


Følelse af pres med universel taktil billeddannelse
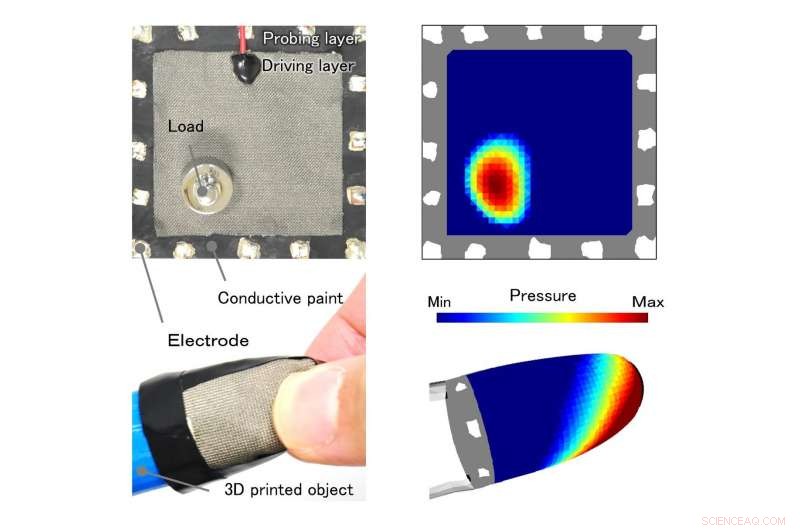
Fig. 1. Taktil billeddannelse ved hjælp af universelle ledere. Kredit:Osaka University
Røre ved, eller taktil sansning, er grundlæggende vigtig for en række anvendelser i det virkelige liv, fra robotik til kirurgisk medicin til sportsvidenskab. Taktile sensorer er modelleret efter den biologiske berøringssans og kan hjælpe forskere med at forstå menneskelig opfattelse og bevægelse. Forskere fra Osaka University har nu udviklet en ny tilgang til måling af trykfordeling ved hjælp af taktil billeddannelsesteknologi.
Tryk er en af de primære egenskaber ved berøring, og taktil billeddannelse kan bruges til at måle tryk- eller stressfordelinger over et objekt af interesse. Den mest almindelige nuværende tilgang til taktil billeddannelse involverer brug af en række sensorer, der består af trykfølsomme materialer. Imidlertid, sådanne arrays kræver komplekse fremstillingsprocesser og sætter begrænsninger for sensordesignet, derfor nødvendigheden af en ny metode, nu skitseret i en artikel i IEEE -transaktioner på industriel elektronik .
"Trykket mellem to ledere er direkte relateret til den elektriske kontaktmodstand mellem dem, "siger Osaka University's Osamu Oshiro." Vi brugte dette forhold til at udvikle en sensor sammensat af et par elektromekanisk koblede ledere, hvor den ene leder havde en drivende funktion og den anden udførte sondefunktionen. Denne sensor har ikke behov for trykfølsomme materialer og er lettere at fremstille. "
Denne strategi muliggjorde udvikling af en universel taktil sensor til måling af kontakttrykfordeling ved hjælp af enkle ledende materialer som kulmaling. Designkonceptet kombinerede innovation inden for mekatronik -teknologi, som muliggjorde udvikling af en fleksibel sensor baseret på konventionelle ledere forbundet til elektroder, med en tomografibaseret tilgang til bestemmelse af trykfordelingen på tværs af de koblede ledere.
Den foreslåede metode forbedrede tidligere elektriske impedans tomografi-baserede taktile sensing teknikker for at give sensorer høj positionel nøjagtighed, justerbar følsomhed og rækkevidde, og en forholdsvis enkel fremstillingsproces. "Sensorerne kan realiseres ved hjælp af forskellige ledende materialer, herunder ledende stoffer og maling, "siger hovedforfatter Shunsuke Yoshimoto." Fleksible sensorer af arketype blev fremstillet, sammen med fingerformede sensorer produceret ved at belægge 3D-trykte strukturer med ledende maling, for at illustrere mulige praktiske anvendelser. "
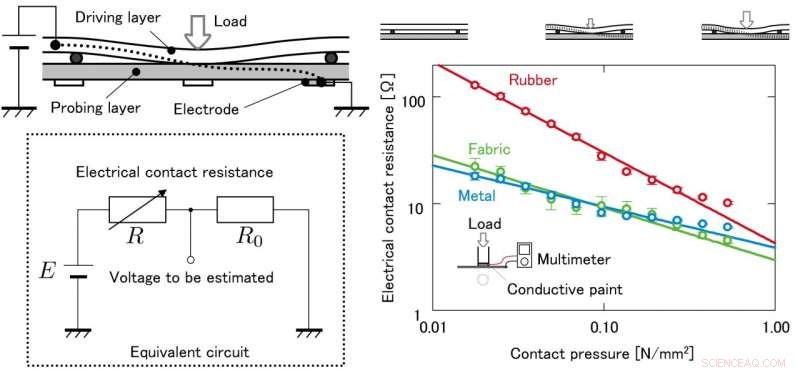
Fig. 2. Sensorprincip og illustration af forholdet mellem den elektriske kontaktmodstand og kontakttrykket. Kredit:Osaka University
Den lette justering af følsomheds- og sanseområdet og trykestimeringspræcisionen betyder, at denne taktile billeddannelsesmetode forventes at muliggøre avanceret kontrol af flerbrugerobotter. "Disse sensorer forventes at være anvendelige på områder, herunder fjernbetjening af enheder og industriel automatisering, "fastslår medforfatter Yoshihiro Kuroda.
