


Det første trådløse flyvende robotinsekt letter
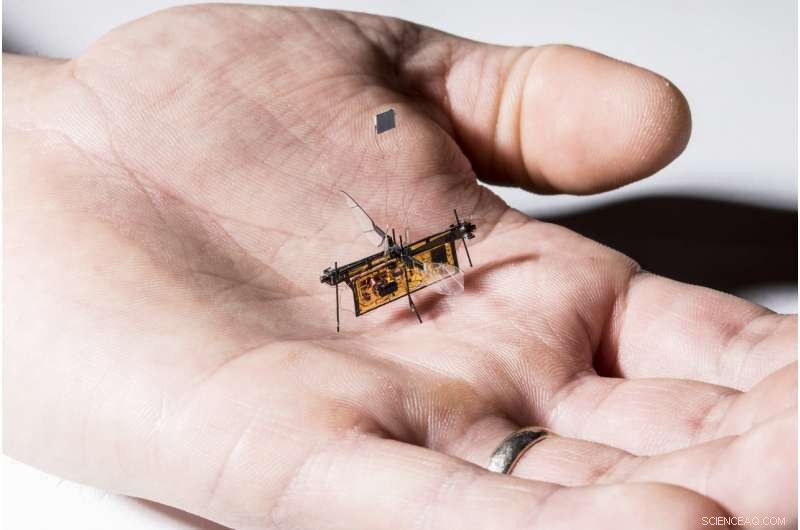
RoboFly, den første trådløse flyvende robot på størrelse med insekter, er lidt tungere end en tandstikker. Kredit:Mark Stone/University of Washington
Flyvende robotter på størrelse med insekter kan hjælpe med tidskrævende opgaver som at undersøge afgrødevækst på store gårde eller opsnuse gaslækager. Disse robotter svæver ved at flagre med små vinger, fordi de er for små til at bruge propeller, som dem der ses på deres større dronefætre. Lille størrelse er fordelagtig:Disse robotter er billige at lave og kan nemt glide ind på trange steder, der er utilgængelige for store droner.
Men nuværende flyvende robo-insekter er stadig bundet til jorden. Den elektronik, de skal bruge for at drive og kontrollere deres vinger, er for tung til, at disse miniaturerobotter kan bære.
Nu, ingeniører ved University of Washington har for første gang klippet snoren over og tilføjet en hjerne, giver deres RoboFly mulighed for at tage sine første uafhængige flaps. Dette kan være en lille klap til en robot, men det er et kæmpe spring for robot-art. Holdet vil præsentere sine resultater den 23. maj på den internationale konference om robotteknologi og automatisering i Brisbane, Australien.
RoboFly er lidt tungere end en tandstikker og drives af en laserstråle. Den bruger et lille indbygget kredsløb, der konverterer laserenergien til nok elektricitet til at betjene sine vinger.
"Før nu, konceptet med trådløse flyvende robotter på størrelse med insekter var science fiction. Ville vi nogensinde være i stand til at få dem til at fungere uden brug af en ledning?" sagde medforfatter Sawyer Fuller, en adjunkt i UW Department of Mechanical Engineering. "Vores nye trådløse RoboFly viser, at de er meget tættere på det virkelige liv."
Den tekniske udfordring er blaffen. Vingeklap er en magtkrævende proces, og både strømkilden og controlleren, der styrer vingerne, er for store og omfangsrige til at køre ombord på en lille robot. Så Fullers tidligere robo-insekt, RoboBee, havde en snor - den fik strøm og kontrol gennem ledninger fra jorden.
Men en flyvende robot burde kunne operere på egen hånd. Fuller og team besluttede at bruge en smal usynlig laserstråle til at drive deres robot. De pegede laserstrålen mod en fotovoltaisk celle, som er fastgjort over RoboFly og omdanner laserlyset til elektricitet.
"Det var den mest effektive måde hurtigt at overføre en masse strøm til RoboFly uden at tilføje meget vægt, " sagde medforfatter Shyam Gollakota, en lektor ved UW's Paul G. Allen School of Computer Science &Engineering.
Stadig, laseren alene giver ikke nok spænding til at bevæge vingerne. Derfor designede holdet et kredsløb, der forstærkede de syv volt, der kom ud af solcellecellen, op til de 240 volt, der var nødvendige for at flyve.

For at drive RoboFly pegede ingeniørerne en usynlig laserstråle (vist her i rød laser) mod en fotovoltaisk celle, som er fastgjort over robotten og omdanner laserlyset til elektricitet. Kredit:Mark Stone/University of Washington
For at give RoboFly kontrol over sine egne vinger, ingeniørerne gav en hjerne:De tilføjede en mikrocontroller til det samme kredsløb.
"Mikrocontrolleren fungerer som en rigtig fluehjerne, der fortæller vingemusklerne, hvornår de skal skyde, " sagde medforfatter Vikram Iyer, en ph.d.-studerende i UW Department of Electrical Engineering. "På RoboFly, den fortæller vingerne ting som 'klap hårdt nu' eller 'du må ikke klappe'."
Specifikt, controlleren sender spænding i bølger for at efterligne flagren af et rigtigt insekts vinger.
"Den bruger pulser til at forme bølgen, " sagde Johannes James, hovedforfatteren og en maskiningeniørdoktorand. "For at få vingerne til at slå hurtigt frem, den sender en række pulser i hurtig rækkefølge og sænker derefter pulseringen, når du nærmer dig toppen af bølgen. Og så gør den det omvendt for at få vingerne til at klappe jævnt i den anden retning."

