


Bysværme til autonom affaldshåndtering
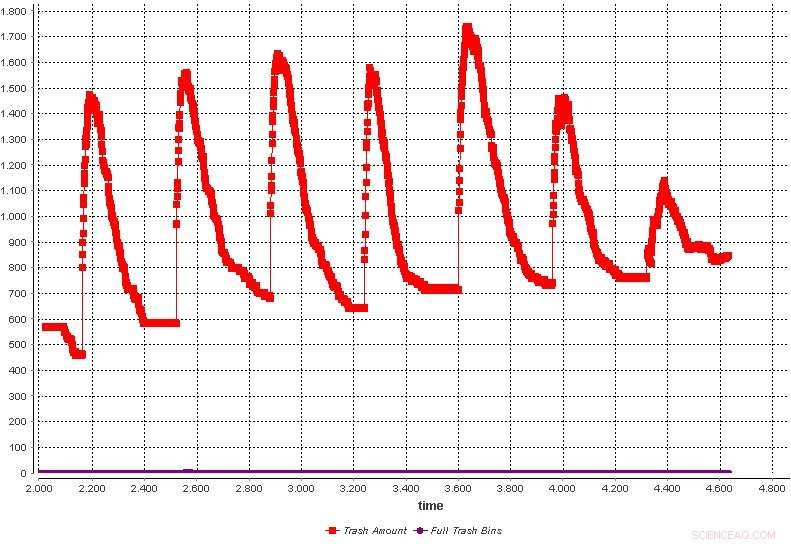
Billede, der viser, hvor hurtigt deponering af nyt affald i bymiljøet bortskaffes. Kredit:Alfeo et al.
Forskere på MIT Media Lab, universitetet i Pisa, og Université Libre de Bruxelles har for nylig undersøgt muligheden for at bruge sværmsrobotsystemer til autonom affaldshåndtering. Deres tilgang, skitseret i et papir, der på forhånd blev offentliggjort på arXiv, anvender bioinspirerede fourageringsmetoder til sværmrobotik, med det formål at forbedre effektiviteten og autonomien i affaldshåndtering i byer.
"Med autonome køretøjer, sværme af droner til leverancer og teams af robotter, der organiserer lagre, fremtidens by vil være et cybernetisk økosystem bestående af maskiner og mennesker, "Antonio Luca Alfeo, en af forskerne, der gennemførte undersøgelsen, fortalte Tech Xplore. "Dette er et fascinerende scenario, samt en kæmpe teknologisk udfordring. Håndteringen af sådanne systemer resulterer i en kompleksitet, der vokser eksponentielt, efterhånden som flere maskiner indsættes, især hvis vi vil have dem til faktisk at 'leve med os' og reagere autonomt på de skiftende behov i deres omgivende miljø. "
Naturen giver flere eksempler på, hvordan lignende sameksistensproblemer kan løses glimrende og effektivt. I deres undersøgelse, forskerne forsøgte at anvende disse naturinspirerede løsninger til håndtering af robotsværme.
"Vi foreslår et affaldsbortskaffelsessystem med sværme af robotter, hvis selvorganisering er baseret på adfærden fra sociale insekter, også kendt som stigmergy-baseret fouragering, "Alfeo forklaret." Det foreslåede system omhandler bortskaffelse af affald, fra skraldespande til et par centrale aflejringer. "
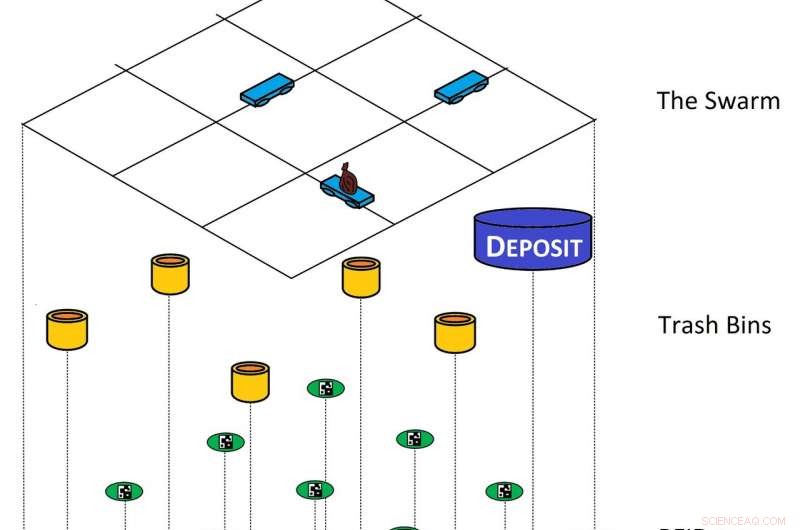
"Virtuelle feromoner" frigivet af andre robotter på RFID -tags i bymiljøet. Kredit:Alfeo et al.
De robotter, der er udviklet af Alfeo og hans kolleger, kontrolleres ikke og får vejledning af en fjerntjeneste. I stedet, alle deres beslutninger træffes i øjeblikket, baseret på deres opfattelser og observationer i realtid.
