


Visuel semantik muliggør højtydende stedgenkendelse fra modsatte synspunkter

Kredit:Queensland University of Technology
QUT -forskere har udviklet en ny måde for robotter at se verden fra et mere menneskeligt perspektiv, som har potentiale til at forbedre hvordan teknologi, såsom førerløse biler og industrielle og mobile robotter, fungerer og interagerer med mennesker.
I det, der menes at være en verden først, Ph.d. studerende Sourav Garg, Dr. Niko Suenderhauf og professor Michael Milford fra QUT's Science and Engineering Faculty og Australian Center for Robotic Vision, har brugt visuel semantik til at muliggøre højtydende stedgenkendelse fra modsatte synspunkter.
Garg sagde, mens mennesker havde en bemærkelsesværdig evne til at genkende et sted, når de kom tilbage til det fra den modsatte retning, herunder under omstændigheder, hvor der er ekstreme variationer i dens udseende, opgaven havde givet udfordringer for robotter og autonome køretøjer.
"For eksempel, hvis en person kører ned ad en vej, og de svinger en u-sving og går tilbage ad den samme vej, i den modsatte retning, de har evnen til at vide, hvor de er, baseret på den tidligere erfaring, fordi de genkender vigtige aspekter af miljøet. Folk kan også gøre det, hvis de rejser ad den samme vej om natten, og så igen i løbet af dagen, eller i forskellige sæsoner, Sagde hr. Garg.
"Desværre, det er ikke så ligetil for robotter. Nuværende konstruerede løsninger, som dem, der bruges af førerløse biler, i høj grad stole på panoramakameraer eller 360 graders lysregistrering og -afstand (LIDAR) sensing. Selvom dette er effektivt, det er meget forskelligt fra, hvordan mennesker naturligt navigerer.

Kredit:neyro2008 / Alexander Zelnitskiy / 123rf.com / forfattere
Professor Michael Milford sagde, at det system, der blev foreslået af QUT-teamet af forskere, brugte et state-of-the-art semantisk segmenteringsnetværk, kaldet RefineNet, uddannet på Cityscapes Dataset, at danne en Local Semantic Tensor (LoST) beskrivelse af billeder. Dette blev derefter brugt til at udføre stedgenkendelse sammen med yderligere robotic vision -teknikker baseret på kontrol af rumlig layoutskontrol og vægtet tastaturmatchning.
"Vi ville replikere den proces, der blev brugt af mennesker. Visuel semantik fungerer ved ikke bare at fornemme, men at forstå, hvor nøgleobjekter er i miljøet, og dette giver mulighed for større forudsigelighed i de handlinger, der følger, "Sagde professor Milford.
"Vores tilgang gør det muligt for os at matche steder fra modsatrettede synspunkter med lidt fælles visuelt overlap og på tværs af dag-nat-cykler. Vi udvider nu dette arbejde til at håndtere både modsatte synspunkter og laterale synspunkter, der opstår, for eksempel, når et køretøj skifter spor. Dette tilføjer en ekstra sværhedsgrad. "
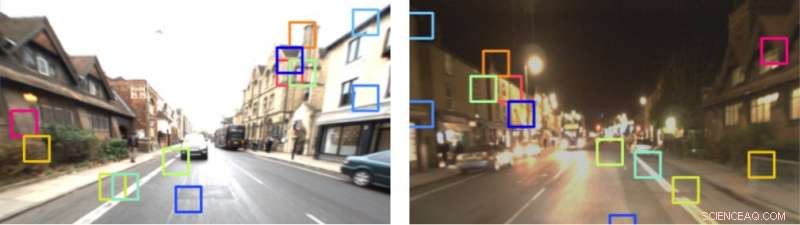
Kredit:1 år, 1000 km:Oxford RobotCar -datasættet
Forskerteamets papir er blevet accepteret til offentliggørelse i Robotik:Videnskab og systemer , den mest selektive internationale robotkonference, som afholdes på Carnegie Mellon University i Pittsburgh denne måned.
 Varme artikler
Varme artikler
-
 Nu ombordstigning:Passagerer klar til verdens længste flyvningEn ny Singapore Airlines-rute, der forbinder bystaten med New York, går i drift den 11. oktober, 2018 bliver den længste kommercielle flyvning i verden Passagerer gjorde sig klar til at gå ombord
Nu ombordstigning:Passagerer klar til verdens længste flyvningEn ny Singapore Airlines-rute, der forbinder bystaten med New York, går i drift den 11. oktober, 2018 bliver den længste kommercielle flyvning i verden Passagerer gjorde sig klar til at gå ombord -
 Google lancerer opdaterede privatlivsværktøjer til YouTube, KortDenne 19. juli, 2016, filbillede viser Google-logoet i virksomhedens hovedkvarter i Mountain View, Californiens medarbejderaktivisme og pres udefra har skubbet store teknologivirksomheder som Amazon,
Google lancerer opdaterede privatlivsværktøjer til YouTube, KortDenne 19. juli, 2016, filbillede viser Google-logoet i virksomhedens hovedkvarter i Mountain View, Californiens medarbejderaktivisme og pres udefra har skubbet store teknologivirksomheder som Amazon, -
 Amazon infiltrerede eBays e-mail-system for at finde topsælgere i global konspiration:RetssagI tre år har Amazon ulovligt infiltreret et internt e-mail-system hos e-handelskonkurrenten eBay, forsøgte at skjule sine spor, da den forsøgte at pochere topsælgere, en ny retssag hævder. Amazons he
Amazon infiltrerede eBays e-mail-system for at finde topsælgere i global konspiration:RetssagI tre år har Amazon ulovligt infiltreret et internt e-mail-system hos e-handelskonkurrenten eBay, forsøgte at skjule sine spor, da den forsøgte at pochere topsælgere, en ny retssag hævder. Amazons he -
 Lige op? DIY koloskopi blandt underlig videnskab på Tokyo -showetSe gør-det-selv-koloskopierøret En gadget til at oversætte hundebark til mennesker, en babypod, der spiller musik inde i moderens skede for ufødte babyer og verdens første selvkolonoskopimetode va
Lige op? DIY koloskopi blandt underlig videnskab på Tokyo -showetSe gør-det-selv-koloskopierøret En gadget til at oversætte hundebark til mennesker, en babypod, der spiller musik inde i moderens skede for ufødte babyer og verdens første selvkolonoskopimetode va
- Forbedret luftkvalitet under den første bølge af COVID forhindrede 150 for tidlige dødsfald i stø…
- Fysikere opdager skjulte aspekter af elektrodynamik
- Videnskabelige eksperimenter på osmose af en kartoffel
- I en tid med robotter, pædagoger skal investere i følelsesmæssigt arbejde
- Fremstilling af polymerstrukturer hurtigere - to processer i en maskine
- Hvorfor synes orkaner at bevæge sig, som om de har et sind af deres o