For at gøre RoboFly trådløs, ingeniørerne designede et fleksibelt kredsløb (gult) med en boost-konverter (kobberspole og sorte kasser til venstre), der booster de syv volt, der kommer fra solcellecellen, til de 240 volt, der er nødvendige for at flyve. Dette kredsløb har også en mikrocontroller-hjerne (sort firkantet boks øverst til højre), der lader RoboFly styre sine vinger. Kredit:Mark Stone/University of Washington
For nu, RoboFly kan kun lette og lande. Når dens fotovoltaiske celle er uden for laserens direkte synslinje, robotten løber tør for strøm og lander. Men holdet håber snart at være i stand til at styre laseren, så RoboFly kan svæve og flyve rundt.
Mens RoboFly i øjeblikket drives af en laserstråle, fremtidige versioner kunne bruge bittesmå batterier eller høste energi fra radiofrekvenssignaler, sagde Gollakota. Den vej, deres strømkilde kan modificeres til specifikke opgaver.
Future RoboFlies kan også se frem til mere avancerede hjerner og sensorsystemer, der hjælper robotterne med at navigere og fuldføre opgaver på egen hånd, sagde Fuller.
"Jeg vil rigtig gerne lave en, der finder metanlækager, " sagde han. "Du kunne købe en kuffert fuld af dem, åbne den op, og de ville flyve rundt i din bygning og lede efter gasfaner, der kom ud af utætte rør. Hvis disse robotter kan gøre det nemt at finde lækager, de vil være meget mere tilbøjelige til at blive lappet, hvilket vil reducere udledningen af drivhusgasser. Dette er inspireret af rigtige fluer, som er rigtig gode til at flyve rundt og lede efter ildelugtende ting. Så vi synes, det er en god applikation til vores RoboFly."
 Varme artikler
Varme artikler
-
 Fleksible organiske elektroder bygget ved hjælp af vandforarbejdede sølv nanotrådeSEM billeder af de fleksible AgNEs elektroder. Kredit:Sun et al. Økologisk elektronisk udstyr, som er lavet af små molekyler eller polymerer (dvs. stoffer, der primært eller fuldstændigt er sammen
Fleksible organiske elektroder bygget ved hjælp af vandforarbejdede sølv nanotrådeSEM billeder af de fleksible AgNEs elektroder. Kredit:Sun et al. Økologisk elektronisk udstyr, som er lavet af små molekyler eller polymerer (dvs. stoffer, der primært eller fuldstændigt er sammen -
 EU efterforsker tyske bilproducenter for mulig samordningI denne onsdag, 2. august, 2017 filbillede, udstødningsrørene fra en VW Diesel-bil er fotograferet i Frankfurt, Tyskland. Den Europæiske Unions antitrustvagt undersøger, om bilproducenterne BMW, Daiml
EU efterforsker tyske bilproducenter for mulig samordningI denne onsdag, 2. august, 2017 filbillede, udstødningsrørene fra en VW Diesel-bil er fotograferet i Frankfurt, Tyskland. Den Europæiske Unions antitrustvagt undersøger, om bilproducenterne BMW, Daiml -
 Tysk Wikipedia blev mørklagt i protest mod EU's ophavsretsplanWikipedia logo. Wikipedias tysksprogede side er blevet mørklagt i protest mod et forslag om at ændre EUs ophavsretsregler. Besøgende på online-leksikonets tyske sektion blev torsdag mødt med en e
Tysk Wikipedia blev mørklagt i protest mod EU's ophavsretsplanWikipedia logo. Wikipedias tysksprogede side er blevet mørklagt i protest mod et forslag om at ændre EUs ophavsretsregler. Besøgende på online-leksikonets tyske sektion blev torsdag mødt med en e -
 IAEA opfordrer til en hurtig plan for oprensning af radioaktivt vand i FukushimaDet Internationale Atomenergiagenturs (IAEA) teamleder Christophe Xerri, Direktør for IAEAs afdeling for Nuclear Fuel Cycle and Waste Technology, lytter til et spørgsmål under en pressekonference om e
IAEA opfordrer til en hurtig plan for oprensning af radioaktivt vand i FukushimaDet Internationale Atomenergiagenturs (IAEA) teamleder Christophe Xerri, Direktør for IAEAs afdeling for Nuclear Fuel Cycle and Waste Technology, lytter til et spørgsmål under en pressekonference om e
- Mørk materie orkan giver mulighed for at opdage aksioner
- Nyt værktøj til at hjælpe byggeindustrien med at reducere CO2-fodaftrykket
- Udviklere præsenterer ledende belægninger til fleksible berøringsskærme
- Kun 15 dage tilbage til en aftale for at redde det skrantende flyselskab Alitalia
- Baser bruges som almindelige husholdningsartikler
- Kan matematik forudsige, hvad du vil gøre næste gang?