


Robotprototype vil lade dig føle, hvordan den føles

Robotprototypen udtrykker sin "vrede" med både øjne og hud, som bliver spidse gennem væskeaktuatorer, der er oppustet under huden, baseret på dens "humør". Kredit:Lindsay France
I 1872, Charles Darwin udgav sit tredje store værk om evolutionsteori, "Udtrykket af følelserne hos mennesker og dyr, " som udforsker de biologiske aspekter af følelseslivet.
I det, Darwin skriver:"Næppe nogen ekspressiv bevægelse er så generel som den ufrivillige erektion af hårene, fjer og andre dermale vedhæng … det er almindeligt i tre af de store hvirveldyrklasser." Næsten 150 år senere, robotteknologien begynder at hente inspiration fra disse ord.
"Aspektet af berøring er ikke blevet udforsket meget i menneske-robot interaktion, men jeg troede ofte, at mennesker og dyr har denne forandring i deres hud, der udtrykker deres indre tilstand, sagde Guy Hoffman, assisterende professor og Mills Family Faculty Fellow i Sibley School of Mechanical and Aerospace Engineering (MAE).
Inspireret af denne idé, Hoffman og studerende i hans Human-Robot Collaboration and Companionship Lab har udviklet en prototype af en robot, der kan udtrykke "følelser" gennem ændringer i dens ydre overflade. Dens hud dækker et gitter af teksturenheder (TU'er), hvis former styres af fluidiske aktuatorer, baseret på et design udviklet i laboratoriet af Hoffmans MAE-kollega Rob Shepherd.
Deres arbejde er beskrevet i et papir, "Blød hudteksturmodulering til sociale robotter, " præsenteret i april på den internationale konference om blød robotteknologi i Livorno, Italien. Doktorand Yuhan Hu var hovedforfatter; avisen blev vist den 16. maj i IEEE Spectrum, en publikation fra Institut for Elektro- og Elektronikingeniører.
Hoffman, hvis TEDx-tale om "Robots with 'soul'" er blevet set næsten 3 millioner gange, sagde inspirationen til at designe en robot, der afgiver nonverbale signaler gennem sin ydre hud, kommer fra dyreverdenen, baseret på ideen om, at robotter ikke skal tænkes i menneskelige termer.
"Jeg har altid følt, at robotter ikke bare skulle være modelleret efter mennesker eller være kopier af mennesker, " sagde han. "Vi har en masse interessante forhold til andre arter. Robotter kunne opfattes som en af de 'andre arter' ' ikke forsøger at kopiere, hvad vi gør, men interagerer med os med deres eget sprog, at bruge vores egne instinkter."
En del af vores forhold til andre arter er vores forståelse af de nonverbale signaler, dyr giver – som at rejse pels på en hunds ryg eller en kats nakke, eller pjusket af en fugls fjer. Det er umiskendelige signaler om, at dyret på en eller anden måde er ophidset eller vredt; det, at de både kan ses og mærkes, styrker budskabet.
"Yuhan udtrykte det meget pænt:Hun sagde, at mennesker er en del af artsfamilien, de er ikke afbrudt, " sagde Hoffman. "Dyr kommunikerer på denne måde, og vi har en følsomhed over for denne form for adfærd."
På samme tid, der udvikles en masse teknologi med aktive materialer, som kan ændre deres form og egenskaber efter behov. Faktisk, en af innovatorerne på det område – Shepherd, leder af Organic Robotics Lab – arbejder tilfældigvis omkring fem Upson Hall-døre væk fra Hoffman.
"Dette er en af de dejlige ting ved at være her på Cornell, " sagde Hoffman. "Rob er lige nede i gangen, og det er sådan jeg opdagede denne teknologi. Denne form for tæt samarbejde er i høj grad det, jeg var så begejstret for at slutte mig til Cornell for."
Hoffman og Hus design har en række af to former, gåsehud og pigge, som kortlægger forskellige følelsesmæssige tilstande. Aktiveringsenhederne til begge former er integreret i teksturmoduler, med væskekamre, der forbinder bump af samme slags.
