


Invertebrater inspirerer de første fuldt 3-D-printede aktive materialer til robotter
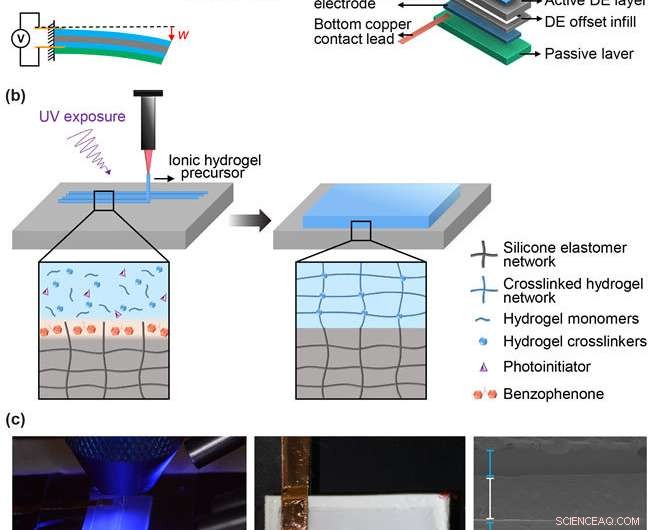
(a) Skematisk af en blød aktuatoranordning (venstre) og eksploderet afbildning af enheden og bestanddele af materialelag (højre). (b) Skematisk afsætning af (3D-print) hydrogel på overfladen af et silikonelag efter overfladebehandling og under UV-lyseksponering. (c) Udskrivning af den ioniske hydrogel på det passive lag efter overfladebehandling (venstre), endelig 3-D printet DEA (midten), og mikrostrukturbillede af enhedens tværsnit (højre). Kredit:U.S. Army
For at overvinde materialestivheden og aktiveringsbegrænsningerne i nuværende robotsystemer, et fælles U.S. Army Research Laboratory og University of Minnesota forskningsprojekt søgte inspiration hos hvirvelløse dyr.
Den amerikanske hær bruger robotter, der er strukturelt stive, gør dem upraktiske, når de udfører militære operationer i stærkt overbelastede og omstridte bymiljøer, hvor skjult manøvrering er afgørende for at opnå militær overlegenhed.
"Vellykket snigende manøvrering kræver høj strukturel fleksibilitet og distributionskontrol for at snige sig ind i lukkede eller begrænsede rum, fungere i længere perioder og efterligne biologiske morfologier og tilpasningsevne, " sagde Dr. Ed Habtour, ARL-forsker med speciale i ikke-lineær strukturel dynamik.
Ifølge Habtour, nuværende militærrobotter har to store begrænsninger, der begrænser dem i at efterligne biologiske organismers bevægelse.
Først, disse robotter mangler den nødvendige dynamiske fleksibilitet, da de for det meste er samlet med stive mekaniske og elektroniske komponenter.
Sekund, stive robotter kræver komplekse mekanismer og elektriske kredsløb for at opnå aktiv aktivering og komplekse bevægelsesformer.
For at overvinde disse begrænsninger, et fælles ARL og UMN forskningsprojekt søgte inspiration hos hvirvelløse dyr.
Denne forskningsindsats førte til skabelsen af bløde aktuatorprototyper ved hjælp af aktive materialer med bemærkelsesværdigt justerbare parametre, såsom strukturel fleksibilitet, morfologi og dynamisk aktivering.
Prototypen er den første fuldt 3-D printede dielektriske elastomer aktuator, eller DEA, som kan udføre høj bøjningsbevægelse.
De 3-D-printede DEA'er udviste betydeligt større afbøjninger, tre gange mere end andre nyere eksempler i videnskabelig litteratur.
Disse resultater blev offentliggjort i Ekstreme mekanik bogstaver (EML) i et papir med titlen:"3-D printede elektrisk drevne bløde aktuatorer", 2018.
"I den indledende fase af projektet, vores team begyndte med at undersøge nye metoder til at efterligne hvirvelløse dyrs bevægelse, som gav grundlæggende indsigt i maskinerne i deres bløde distribuerede aktiveringskredsløb, der tillader høje bøjningsbevægelser uden skeletstøtte, " sagde professor Michael McAlpine fra UMN.

Dr. Ed Habtour arbejder i US Army Research Laboratory's Vehicle Technology Directorate, hvor han har specialiseret sig i ikke-lineære dynamiske systemer. Kredit:US Army foto af Conrad Johnson
Forståelse af de medfødte mekanismer af den distributive aktivering observeret i naturen hjalp teamet med at identificere de vigtige parametre, der kan manipuleres for at udføre nye funktioner, såsom at opnå meget fleksible bevægelsesformer.
Ifølge McAlpine, at opnå videnskabelig indsigt i vigtigheden af disse parametre, det var nødvendigt først at bygge og teste en prototype, der ligner aktuatorer, der findes i naturen via en specialbygget 3-D printplatform, og derefter udvikle en samlet matematisk model til at studere følsomheden af hver parameter og forudsige de forskellige optimale aktiveringsmekanismer.
UMN 3-D printede distribuerede aktiveringskredsløb, der involverer bløde, strækbare materialer med mekaniske egenskaber svarende til biologiske organismer som blæksprutter og orme.
