


Ingeniør lærer humanoide robotter at bruge deres hænder til at forhindre sig selv i at falde
En berømt viral video om DARPA Robotics Challenge viser alle mulige humanoide robotter, der klodset falder ned. Bipedal bevægelse er ret ustabil, hvilket ikke kun er et problem for en robot, der forsøger at fuldføre sin opgave, men også fordi fald kan beskadige et meget dyrt stykke maskineri.
Robotikere over hele kloden tackler dette problem på et utal af måder. Mens nogle ser på at tilføje en række korrigerende trin, efter at en robot er kommet ud af balance, meget som en person, der snubler efter at snuble, Kris Hauser ønsker, at robotter skal kunne bruge miljøet omkring dem.
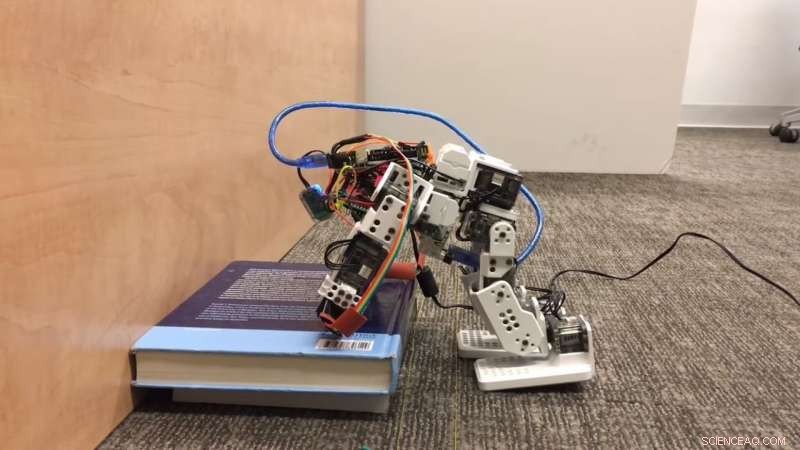
"Hvis en person bliver skubbet mod en væg eller en skinne, de vil være i stand til at bruge den overflade til at holde sig oprejst med deres hænder. Vi ønsker, at robotter skal kunne gøre det samme, " sagde Kris Hauser, lektor i elektro- og computerteknik og i maskinteknik og materialevidenskab ved Duke. "Vi mener, at vi er den eneste forskergruppe, der arbejder på at få en robot til dynamisk at vælge, hvor den skal placere sine hænder for at forhindre at falde."
Selvom sådanne beslutninger og handlinger er anden natur for os, at programmere dem ind i en robots reflekser er vildledende svært. For at strømline processen og spare beregningstid, Hauser programmerer softwaren til kun at fokusere på robottens hofte- og skulderled.
Så længe robotten ikke vrider sig, når den falder, dette skaber kun tre vinkler, som stabiliseringsalgoritmen skal tage højde for - foden til hoften, hoften til skulderen, og skulderen til hånden. Robotten skal identificere nærliggende overflader inden for rækkevidde og derefter hurtigt beregne den bedste kombination af vinkler for at fange sig selv. Den endelige løsning minimerer påvirkningen, når robottens hænder kommer i kontakt, og minimerer også risikoen for, at dens hænder eller fødder glider. Algoritmen tager sit bedste gæt og optimerer det derefter gradvist ved hjælp af en metode kaldet direkte skydning.
I sin nuværende tilstand, robotten får information om sit miljø tilført sig og kan ikke navigere på egen hånd. Men i den nærmeste fremtid, Hauser planlægger at opgradere til en større robot med sine egne kamerasensorer for at lade den se sine omgivelser.
"Forhåbentlig skal vi inden årets udgang lave eksperimenter med robotten, der rent faktisk arbejder i en levende forhindringsbane, " sagde Hauser. "Så vil vi forsøge at få robotten til både dynamisk at kortlægge, hvad der er omkring den og begrunde, hvordan man beskytter sig selv mod at falde i vilkårlige miljøer."
 Varme artikler
Varme artikler
-
 Ny æra i Alibaba, da Jack Ma kører ind i solnedgangenJack Ma vinker farvel til Alibaba efter 20 år ved roret Jack Ma træder til side tirsdag som formand for Alibaba, afslutte et spektakulært vellykket 20-årigt løb, hvor den karismatiske tidligere en
Ny æra i Alibaba, da Jack Ma kører ind i solnedgangenJack Ma vinker farvel til Alibaba efter 20 år ved roret Jack Ma træder til side tirsdag som formand for Alibaba, afslutte et spektakulært vellykket 20-årigt løb, hvor den karismatiske tidligere en -
 Team omdanner vådt biologisk affald til diesel-kompatibelt brændstofMekanisk videnskab og ingeniørstuderende Timothy Lee har en prøve af affald og en prøve af destillat, holdet stammer fra dette affald. Kredit:L. Brian Stauffer I et skridt hen imod at producere ve
Team omdanner vådt biologisk affald til diesel-kompatibelt brændstofMekanisk videnskab og ingeniørstuderende Timothy Lee har en prøve af affald og en prøve af destillat, holdet stammer fra dette affald. Kredit:L. Brian Stauffer I et skridt hen imod at producere ve -
 AI hardware nyheder:Nvidia har dev -kit til tinkerers, mens modul sendes i juniJetson Nano. Kredit:Nvidia At sige, at Nvidia er interesseret i kunstig intelligens, er en underdrivelse. Det er som at sige, at Nvidia finder teknologi interessant. Virksomhedens AI-platform, den
AI hardware nyheder:Nvidia har dev -kit til tinkerers, mens modul sendes i juniJetson Nano. Kredit:Nvidia At sige, at Nvidia er interesseret i kunstig intelligens, er en underdrivelse. Det er som at sige, at Nvidia finder teknologi interessant. Virksomhedens AI-platform, den -
 Ansigtsgenkendelsesforbud:Hvad er det næste i Oakland, hos Amazon og mereKredit:CC0 Public Domain Bestræbelserne på at tøjle regeringens brug af ansigtsgenkendelse har et par store uger forude, dage efter, at San Francisco godkendte et første af sin slags forbud mod br
Ansigtsgenkendelsesforbud:Hvad er det næste i Oakland, hos Amazon og mereKredit:CC0 Public Domain Bestræbelserne på at tøjle regeringens brug af ansigtsgenkendelse har et par store uger forude, dage efter, at San Francisco godkendte et første af sin slags forbud mod br
- Sikkerhed og privatliv overvejes sjældent før køb af IoT-enheder
- Brug af kunstig intelligens til at opdage diskrimination
- Metoderne for opregning i mikrober
- Fluorescerende jungle fitnesscentre lavet af DNA
- Globale kystvådområder skal flytte ind i landet i kampen mod klimaændringer
- Brændstoffer brugt i vores daglige liv