"Blandt disse opfattelser er der er også 'virtuelle feromoner' frigivet af andre robotter på RFID -tags i bymiljøet, "Sagde Alfeo." Disse markerer den mest bekvemme vej fra en eller flere ikke-tomme skraldespande og det nærmeste depositum. Mest vigtigt, takket være dens kollektive adfærd, sværmen er i stand til selvstændigt at organisere sig selv for at målrette de områder med den største mængde affald, altid giver et effektivt svar. "
Designet af denne innovative løsning krævede en lang række færdigheder og dækkede forskellige ekspertiseområder. Teamet, der udviklede det, er derfor meget tværfagligt, med baggrunde inden for byvidenskab, bioinspireret robotik, og datavidenskab.
"Teammedlemmer specialiseret i byvidenskab gav modellen af robotten, der blev brugt i undersøgelsen, og beskæftigede sig med modellering af byrum i GAMA, en multi-agent simuleringsplatform, "Alfeo sagde." De dygtige i adfærdsmæssigt design af sværm af robotter indså og testede sværmens logik i en korrekt udvidet model af bymiljøet. Endelig, analysen af konsekvenserne af hvert designvalg blev overvåget af yderst dygtige dataforskere. "
Alfeo og hans kolleger evaluerede deres sværmsystem til affaldshåndtering og fandt ud af, at det overgik de eksisterende tilgange. Deres undersøgelse gav også værdifuld indsigt i, hvordan man bedst designer og tilpasser sværmsrobotsystemer.
"Vi viste, at en sværm af selvorganiserede robotter kunne føre til store forbedringer i forbindelse med affaldshåndtering, uden nogen ekstern informationskilde eller forudgående viden om efterspørgslen efter affald, "Sagde Alfeo." Desuden, vi gav indsigt i designet af et sådant system med det formål at afbalancere dets to hovedegenskaber, det er, sværmens udforskende evne og lydhørhed. Den første kan reducere forekomsten af fulde skraldespande, mens sidstnævnte hjælper med at reducere mængden af skrald i bymiljøet. "
Undersøgelsen foretaget af Alfeo og hans kolleger er et fascinerende og nyttigt eksempel på, hvordan sværmrobotsystemer kan anvendes i bymiljøer. Deres resultater er meget lovende, åbner nye interessante muligheder, der kunne undersøges nærmere i fremtiden.
"Den foreslåede tilgang er ikke specifik for affaldshåndtering, og den kan testes i en række forskellige applikationer, såsom autonome køretøjer, "Sagde Alfeo." Da sikkerhed i dette tilfælde er en kritisk faktor, imidlertid, udformningen af et sådant system bør omfatte yderligere specifikke løsninger, såsom blokkædeteknologi. "
© 2018 Science X Network
Sidste artikelMaskiner, der lærer sprog mere som børn gør
Næste artikelSpotify -indtjeningen ramte sur note på Wall Street
 Varme artikler
Varme artikler
-
 Carlos Ghosn genanholdt på grund af nye beskyldningerRutsjebanesagaen om Carlos Ghosn har grebet Japan Japanske anklagere anholdt den tidligere Nissan-chef Carlos Ghosn på grund af nye beskyldninger i fredags. tilsyneladende ødelægger hans håb om ti
Carlos Ghosn genanholdt på grund af nye beskyldningerRutsjebanesagaen om Carlos Ghosn har grebet Japan Japanske anklagere anholdt den tidligere Nissan-chef Carlos Ghosn på grund af nye beskyldninger i fredags. tilsyneladende ødelægger hans håb om ti -
 Facebook lukker hundredvis af uægte Rusland-linkede siderFacebook er kommet under intenst pres fra en bølge af skandaler, hovedsageligt over deling af sine brugeres data uden deres samtykke, men også over voldsomme russiske falske nyheder-påvirkningskampagn
Facebook lukker hundredvis af uægte Rusland-linkede siderFacebook er kommet under intenst pres fra en bølge af skandaler, hovedsageligt over deling af sine brugeres data uden deres samtykke, men også over voldsomme russiske falske nyheder-påvirkningskampagn -
 I en første, elbiler sælger mere end traditionelle biler i NorgeI denne 26. nov. 2014 filbillede elbiler står i kø i busbanen, venstre, på hovedvejen ind til Oslo, Norge. I en symbolsk første Elbiler solgte mere end fossilt brændstofdrevne biler i Norge i marts 20
I en første, elbiler sælger mere end traditionelle biler i NorgeI denne 26. nov. 2014 filbillede elbiler står i kø i busbanen, venstre, på hovedvejen ind til Oslo, Norge. I en symbolsk første Elbiler solgte mere end fossilt brændstofdrevne biler i Norge i marts 20 -
 Spiladfærd kan give et hint om spillerens kønKredit:CC0 Public Domain Forskere fra ITMO University rapporterer, at de har forudsagt personlighedstræk såsom køn ved hjælp af data fra en online spilleplatform. Dette er en af de første unders
Spiladfærd kan give et hint om spillerens kønKredit:CC0 Public Domain Forskere fra ITMO University rapporterer, at de har forudsagt personlighedstræk såsom køn ved hjælp af data fra en online spilleplatform. Dette er en af de første unders