ARL skabte en generaliseret model ved hjælp af en energisk formuleringstilgang, som var nøglen til at identificere to vigtige mekanismer til at muliggøre høj bøjningsbevægelse i bløde biologiske aktuatorer:(i) tuning af fysiske egenskaber (mekaniske og geometriske) via udnyttelse af samspillet mellem materialerne og dynamiske ulineariteter til at øge bevægelsen; og (ii) fremhævelse af den elektromekaniske kobling mellem det elektriske felt og ikke-lineær strukturel stivhed gennem de distributive aktiveringskredsløb.
"Forskningsresultaterne repræsenterer et vigtigt skridt på vejen mod at give Solider en selvstændig friformsfremstillingsplatform - næste generations 3-D-printer, som kan udskrive funktionelle materialer og enheder - for at generere bløde aktuatorer og potentielt tøjleløse bløde robotter efter behov, på farten og når det er nødvendigt, " sagde Habtour.
Habtour bemærkede, at forskningen også tyder på, at bløde aktuatorer kan være de bedste kandidater til autonom additiv fremstilling på slagmarken.
"I modsætning til nuværende 3-D-printede DEA'er, den nye fremstillingsmetode kræver ikke efterbehandlingstrin, såsom montering, tørring eller udglødning, " sagde hovedforfatter Ghazaleh Haghiashtiani. "Med den nye 3-D printmetode, Solideren kan drage fordel af de unikke aktiveringsegenskaber ved bløde DEA'er på det grundlæggende materialeniveau med opløsning og kompleksitet i mikroskala, med minimal forudgående ekspertise."
Med hensyn til de næste skridt, Habtour sagde, at hensigten er at udvikle de eksperimentelle og teoretiske principper, der styrer samspillet mellem interne grænseflader og kinetik af interaktioner i tidsvariante systemer observeret i biologiske organismer, som sikrer deres fleksible bevægelse og modstandskraft.
"De spændende interaktioner mellem materialernes mikromekaniske egenskaber og forskellige ikke-lineariteter kan give nye videnskabelige muligheder for at efterligne de symbiotiske interaktioner i biologiske systemer, " sagde Habtour. "Hvis vi kan forstå disse interaktioner, så kan vi bruge denne indsigt til at fremstille dynamiske strukturer og fleksible robotter, der er designet til at være selvbevidste, selvsansende og i stand til at justere deres morfologier og egenskaber i realtid for at tilpasse sig et utal af ydre og indre forhold."
Med dette, Habtour udtalte, at implikationerne vil være at opdage nye dynamikker i levende strukturer og efterligne dem, at fremstille funktionelt komplekse strukturer og enheder selvstændigt, og udnyttelse af nye aktiveringsmåder, der ikke er opnåelige i konventionelle robot- og mekaniske systemer.
Sidste artikelHvorfor elbilrevolutionen vil bringe sine egne problemer
Næste artikelEn ny måde at bygge vejkort fra luftbilleder automatisk
 Varme artikler
Varme artikler
-
 Hvor er min pakke? Almindelige fragtskabe kan lette bytrafikken og forhindre mislykkede leverancerAlmindelig luftfartsselskabs pilottest ved Seattle Municipal Tower. Vist:Chris Eaves og Jude Willcher, Seattle Department of Transportation, og Barbara Ivanov, Urban Freight Lab. Kredit:Barbara Ivanov
Hvor er min pakke? Almindelige fragtskabe kan lette bytrafikken og forhindre mislykkede leverancerAlmindelig luftfartsselskabs pilottest ved Seattle Municipal Tower. Vist:Chris Eaves og Jude Willcher, Seattle Department of Transportation, og Barbara Ivanov, Urban Freight Lab. Kredit:Barbara Ivanov -
 Beyond Netflix:Disney Plus slutter sig til streamingkampenI denne 8. aug. 2017, fil foto, Walt Disney Co.-logoet vises på en skærm over gulvet på New York Stock Exchange. På tirsdag, 12. nov., Disney Plus lancerer sin streamingtjeneste. (AP Photo/Richard Dre
Beyond Netflix:Disney Plus slutter sig til streamingkampenI denne 8. aug. 2017, fil foto, Walt Disney Co.-logoet vises på en skærm over gulvet på New York Stock Exchange. På tirsdag, 12. nov., Disney Plus lancerer sin streamingtjeneste. (AP Photo/Richard Dre -
 Robotskind gør hverdagens objekter til robotterNy Robotic Skins teknologi udviklet af Yale -forskere giver brugerne mulighed for at gøre dagligdags objekter til robotter. Kredit:Yale University Når du tænker på robotik, du tænker sandsynligvis
Robotskind gør hverdagens objekter til robotterNy Robotic Skins teknologi udviklet af Yale -forskere giver brugerne mulighed for at gøre dagligdags objekter til robotter. Kredit:Yale University Når du tænker på robotik, du tænker sandsynligvis -
 Bruger 60 % mindre vand i papirproduktionKredit:istock En EPFL-forsker har udviklet en matematisk model til at optimere varmeoverførslen på fabrikker og dramatisk reducere vand- og energiforbruget. Modellen kunne, i teorien, reducere van
Bruger 60 % mindre vand i papirproduktionKredit:istock En EPFL-forsker har udviklet en matematisk model til at optimere varmeoverførslen på fabrikker og dramatisk reducere vand- og energiforbruget. Modellen kunne, i teorien, reducere van