Nogle gangarter observeres ofte og betragtes som kanoniske, men i virkeligheden, et næsten uendeligt antal gangarter er tilgængelige, og forskellige insekter som myrer og kakerlakker realiserer lignende gangarter i meget forskellige stillinger.
Der er blevet stødt på vanskeligheder, når man forsøger at kondensere så meget kompleksitet til kunstige mønstergeneratorer. Den foreslåede controller viser et ekstremt højt niveau af alsidighed takket være implementering baseret på feltprogrammerbare analoge arrays (FPAA'er), som tillader on-the-fly rekonfiguration og tuning af alle kredsløbsparametre. Det bygger på mange års tidligere forskning om ikke-lineære og kaotiske elektroniske netværk, som har demonstreret deres evne til at replikere fænomener observeret i biologiske hjerner, selv når den er tilsluttet i meget enkle konfigurationer.
"Det mest spændende øjeblik i forskningen var måske, da vi observerede robotten udstille fænomener og gangarter, som vi hverken designede eller forventede, og senere fandt ud af også findes i biologiske insekter, " siger Minati. Sådanne emergent fænomener opstår, især da netværket er realiseret med analoge komponenter og tillader en vis grad af selvorganisering, repræsenterer en tilgang, der adskiller sig meget fra konventionel teknik, hvor alt er designet a-priori og fikset. "Dette bringer os så meget tættere på den måde, biologi fungerer på, " tilføjer han.
Yasuharu Koike, også baseret på IIR, kommenterer:"Et vigtigt aspekt af controlleren er, at den kondenserer så meget kompleksitet til kun et lille antal parametre. Disse kan betragtes som parametre på højt niveau, ved at de udtrykkeligt sætter gang, hastighed, positur, osv. Fordi de kan ændres dynamisk, i fremtiden skulle det være nemt at variere dem i realtid ved hjælp af en hjerne-computer-grænseflade, lader styringen af kompleks kinematik ellers umuligt at dominere med nuværende tilgange."
Og Natsue Yoshimura, også baseret på IIR, siger:"Da controlleren reagerer gradvist og legemliggør en biologisk plausibel tilgang til mønstergenerering, vi tror, at det kan være mere problemfrit at køre i forhold til systemer, der afkoder diskrete kommandoer. Dette kan have praktiske konsekvenser, og vores laboratorium har betydelig knowhow på dette område."
Sidste artikelInternettilsynsmænd vægter webstedsejers privatliv
Næste artikelBali forbyder sociale medier til Silence Day
 Varme artikler
Varme artikler
-
 To robotter er bedre end én til NISTs 5G-antennemålingsforskningNISTs nye Large Antenna Positioning System (LAPS) bruger to robotarme til at måle og teste antenner til applikationer såsom avancerede kommunikationssystemer. Kredit:Burrus/NIST Forskere ved Natio
To robotter er bedre end én til NISTs 5G-antennemålingsforskningNISTs nye Large Antenna Positioning System (LAPS) bruger to robotarme til at måle og teste antenner til applikationer såsom avancerede kommunikationssystemer. Kredit:Burrus/NIST Forskere ved Natio -
 Understøtter den internationale tilpasning af forskningsdatastyringKredit:CC0 Public Domain Forskningsfinansieringsorganisationer, forskningsorganisationer, og enkelte forskere har forskellige behov og krav, når det kommer til forskningsdatastyring (RDM). Science
Understøtter den internationale tilpasning af forskningsdatastyringKredit:CC0 Public Domain Forskningsfinansieringsorganisationer, forskningsorganisationer, og enkelte forskere har forskellige behov og krav, når det kommer til forskningsdatastyring (RDM). Science -
 Mastercard køber Nets -betalingstjenester for 3,2 milliarder dollarBrugte 3,2 milliarder dollar på realtid betalingsevne Det amerikanske finanstjenesteselskab MasterCard har indvilliget i at erhverve det danske betalingstjenesteselskab Nets konto-til-konto betali
Mastercard køber Nets -betalingstjenester for 3,2 milliarder dollarBrugte 3,2 milliarder dollar på realtid betalingsevne Det amerikanske finanstjenesteselskab MasterCard har indvilliget i at erhverve det danske betalingstjenesteselskab Nets konto-til-konto betali -
 Brandbeklædning har været kendt i årevis. Livet afhænger af at handle nu, uden flere forsinkelse…Kredit:CC0 Public Domain Branden i Neo200 -bygningen på Spencer Street i Melbourne CBD i denne uge har uhyggelige ligheder med Grenfell Tower -katastrofen. Heldigvis, i stedet for 72 mennesker død
Brandbeklædning har været kendt i årevis. Livet afhænger af at handle nu, uden flere forsinkelse…Kredit:CC0 Public Domain Branden i Neo200 -bygningen på Spencer Street i Melbourne CBD i denne uge har uhyggelige ligheder med Grenfell Tower -katastrofen. Heldigvis, i stedet for 72 mennesker død
- Den sovjetiske rumprograms skjulte kunstner
- Sådan konverteres centimeter til centimeter squared
- Britiske videnskabsmænd åbner adgang til videnskab gennem gør-det-selv-udstyr
- Den asymmetriske syntese af halogenerede forbindelser fra carboxylsyrer er verdensførste
- Målrettet skovfornyelse:En plan for bevarelse af den tropiske biologiske mangfoldighed?
- Cementerer vores plads i rummet