


Hvordan selvkørende biler kunne skrumpe parkeringspladser
Venstre mod højre:Sina Bahrami, Mehdi Nourinejad og professor Matthew Roorda designede en algoritme til at optimere designet af parkeringspladser til autonome køretøjer, øge deres kapacitet med i gennemsnit 62 pct. Kredit:Roberta Baker
Ny U of T Engineering-forskning viser, at indførelse af selvkørende biler - også kendt som autonome køretøjer (AV'er) - kan reducere mængden af værdifuldt byrum, der er dedikeret til parkering betydeligt.
"På en parkeringsplads fuld af AV'er, du behøver ikke åbne dørene, så de kan parkere med meget lidt plads imellem, " siger professor Matthew Roorda, seniorforfatter til en ny undersøgelse i Transportforskning, del B . "Du behøver heller ikke at efterlade plads til hver bil at køre ud, fordi du kan signalere de omgivende AV'er til at bevæge sig af vejen."
Mens traditionelle parkeringspladser er konfigureret til "øer" af biler, der hver kan trække ind eller ud af et sted, en AV-parkeringsplads kunne ligne et solidt gitter, med ydre biler, der flytter til side efter behov for at lade de indre biler komme ind og ud. Forskernes udfordring var at bestemme den optimale størrelse af gitteret for at maksimere opbevaring og samtidig minimere antallet af træk, der kræves for at udvinde en given bil.
"Der er en afvejning, " siger Mehdi Nourinejad, en nyuddannet ph.d.-uddannet fra Institut for Byggeri og Anlæg og studiets hovedforfatter. "Hvis du har et meget stort gitter, det fører til mange flytninger, hvilket betyder, at det i gennemsnit tager længere tid at hente dit køretøj. På den anden side, hvis du har et antal mindre gitter, det spilder meget plads."
Nourinejad, Roorda og deres medforfatter Sina Bahrami skabte en computermodel, hvor de kunne simulere virkningerne af forskellige layouts til AV-parkeringspladser. De brugte derefter en algoritme til at optimere designet til forskellige faktorer, herunder at minimere antallet af flytninger og maksimere andelen af grunden, der blev brugt til parkering kontra baner til flytning, ind eller ud.
Deres analyse viste, at for et givet antal biler, en veldesignet AV-parkeringsplads kunne rumme 62 procent flere biler end en konventionel. Afhængigt af parkeringspladsens dimensioner, i nogle tilfælde var de i stand til at øge kapaciteten yderligere - firkantede AV-parkeringspladser kunne rumme op til 87 procent flere biler. Denne forbedrede udnyttelse af pladsen kunne udmønte sig i meget mindre fodspor på parkeringspladsen, forudsat at det samlede antal biler, der skal parkere i dem, forbliver konstant.
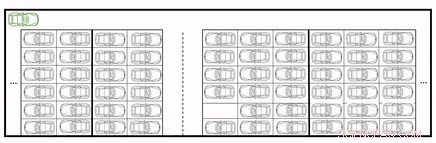
Denne animation viser, hvordan parkering kunne fungere i partier dedikeret til autonome køretøjer. Biler i de yderste rækker af gitteret kan bevæge sig ud af vejen for at tillade biler i midten at flygte. Kredit:Sina Bahrami
En anden fordel ved AV-parkeringspladser er, at designet ikke ligger fast. "Hvis efterspørgslen ændrer sig - f.eks. hvis du har brug for at pakke flere biler ind på pladsen - behøver du ikke male nye parkeringspladser, " siger Bahrami. "I stedet, operatøren kan bare signalere bilerne til at omarrangere sig. Det vil tage længere tid at hente dit køretøj, men du får plads til flere biler."
Roorda håber, at kommunale parkeringsmyndigheder vil kunne bruge deres designtilgang til at forbedre byrum. "Lige nu, vores bykerner har gigantiske kommunale parkeringspladser ved siden af store attraktioner, " siger han. "AV'er kunne give os mulighed for både at skrumpe og flytte disse parkeringspladser, åbner op for værdifuld plads i byerne."
