


Ved hjælp af et dybt indlærende neuralt netværk til at give en bil mulighed for at lære at køre selv på bare 20 minutter
Kredit:Wayve
Et team af forskere ved UK startup Wayve har udviklet en måde at anvende deep learning -netværk på autonom kørsel. I et nylig blogindlæg (sammen med tilhørende YouTube -demonstrationsvideo) beskrev repræsentanter, hvordan deres teknologi fungerer, og tilbyde en demonstration ved hjælp af en rigtig bil på en rigtig vej.
Som teamet på Wayve bemærker, de fleste selvkørende biler bruger et væld af kameraer og sensorer, sammen med kortlægningsværktøjer og en masse computerprogrammering. Men sådan en tilgang, de argumenterer, overser, hvad der synes at være et loft af en slags. Autonome biler programmeret af store virksomheder som Google har nået et punkt, hvor de er gode, men ikke god nok til almindelig brug. Det her, de hævder, skyldes, at sådanne biler endnu ikke er kloge nok til at klare de utallige forhold, der findes på en gennemsnitlig vej. Hvad skal der til, de foreslår, er en smartere computer, ikke flere sensorer eller programmering.
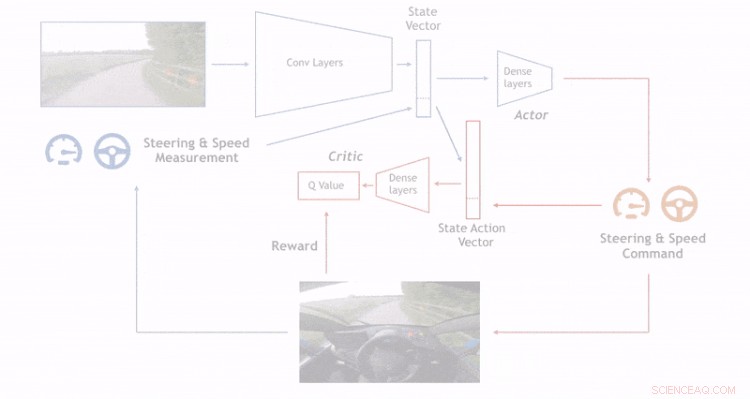
Teamet hos Wayve mener, at en smartere tilgang er at bruge forstærkningsindlæringsalgoritmer som dem, der bruges på projekter som DeepMind - lad computeren lære at gøre noget på samme måde, som folk gør, ved at øve. Forstærkningslæringsalgoritmer er det, der er kernen i dybe læringsnetværk - de lærer ved at gøre, om og om igen, forbedres efterhånden. I tilfælde af autonom køretøjskontrol, det ville betyde at køre bil, indtil de får det rigtigt.
For at demonstrere, hvor godt en sådan tilgang kan fungere, et team på Wayve udstyrede en Renault Twizy med et enkelt kamera og gas, bremse- og styreudstyr og derefter koblet dem til en grafikprocessor og en computer, der kører forstærkningslæringsalgoritmer, som virksomheden har udviklet. Computeren blev "fortalt", at det optimale resultat ville være, at bilen kørte frem ad en vej uden at forlade vejen. Jo længere den kunne gøre dette, des bedre. De tilføjede derefter en menneskelig chauffør og placerede bilen på en landevej. Den menneskelige chauffør ville pege bilen i den rigtige retning og derefter lade computeren overtage. Hvis bilen var tæt på at køre af vejen, mennesket ville stoppe det, få bilen justeret, og giv derefter computeren endnu en gang. På denne måde, computeren kunne lære at forhindre bilen i at køre af vejen på cirka 20 minutter. Efter det, det var i stand til at fortsætte på ubestemt tid.
© 2018 Tech Xplore
 Varme artikler
Varme artikler
-
 Algoritme designer optimerede maskinlæringsmodeller op til 200 gange hurtigere end traditionelle me…MIT-forskere har udviklet en effektiv algoritme, der kunne give en trykknap-løsning til automatisk at designe hurtigtkørende neurale netværk på specifik hardware. Kredit:Chelsea Turner, MIT Et nyt
Algoritme designer optimerede maskinlæringsmodeller op til 200 gange hurtigere end traditionelle me…MIT-forskere har udviklet en effektiv algoritme, der kunne give en trykknap-løsning til automatisk at designe hurtigtkørende neurale netværk på specifik hardware. Kredit:Chelsea Turner, MIT Et nyt -
 Forbedret flydende oxygen-propylen raketmotorpatent afspejler virksomhedens vision i kredsløbsforsø…En raketmotor larmer med to gode nyheder. Reducerede omkostninger. Reduceret kompleksitet. Konceptet, der bærer beskrivelsen af Enhanced Liquid Oxygen-Propylene Rocket Engine har fundet vej til et
Forbedret flydende oxygen-propylen raketmotorpatent afspejler virksomhedens vision i kredsløbsforsø…En raketmotor larmer med to gode nyheder. Reducerede omkostninger. Reduceret kompleksitet. Konceptet, der bærer beskrivelsen af Enhanced Liquid Oxygen-Propylene Rocket Engine har fundet vej til et -
 Skinflow:En blød robotskin baseret på væsketransmissionKredit:Soter et al. Forskere ved Bristol Robotics Laboratory og University of Bristol har for nylig udviklet en ny blød robotisk hudlignende sensor, der er baseret på fluidisk transmission. Denne
Skinflow:En blød robotskin baseret på væsketransmissionKredit:Soter et al. Forskere ved Bristol Robotics Laboratory og University of Bristol har for nylig udviklet en ny blød robotisk hudlignende sensor, der er baseret på fluidisk transmission. Denne -
 Omfattende rapport om private og offentlige Big Data-politikker, der påvirker transportKredit:metamorworks, Shutterstock Forskere har offentliggjort en omfattende rapport om private og offentlige Big Data-politikker, der påvirker transport i EU-lande og i udlandet. Efterhånden som
Omfattende rapport om private og offentlige Big Data-politikker, der påvirker transportKredit:metamorworks, Shutterstock Forskere har offentliggjort en omfattende rapport om private og offentlige Big Data-politikker, der påvirker transport i EU-lande og i udlandet. Efterhånden som
- De første livsformer på Jorden blev afsløret i varme kilder
- Forvent mere dødbringende varme fra klimaændringer, undersøgelse siger
- Topologi af højere orden fundet i 2-D krystal
- Bevarede blade afslører 7000 års nedbør og tørke
- Gåde i tid og rum
- Forskere afdækker grønne skatte - om end rustne - i jorden