


Udvikler den fysiske struktur af robotter til at forbedre ydeevnen i forskellige miljøer
Ben fastgjort til en af forskernes hexapoder. Kredit:Collins et al.
Forskere ved CSIRO &Queensland University of Technology har for nylig gennemført en undersøgelse, der har til formål automatisk at udvikle robottens fysiske struktur for at forbedre deres ydeevne i forskellige miljøer. Dette projekt, finansieret af CSIRO's Active Integrated Matter Future Science Platform, blev undfanget af David Howard, forsker ved Data61's Robotics and Autonomous Systems Group (RASG).
"RASG fokuserer på feltrobotik, hvilket betyder, at vi har brug for vores robotter til at gå ud til fjerntliggende steder og udføre missioner i ugunstige situationer, vanskelige miljøforhold, " David Howard fortalte TechXplore. "Undersøgelsen kom i stand gennem en identificeret mulighed, da RASG gør omfattende brug af 3D-print til at bygge og tilpasse vores robotter. Denne forskning demonstrerer en designalgoritme, der automatisk kan generere 3D-printbare komponenter, så vores robotter er bedre rustet til at fungere i forskellige miljøer."
Undersøgelsens hovedformål var at generere komponenter automatisk, der kan forbedre en robots miljøspecifikke ydeevne, med minimale begrænsninger på, hvordan disse komponenter ser ud. Forskerne fokuserede især på benene på en hexapod (6-benet) robot, som kan implementeres i en række forskellige miljøer, herunder industrielle omgivelser, regnskove, og strande.
"Benene kan let konverteres til 3D-printbare filer, så vi let kan udskrive benene og klippe dem på vores hexapoder til implementering, "Howard sagde." Vi antog, at ændring af benformen ville give os forskellige præstationer, og papiret beskriver en tidlig demonstration af denne evne. Vi tog inspiration fra den mest magtfulde kreative kraft på planeten, en, der igen og igen skaber former, der fungerer under nogle gange meget vanskelige miljøforhold:evolution."
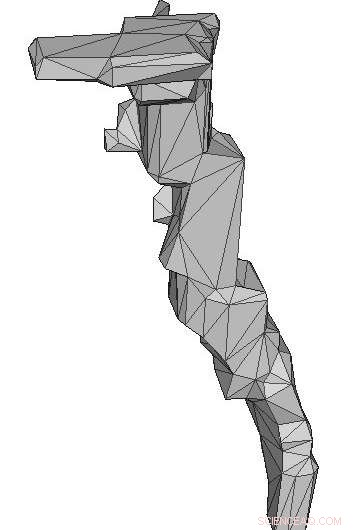
Et ben optimeret til hårde jordoverflader. Kredit:Collins et al.
Systemet udviklet af Howard og hans kolleger bruger en genetisk algoritme til at optimere samlinger af Bezier-splines (3-D-versioner af 'curve' -værktøjet på Microsoft Paint), definere formen på robottens skinneben. Kandidatbendesign er optimeret baseret på, hvor egnet de er til et bestemt miljø. I deres undersøgelse, denne optimering var baseret på en funktion af den energi, der kræves for at gå gennem et miljø, og den mængde materiale, der kræves for at skabe benet.
"Vi starter med en population af tilfældige ben, vurdere dem i et high-fidelity simuleret miljø (grus, hård jord og vand var dem, vi fokuserede på) og få deres fitnessresultater, "Howard forklarede." Disse scoringer bruges til at implementere en 'survival of the fittest' udvælgelsesproces, så gode ben bevares og dårlige ben 'dræbes'. De gode ben får så en chance for at formere sig, ved hjælp af analoger til crossover, hvor et barn ben har træk af to forældreben, og gennem mutation, hvor funktionerne i figurerne er tilfældigt ændret. "
Denne tilgang gør det muligt for algoritmen at søge efter gode former, der kan anvendes på robotens ben, inden for et rum med mulige løsninger. Forskerne genererede en række børneben og fik dem derefter til at 'konkurrere' med forældreben for at afgøre, hvilken der ville blive inkluderet i næste generationsrunde. Formen på robotens ben blev automatisk optimeret over tid, efter hundredvis af sådanne generationer.
