


Software genererer automatisk strikkeinstruktioner til 3D-former
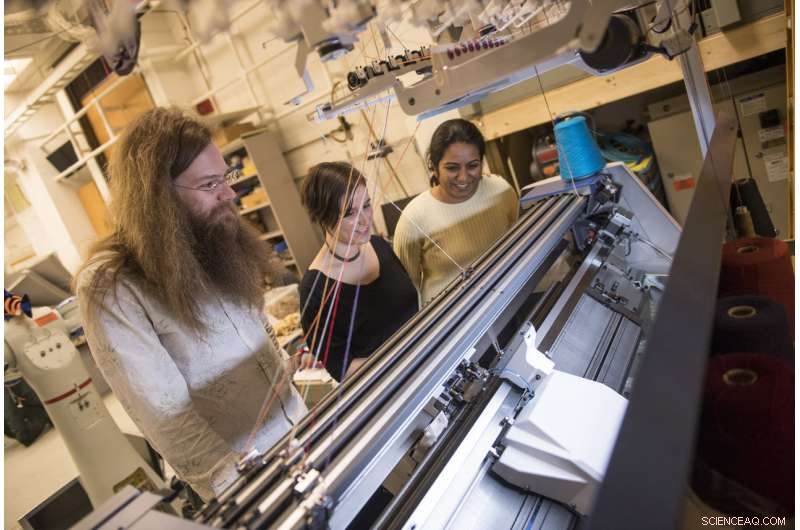
James McCann, adjunkt i robotteknologi, og Carnegie Mellon kandidatstuderende Lea Albaugh og Vidya Narayanan tjekker en computerstyret strikkemaskine. Deres system oversætter en 3-D former til søm-for-sting instruktioner, så maskinen automatisk kan producere dem. Kredit:Carnegie Mellon University/Michael Henninger
Computerforskere fra Carnegie Mellon University har udviklet et system, der kan oversætte en lang række 3-D-former til søm-for-søm-instruktioner, der gør det muligt for en computerstyret strikkemaskine automatisk at producere disse former.
Forskere i Carnegie Mellon Textiles Lab har brugt systemet til at producere en række forskellige plyslegetøj og beklædningsgenstande. Hvad mere er, James McCann, adjunkt i Robotics Institute og leder af laboratoriet, sagde, at denne evne til at generere strikkeinstruktioner uden behov for menneskelig ekspertise kunne gøre on-demand maskinstrik mulig.
McCanns vision er at bruge de samme maskiner, som rutinemæssigt slår tusindvis af strikkede huer frem, handsker og andet tøj til at producere skræddersyede stykker en ad gangen eller i små mængder. Handsker, for eksempel, kan være designet til at passe præcist til en kundes hænder. Atletisk sko overdel, trøjer og hatte kan have unikke farvemønstre eller ornamenter.
"Strikkemaskiner kan blive lige så nemme at bruge som 3-D-printere, "Sagde McCann.
Det står i skarp kontrast til strikkeverdenen i dag.
"Nu, hvis du kører et gulv med strikkemaskiner, du har også en afdeling af ingeniører, sagde McCann, der bemærkede, at beklædningsdesignere sjældent har den specialiserede ekspertise, der er nødvendig for at programmere maskinerne. "Det er ikke en bæredygtig måde at lave engangs-tilpassede stykker.
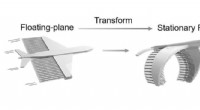
I deres seneste arbejde, præsenteres til sommer på SIGGRAPH 2018, konferencen om computergrafik og interaktive teknikker i Vancouver, Canada, McCann og hans kolleger udviklede en metode til at transformere 3-D-masker-en almindelig metode til modellering af 3D-former-til instruktioner til V-sengstrikkemaskiner.

Denne plys, udstoppet kanin blev automatisk fremstillet af et 3-D-net ved hjælp af et Carnegie Mellon University-system til automatisk at oversætte formen til sting-by-sting instruktioner til en strikkemaskine Kredit:Carnegie Mellon University/Michael Henninger
Disse meget anvendte maskiner manipulerer garnsløjfer med krogformede nåle, som ligger i parallelle nåleleje vinklet mod hinanden i en omvendt V-form. Maskinerne er yderst dygtige, men er begrænset i sammenligning med håndstrikning, sagde Vidya Narayanan, en ph.d. studerende i datalogi.