Holdet prøvede to forskellige aktiveringskontrolsystemer, med minimering af størrelse og støjniveau en drivende faktor i begge designs. "En af udfordringerne, Hoffman sagde, "er, at mange formændrende teknologier er ret højlydte, på grund af de involverede pumper, og disse gør dem også ret omfangsrige."
Hoffman har ikke en specifik applikation til sin robot med teksturskiftende hud, der er kortlagt til dens følelsesmæssige tilstand. På dette tidspunkt, blot at bevise, at dette kan lade sig gøre, er et betydeligt første skridt. "Det giver os bare en anden måde at tænke på, hvordan robotter kunne designes, " han sagde.
Fremtidige udfordringer omfatter skalering af teknologien, så den passer ind i en selvstændig robot – uanset hvilken form robotten tager – og at gøre teknologien mere lydhør over for robottens øjeblikkelige følelsesmæssige ændringer.
"I øjeblikket, de fleste sociale robotter udtrykker [deres] indre tilstand kun ved at bruge ansigtsudtryk og gestus, " konkluderer papiret. "Vi mener, at integrationen af en tekstur-ændrende hud, kombinerer både haptiske [følelse] og visuelle modaliteter, kan således markant forbedre det ekspressive spektrum af robotter til social interaktion."
 Varme artikler
Varme artikler
-
 AI-designede varmepumper bruger mindre energiKredit:Ecole Polytechnique Federale de Lausanne I Schweiz, 50 til 60 procent af nye boliger er udstyret med varmepumper. Disse systemer trækker termisk energi fra det omgivende miljø - såsom fra j
AI-designede varmepumper bruger mindre energiKredit:Ecole Polytechnique Federale de Lausanne I Schweiz, 50 til 60 procent af nye boliger er udstyret med varmepumper. Disse systemer trækker termisk energi fra det omgivende miljø - såsom fra j -
 Blodprøvestart Theranos siges at være ved at lukke (Opdatering)Kredit:CC0 Public Domain Den engang varslede blodprøvestartup Theranos lukker ned, ifølge en medierapport. Theranos var ude af stand til at sælge sig selv og søger nu at betale usikrede kreditore
Blodprøvestart Theranos siges at være ved at lukke (Opdatering)Kredit:CC0 Public Domain Den engang varslede blodprøvestartup Theranos lukker ned, ifølge en medierapport. Theranos var ude af stand til at sælge sig selv og søger nu at betale usikrede kreditore -
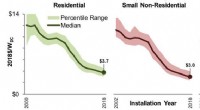 Distribuerede solpriser falder årligt med 5% til 7%Grafer viser installerede pristendenser over tid. Pristendenser er kun baseret på værtsejede systemer. Skraverede områder viser området 20. til 80. percentil. Store ikke -residentielle systemer består
Distribuerede solpriser falder årligt med 5% til 7%Grafer viser installerede pristendenser over tid. Pristendenser er kun baseret på værtsejede systemer. Skraverede områder viser området 20. til 80. percentil. Store ikke -residentielle systemer består -
 Små sensorer kan forhindre jordskælvsskader, spor sonarfare, lytte til rørledningerSmå accelerometre, der bliver skabt i SFU-professor Behraad Bahrenyis Intelligent Sensing Laboratory, er i stand til at fange de mest følsomme seismiske aktiviteter. Kredit:Simon Fraser University
Små sensorer kan forhindre jordskælvsskader, spor sonarfare, lytte til rørledningerSmå accelerometre, der bliver skabt i SFU-professor Behraad Bahrenyis Intelligent Sensing Laboratory, er i stand til at fange de mest følsomme seismiske aktiviteter. Kredit:Simon Fraser University
- Biobaserede nanobærere til at helbrede plantesygdomme for første gang
- Midt i privatlivets ildstorm, Facebook begrænser forskningsværktøj
- Hvilke fire elementer udgør næsten 90% af jorden?
- Ny undersøgelse kræver ensartet forskning for at forstå ændrede økosystemer
- Skiftende lokalsamfund kan påvirke succesen med Icelands retningslinjer for evakuering
- Sådan beregnes omkostning pr. Pund