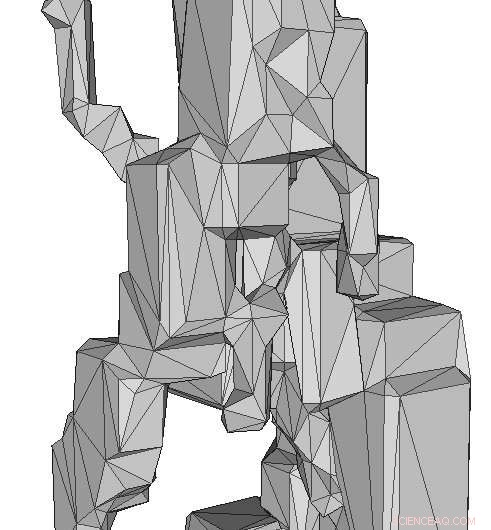
Et ben optimeret til grusoverflader. Kredit:Collins et al.
"Vi var i stand til at vise miljøspecialisering i populationerne af ben, " sagde Howard. "De udviklede sig automatisk, så for eksempel, større fodaftryk blev konsekvent set i ben udviklet til at gå i grus, da dette forhindrer benet i at glide ned i gruset og enten sætter sig fast, eller bruge for meget energi på at fjerne benet. I hård jord, på den anden side, benene blev tyndere, da der ikke var nogen straf for at have et mindre fodaftryk. "
Forskerne fandt ud af, at de producerede ben faktisk var 'nichede', ' i en evolutionær forstand. Med andre ord, formen på benene varierede meget, da de havde udviklet sig til at fungere bedst i forskellige miljøer.
-
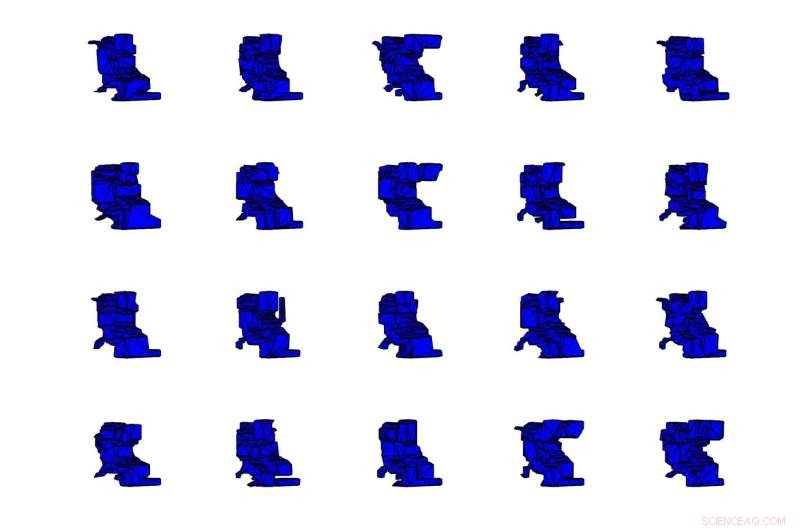
Billedet viser, hvad der sker, når vi muterer et ben -bemærk, at de alle er lidt forskellige. Dette er på grund af den 'genetiske' mutation, vi gør på Bezier -kurverne. Nogle af disse variationer vil være gavnlige, og nogle vil være skadelige, fordi vi udvælger baseret på fitness, vil de mere gavnlige mutationer sandsynligvis blive bevaret. Kredit:Collins et al.
-
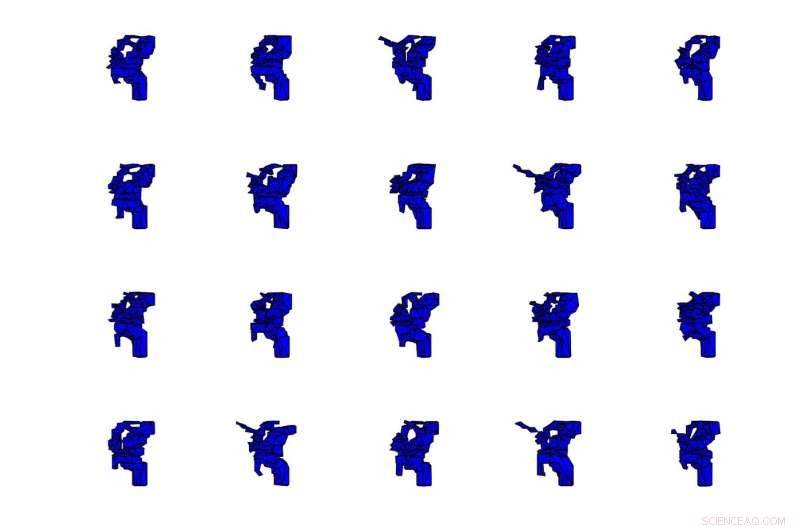
Billedet viser, hvad der sker, når vi muterer et ben -bemærk at de alle er lidt forskellige. Dette er på grund af den 'genetiske' mutation, vi gør på Bezier -kurverne. Nogle af disse variationer vil være gavnlige og nogle vil være skadelige, fordi vi udvælger baseret på fitness, vil de mere gavnlige mutationer sandsynligvis blive bevaret. Kredit:Collins et al.
