


En ny måde at bygge vejkort fra luftbilleder automatisk
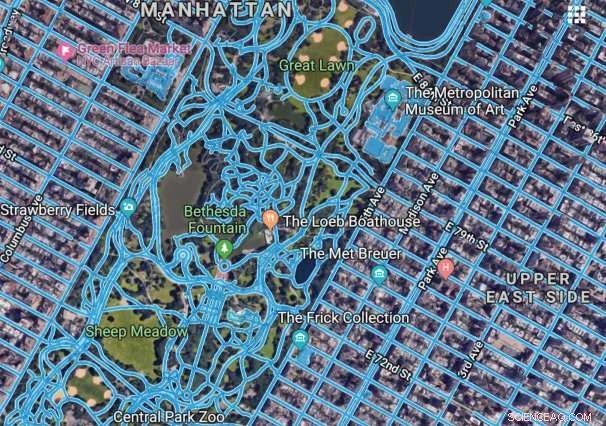
For at skabe komplette kørekort skal virksomheder som Google ofte have medarbejdere til at tage eksisterende luftbilleder med ufuldstændig information og manuelt udfylde hullerne. Kredit:Massachusetts Institute of Technology
Kort-apps kan have ændret vores verden, men de har stadig ikke kortlagt det hele endnu. Specifikt, kortlægning af veje kan være svært og kedeligt:Selv efter at have taget luftbilleder, virksomheder skal stadig bruge mange timer på manuelt at spore veje. Som resultat, selv virksomheder som Google er endnu ikke nået til at kortlægge langt størstedelen af de mere end 20 millioner miles af veje over hele kloden.
Huller i kort er et problem, især for systemer, der udvikles til selvkørende biler. For at løse problemet, forskere fra MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) har skabt RoadTracer, en automatiseret metode til at bygge vejkort, der er 45 procent mere nøjagtige end eksisterende tilgange.
Brug af data fra luftbilleder, holdet siger, at RoadTracer ikke bare er mere præcis, men mere omkostningseffektive end de nuværende metoder. MIT-professor Mohammad Alizadeh siger, at dette arbejde vil være nyttigt både for teknologigiganter som Google og for mindre organisationer uden ressourcer til at kurere og rette store mængder fejl i kort.
"RoadTracer er velegnet til at kortlægge områder af verden, hvor kort ofte er forældede, som omfatter både steder med lavere befolkningstal og områder, hvor der er hyppigt byggeri, " siger Alizadeh, en af medforfatterne til et nyt papir om systemet. "For eksempel, eksisterende kort for fjerntliggende områder som landdistrikterne i Thailand mangler mange veje. RoadTracer kunne hjælpe med at gøre dem mere præcise."
For eksempel, ser på luftbilleder af New York City, RoadTracer kunne kortlægge 44 procent af sine vejkryds korrekt, hvilket er mere end dobbelt så effektivt som traditionelle tilgange baseret på billedsegmentering, der kun kunne kortlægge 19 pct.
Papiret, som vil blive præsenteret i juni på konferencen om computersyn og mønstergenkendelse (CVPR) i Salt Lake City, Utah, er et samarbejde mellem CSAIL og Qatar Computing Research Institute (QCRI).
Alizadehs MIT-medforfattere inkluderer kandidatstuderende Fayven Bastani og Songtao He, og professorer Hari Balakrishnan, Sam Madden, og David DeWitt. QCRI medforfattere inkluderer senior softwareingeniør Sofiane Abbar og Sanjay Chawla, der er forskningsdirektør for QCRI's Data Analytics Group.
Nuværende bestræbelser på at automatisere kort involverer træning af neurale netværk til at se på luftbilleder og identificere individuelle pixels som enten "vej" eller "ikke vej." Fordi luftbilleder ofte kan være tvetydige og ufuldstændige, sådanne systemer kræver også et efterbehandlingstrin, der har til formål at forsøge at udfylde nogle af hullerne.
Desværre, disse såkaldte "segmenterings"-tilgange er ofte upræcise:Hvis modellen fejlmærker en pixel, denne fejl vil blive forstærket i den endelige køreplan. Fejl er især sandsynlige, hvis luftbillederne har træer, bygninger, eller skygger, der skjuler, hvor veje begynder og slutter. (Efterbehandlingstrinnet kræver også, at der træffes beslutninger baseret på antagelser, der måske ikke altid holder stik, som at forbinde to vejstrækninger, simpelthen fordi de er ved siden af hinanden.)
I mellemtiden RoadTracer opretter kort trin-for-trin. Det starter på et kendt sted på vejnettet, og bruger et neuralt netværk til at undersøge det omkringliggende område for at bestemme, hvilket punkt der med størst sandsynlighed er den næste del på vejen. Det tilføjer så det punkt og gentager processen for gradvist at spore vejnettet et trin ad gangen.
"I stedet for at tage tusindvis af forskellige beslutninger på én gang om, hvorvidt forskellige pixels repræsenterer dele af en vej, RoadTracer fokuserer på det enklere problem med at finde ud af, hvilken retning man skal følge, når man starter fra et bestemt sted, som vi ved er en vej, " siger Bastani. "Dette er på mange måder faktisk meget tættere på, hvordan vi som mennesker konstruerer mentale modeller af verden omkring os."
Holdet trænede RoadTracer i luftbilleder af 25 byer i seks lande i Nordamerika og Europa, og evaluerede derefter dets kortlægningsevner på 15 andre byer.