CMU -algoritmen tager disse begrænsninger i betragtning, hun sagde, producere instruktioner til mønstre, der virker inden for maskinens grænser og reducerer risikoen for garnbrud eller fastklemning.
Et frontend-designsystem som dette er almindeligt i 3D-print og i computerdrevne maskinværksteder, men ikke i strikkeverdenen, sagde McCann. Ligeledes, 3-D print og maskinværksteder bruger almindelige sprog og filformater til at køre deres udstyr, mens strikkemaskiner bruger en række forskellige sprog og værktøjer, der er specifikke for bestemte mærker af strikkemaskiner.McCann førte en tidligere indsats for at skabe et fælles strikkeformat, kaldet Knitout, som er i stand til at blive implementeret med ethvert mærke af strikkemaskine.
Yderligere arbejde er nødvendigt for at gøre strikning på forespørgsel til virkelighed. For eksempel, systemet producerer nu kun glat strikket klud, uden de mønstrede syninger, der kan gøre strikkede beklædningsgenstande karakteristiske. Strikkeøkosystemet skal også udvides, med designværktøjer, der fungerer med enhver maskine. Men fremskridtet kan være hurtigt på dette tidspunkt, sagde McCann.
"Strikkeudstyret er allerede rigtig godt, "forklarede han." Det er softwaren, der har brug for et lille skub. Og software kan forbedres hurtigt, fordi vi kan gentage så meget hurtigere. "
Ud over McCann og Narayanan, forskergruppen omfattede Jessica Hodgins, professor i datalogi og robotik; Lea Albaugh, en ph.d. studerende i Human-Computer Interaction Institute; og Stelian Coros, et fakultetsmedlem ved ETH Zürich og en adjungeret professor i robotteknologi på CMU.
Forskningspapiret, sammen med en video, er tilgængelig på GitHub.
 Varme artikler
Varme artikler
-
 Buffetts firma køber 75 millioner flere Apple-aktier i 1. kvartalI denne 3. nov. 2017, fil foto, Apple iPhone X er udstillet i den nye Apple Michigan Avenue-butik langs Chicago-floden i Chicago. Warren Buffetts selskab købte 75 millioner flere Apple-aktier i første
Buffetts firma køber 75 millioner flere Apple-aktier i 1. kvartalI denne 3. nov. 2017, fil foto, Apple iPhone X er udstillet i den nye Apple Michigan Avenue-butik langs Chicago-floden i Chicago. Warren Buffetts selskab købte 75 millioner flere Apple-aktier i første -
 Legetøjstransformatorer og virkelige hvaler inspirerer biohybrid robotForskere skabte en fjernstyret blød robot, der kan transformere sig selv til at udføre målrettet lægemiddellevering mod kræftceller. Kredit:City University of Hong Kong Henter inspiration fra biol
Legetøjstransformatorer og virkelige hvaler inspirerer biohybrid robotForskere skabte en fjernstyret blød robot, der kan transformere sig selv til at udføre målrettet lægemiddellevering mod kræftceller. Kredit:City University of Hong Kong Henter inspiration fra biol -
 Patent talk:Mobil enhed med solpanelerSkal vi forvente at se en fremtidig Surface Pro med solpaneler? Microsoft har tænkt på en idé om solenergi som tydelig i et patent, som teknologigiganten indgav til USPTO, nemlig, Cover til mobil enhe
Patent talk:Mobil enhed med solpanelerSkal vi forvente at se en fremtidig Surface Pro med solpaneler? Microsoft har tænkt på en idé om solenergi som tydelig i et patent, som teknologigiganten indgav til USPTO, nemlig, Cover til mobil enhe -
 Stemmeaktiveret monopol fortæller spillerne:Du er konkurs!Med Monopoly Voice Banking, Hasbro bringer sit elskede spil ind i en æra med stemmeassistenter:en elektronisk version af Monopolys tophat sidder midt på brættet, tale - og lytte - til spillere Hvi
Stemmeaktiveret monopol fortæller spillerne:Du er konkurs!Med Monopoly Voice Banking, Hasbro bringer sit elskede spil ind i en æra med stemmeassistenter:en elektronisk version af Monopolys tophat sidder midt på brættet, tale - og lytte - til spillere Hvi