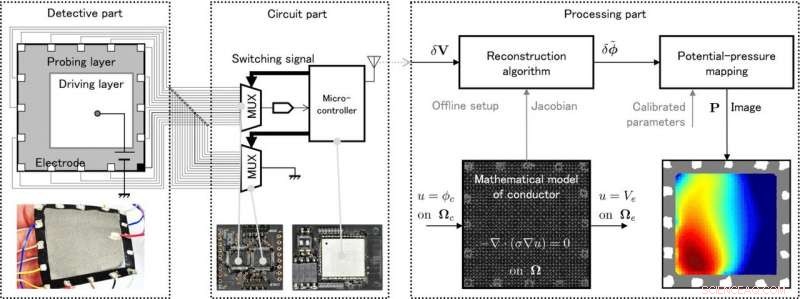
Fig. 3. Oversigt over hovedsektionerne i detektionssystemet. Kredit:Osaka University
 Varme artikler
Varme artikler
-
 Lyft tilbyder elbiler til ryttere, chaufførerKredit:CC0 Public Domain Lyft-passagerer vil snart kunne anmode om en tur i et el- eller hybridkøretøj, når de planlægger en rejse. Ridefirmaet lancerer funktionen først i Seattle og derefter i a
Lyft tilbyder elbiler til ryttere, chaufførerKredit:CC0 Public Domain Lyft-passagerer vil snart kunne anmode om en tur i et el- eller hybridkøretøj, når de planlægger en rejse. Ridefirmaet lancerer funktionen først i Seattle og derefter i a -
 Brint blæser op:Fra videnskabeligt eksperiment til eksportindustriKredit:Darren Halstead på Unsplash Kan du huske de videnskabelige eksperimentbiler drevet af vand? Den teknologi kan hjælpe Australien med at dekarbonisere sin økonomi og blive en vigtig aktør i e
Brint blæser op:Fra videnskabeligt eksperiment til eksportindustriKredit:Darren Halstead på Unsplash Kan du huske de videnskabelige eksperimentbiler drevet af vand? Den teknologi kan hjælpe Australien med at dekarbonisere sin økonomi og blive en vigtig aktør i e -
 Google indrømmer, at deres ansigtsscanningsprojekt for mørk hud overtrådte intern politik, fører…Kredit:CC0 Public Domain Google arbejder på at redde ansigt. Teknologigiganten indrømmede, at den foretager ændringer, efter at en New York Daily News-undersøgelse fandt, at dets ansigtsgenkendel
Google indrømmer, at deres ansigtsscanningsprojekt for mørk hud overtrådte intern politik, fører…Kredit:CC0 Public Domain Google arbejder på at redde ansigt. Teknologigiganten indrømmede, at den foretager ændringer, efter at en New York Daily News-undersøgelse fandt, at dets ansigtsgenkendel -
 Honda nettoresultat i første halvår falder med 19%, helårsprognose nedFor perioden april-september, Honda havde et nettoresultat på 368,85 milliarder yen, ned 19 procent fra et år tidligere Den japanske bilproducent Honda sagde fredag, at nettoresultatet i første ha
Honda nettoresultat i første halvår falder med 19%, helårsprognose nedFor perioden april-september, Honda havde et nettoresultat på 368,85 milliarder yen, ned 19 procent fra et år tidligere Den japanske bilproducent Honda sagde fredag, at nettoresultatet i første ha
- En vejledning til små virksomheder, der navigerer i skyen
- Sådan læses Transistor Data
- Canada, Apples udvikling af kulfri aluminiumssmeltningsteknologi tilbage
- Ekstreme rumvejr-inducerede blackouts kan koste USA mere end 40 milliarder dollar dagligt
- Flyvekontrol for førerløse biler kan fremskynde indsættelsen
- NASA går privat for 1. astronaut månelandere i årtier