Konceptet med en AV, der kører og afleverer en passager, Det lyder attraktivt at navigere til en ultraeffektiv AV-parkeringsplads og senere vende tilbage for at hente passageren. Men dette nye paradigme kunne også introducere negative konsekvenser, såsom en potentiel stigning i trafikpropper.
"Lige nu, vi har mange biler på vejen med kun én passager, " siger Roorda. "Hvis vi placerer AV-parkeringspladser for langt væk fra store attraktioner, vi kunne ende med gader fyldt med køretøjer, der ikke har nogen passagerer, hvilket ville være værre."
En anden ulempe er, at teamets design kun virker til parkeringspladser, der udelukkende er forbeholdt AV'er, snarere end en blanding af AV'er og konventionelle køretøjer, selvom Roorda siger, at et enkelt parti kunne have både AV- og ikke-AV-områder.
Roorda og hans team kan heller ikke forudsige, hvornår antallet af AV'er på vejen vil nå den kritiske masse, der kræves for at bruge deres designs.
"Vi taler om et stort antal køretøjer, der fuldt ud kan køre selv, uden krav om, at en chauffør skal tage over, hvis noget går galt, " siger Roorda. "Der er meget, der skal ske, før vi når til det stadie."
 Varme artikler
Varme artikler
-
 Corona-kontaktsporingsappen logger ikke din placering, men det vil afsløre, hvem du hænger ud medKredit:Edgar Su/Reuters Den føderale regering har annonceret planer om at introducere en kontaktsporingsmobilapp for at hjælpe med at bremse spredningen af COVID-19 i Australien. Imidlertid, i
Corona-kontaktsporingsappen logger ikke din placering, men det vil afsløre, hvem du hænger ud medKredit:Edgar Su/Reuters Den føderale regering har annonceret planer om at introducere en kontaktsporingsmobilapp for at hjælpe med at bremse spredningen af COVID-19 i Australien. Imidlertid, i -
 Google søskende lancerer sandelig COVID-19 screeningwebstedI denne 14. februar, 2018, filfoto vises logoet for Alphabet på en skærm på Nasdaq MarketSite i New York. Google søsterselskab Verily har lanceret et websted for at screene folk, der tror, at de mås
Google søskende lancerer sandelig COVID-19 screeningwebstedI denne 14. februar, 2018, filfoto vises logoet for Alphabet på en skærm på Nasdaq MarketSite i New York. Google søsterselskab Verily har lanceret et websted for at screene folk, der tror, at de mås -
 Japans nye Airbnb-lov:et tveægget sværdDer vil sandsynligvis være stor efterspørgsel efter korttidsudlejning under OL i 2020 i Tokyo Udlejningsplatforme som Airbnb håber på et løft fra en ny lov, der træder i kraft næste måned i Japan
Japans nye Airbnb-lov:et tveægget sværdDer vil sandsynligvis være stor efterspørgsel efter korttidsudlejning under OL i 2020 i Tokyo Udlejningsplatforme som Airbnb håber på et løft fra en ny lov, der træder i kraft næste måned i Japan -
 Probabilistisk computing tager kunstig intelligens til det næste trinKredit:CC0 Public Domain Den potentielle effekt af kunstig intelligens (AI) har aldrig været større - men vi får kun succes, hvis AI kan levere smartere og mere intuitive svar. En vigtig barriere
Probabilistisk computing tager kunstig intelligens til det næste trinKredit:CC0 Public Domain Den potentielle effekt af kunstig intelligens (AI) har aldrig været større - men vi får kun succes, hvis AI kan levere smartere og mere intuitive svar. En vigtig barriere
- Når den sidder fast i vand, bier skaber en bølge og flyver oven på den, undersøgelse finder
- Trods forbrugernes bekymringer, luftfartens fremtid vil være mere automatiseret
- Retsmedicinske forskere finder mere præcis måde at estimere afdødes alder
- Her kommer den nye generation af klimamodeller:Fremtiden for nedbør i Alperne
- Historien om eksponenter
- Livets mission:en drone på Titan i 2034 (Opdatering)