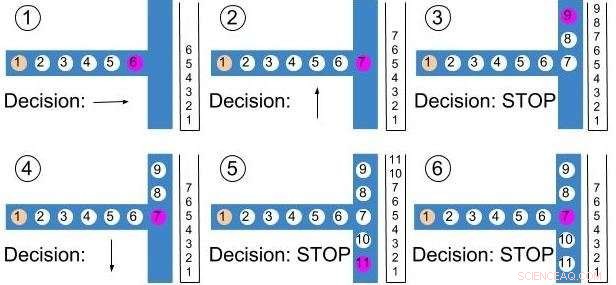
For at lave en køreplan, systemet starter på et kendt sted og bruger et neuralt netværk til at undersøge det omkringliggende område for at afgøre, hvilket punkt der med størst sandsynlighed er den næste del på vejen. Det tilføjer derefter det punkt og gentager processen for gradvist at spore vejen et trin ad gangen. Kredit:Massachusetts Institute of Technology
"Det er vigtigt for et kortlægningssystem at kunne præstere godt i byer, det ikke har trænet i, fordi regioner, hvor automatisk kortlægning holder mest lovende, er dem, hvor eksisterende kort er ikke-eksisterende eller unøjagtige, " siger Balakrishnan.
Bastani siger, at det faktum, at RoadTracer havde en fejlrate, der er 45 procent lavere, er afgørende for at gøre automatiske kortsystemer mere praktiske for virksomheder som Google.
"Hvis fejlprocenten er for høj, så er det mere effektivt at kortlægge vejene manuelt fra bunden i stedet for at fjerne forkerte segmenter fra det udledte kort, " siger Bastani.
Stadig, Implementering af noget som RoadTracer ville ikke tage folk helt ud af løkken:Holdet siger, at de kunne forestille sig, at systemet foreslår køreplaner for en stor region og derefter får en menneskelig ekspert til at dobbelttjekke designet.
"Det sagt, hvad der er klart er, at med et system som vores kan du dramatisk reducere mængden af kedeligt arbejde, som mennesker skal udføre, " siger Alizadeh.
Ja, en fordel ved RoadTracers inkrementelle tilgang er, at det gør det meget nemmere at rette fejl; menneskelige supervisorer kan simpelthen rette dem og køre algoritmen igen, hvor de slap, i stedet for at fortsætte med at bruge upræcis information, der siver ned til andre dele af kortet.
Selvfølgelig, luftbilleder er kun en brik i puslespillet. De giver dig ikke information om veje, der har over- og underføringer, da det er umuligt at fastslå ovenfra. Som resultat, holdet udvikler også separat algoritmer, der kan skabe kort fra GPS-data, og arbejder på at fusionere disse tilgange til et enkelt system til kortlægning.
Denne historie er genudgivet med tilladelse fra MIT News (web.mit.edu/newsoffice/), et populært websted, der dækker nyheder om MIT-forskning, innovation og undervisning.
 Varme artikler
Varme artikler
-
 Bør politiet bruge computere til at forudsige forbrydelser og kriminelle?I denne 29. juni, 2012 filbillede, Jeff Brantingham, antropologi professor ved University of California Los Angeles, viser en computergenereret visning af forudsigende politiarbejde, -zoner ved Los An
Bør politiet bruge computere til at forudsige forbrydelser og kriminelle?I denne 29. juni, 2012 filbillede, Jeff Brantingham, antropologi professor ved University of California Los Angeles, viser en computergenereret visning af forudsigende politiarbejde, -zoner ved Los An -
 WPA3-sikkerhedsprotokol holder Wi-Fi-forbindelser sikrereKredit:CC0 Public Domain Netværkseksperter, der gerne vil se trådløse sårbarheder fejet væk, kan nyde den gode nyhed, at Wi-Fi-sikkerhed har fået status som næste generation, efter 14 for lange år
WPA3-sikkerhedsprotokol holder Wi-Fi-forbindelser sikrereKredit:CC0 Public Domain Netværkseksperter, der gerne vil se trådløse sårbarheder fejet væk, kan nyde den gode nyhed, at Wi-Fi-sikkerhed har fået status som næste generation, efter 14 for lange år -
 Verizon afslutter salget af datadata til mæglereI denne tirsdag, 2. maj kl. 2017, fil foto, Verizon virksomhedsskiltning fanges i en butik i Manhattans Midtown -område, i New York. Verizon forpligter sig til at stoppe med at sælge data til udenfors
Verizon afslutter salget af datadata til mæglereI denne tirsdag, 2. maj kl. 2017, fil foto, Verizon virksomhedsskiltning fanges i en butik i Manhattans Midtown -område, i New York. Verizon forpligter sig til at stoppe med at sælge data til udenfors -
 Airbus udnævner ny administrerende direktør ved årets udgang:selskabAirbus er for nylig blevet svækket af store korruptionsundersøgelser i Storbritannien og Frankrig, samt Tyskland og Østrig, der har kastet en palle over en af Europas mest succesrige virksomheder
Airbus udnævner ny administrerende direktør ved årets udgang:selskabAirbus er for nylig blevet svækket af store korruptionsundersøgelser i Storbritannien og Frankrig, samt Tyskland og Østrig, der har kastet en palle over en af Europas mest succesrige virksomheder
- Ny forskning afslører hemmeligheden bag Jupiters nysgerrige nordlysaktivitet
- Biotiske faktorer for en Cheetah
- Rovios -aktier flyver højt på Angry Birds 2 -succesen
- Sådan beregnes termisk udvidelse af stål
- Tavlecomputerlærer er international konferencestjerne
- Udæmpet, udæmpet:Kampen om en unik europæisk flod