"Præstationsmæssigt, også, et optimalt ben for et miljø var ikke så optimalt i andre miljøer, "Howard sagde." Dette er vigtigt, fordi det viser, at vores algoritme skaber miljøspecifikke former. "
Undersøgelsen udført af Howard og hans kolleger kan være et vigtigt første skridt mod udviklingen af robotter, der er bedst rustet til at operere i forskellige miljømæssige omgivelser. Indtil nu, de har kun evalueret genererede ben i simuleringer. Før de kan indsættes, derfor, forskerne bliver nødt til at teste deres designs i den virkelige verden og bevise, at de klarer sig bedre end konventionelle ben.

Ben fastgjort til en af forskernes hexapoder. Kredit:Collins et al.
"Vi vil også overveje at bruge evolution til at vælge forskellige materialetyper i benene, "Howard sagde." Vi kan bruge 3D-print i flere materialer til at skabe ben fremstillet af forskellige typer materialer, som vi forventer vil yderligere forbedre benenes evne til at fungere godt i forskellige miljøer. Vi er også begyndt at bruge mere komplekse repræsentationer til benformerne, I dette tilfælde, neurale netværk kaldet sammensætningsmønsterproducerende netværk, som kan specificere formen og materialeegenskaberne af benene uden at være begrænset til Bezier-lignende geometrier."
© 2018 Tech Xplore
 Varme artikler
Varme artikler
-
 Brexit mareridt:Videospil viser en grum vision om livet efter EUEndgame:Det nye videospil Not Tonight ligger i et dystopisk Storbritannien efter Brexit Set i et dystopisk Storbritannien efter Brexit, et nyt videospil følger kampen med en udsmider af udenlandsk
Brexit mareridt:Videospil viser en grum vision om livet efter EUEndgame:Det nye videospil Not Tonight ligger i et dystopisk Storbritannien efter Brexit Set i et dystopisk Storbritannien efter Brexit, et nyt videospil følger kampen med en udsmider af udenlandsk -
 Social engineering driver cyberkriminalitet mod virksomhederI denne 27. aug. 2019 foto, Tyler Olson poserer på sit kontor på University of St. Thomas - Minneapolis campus. Olson er lige ved at starte et cybersikkerhedsfirma. (AP Photo/Jim Mone) Den cyberkr
Social engineering driver cyberkriminalitet mod virksomhederI denne 27. aug. 2019 foto, Tyler Olson poserer på sit kontor på University of St. Thomas - Minneapolis campus. Olson er lige ved at starte et cybersikkerhedsfirma. (AP Photo/Jim Mone) Den cyberkr -
 Amerikansk dommer afviser Kaspersky-sag mod regeringens forbud mod dets produkterEugene Kaspersky, administrerende direktør for Kaspersky Lab, afviser bånd til den russiske regering En dommer i Washington afviste onsdag et søgsmål fra det russiske computersikkerhedsfirma Kaspe
Amerikansk dommer afviser Kaspersky-sag mod regeringens forbud mod dets produkterEugene Kaspersky, administrerende direktør for Kaspersky Lab, afviser bånd til den russiske regering En dommer i Washington afviste onsdag et søgsmål fra det russiske computersikkerhedsfirma Kaspe -
 Forskere vender, hvordan elektriske signaler flytter væskedråberStillet fra en video, der viser elektrobefugtning. Kredit:University of California, Los Angeles Når medicinske laboratorier analyserer blodprøver for tegn på sygdom, de bruger nogle gange instrume
Forskere vender, hvordan elektriske signaler flytter væskedråberStillet fra en video, der viser elektrobefugtning. Kredit:University of California, Los Angeles Når medicinske laboratorier analyserer blodprøver for tegn på sygdom, de bruger nogle gange instrume
- Sådan konverteres cSt til SUS
- Den kraftige cyklon Nisarga går i land nær Mumbai
- Et utroligt bredt udvalg af planetdannende diske
- Mest førskole matematik, alfabetiseringsapps, der ikke er designet til at hjælpe børn med at lær…
- Volden i det præcolumbianske Panama overdrevet, viser ny undersøgelse
- Onlinekurser forstærker uligheder