


RoboTurk:En crowdsourcing -platform til efterligningslæring inden for robotik
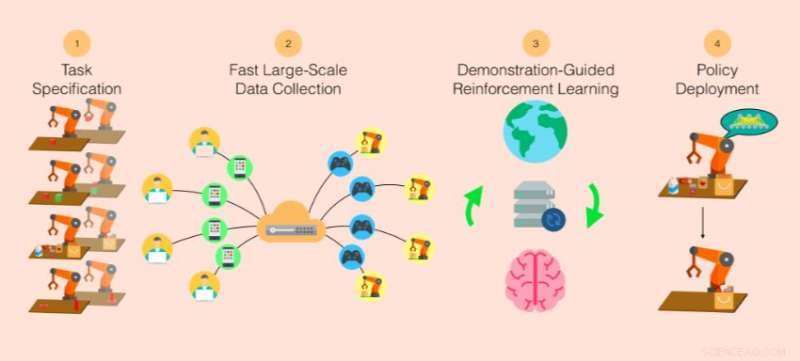
Systemoversigt over ROBOTURK. ROBOTURK muliggør hurtig imitation guidet færdighedsindlæring. Dette system består af følgende store trin:1) angivelse af en opgave, 2) indsamling af et stort sæt opgave demonstrationer ved hjælp af ROBOTURK, 3) brug af demonstrationsforstærket forstærkningslæring til at lære en politik, og 4) implementering af den indlærte færdighed inden for interesseområdet. Kredit:Mandlekar et al.
Imiteret læring er en gren af maskinlæring, der træner maskiner til at efterligne menneskelig adfærd, mens de udfører bestemte opgaver. Disse teknikker viser et stort løfte inden for robotik, da de tackler nogle af manglerne ved forstærkningslæring, såsom efterforskning og belønningsspecifikation.
På trods af opmuntrende resultater, imitation læringsstudier har hidtil været begrænset til beskedne datasæt på grund af vanskeligheder med at indsamle store mængder opgave demonstrationer ved hjælp af eksisterende metoder. For at imødegå disse begrænsninger, et team af forskere under opsyn af Dr. Silvio Savarese og Dr. Fei-Fei Li ved Stanford University har udviklet RoboTurk, en crowdsourcing-platform til højkvalitets 6-DoF-bane-baseret teleoperation ved hjælp af vidt tilgængelige smartphone-enheder.
"Vi ville skabe noget som ImageNet for Robotics, "Ajay Mandlekar, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore. "Vi mener, at data er en vigtig begrænsning inden for robotindlæring. Selvom der er masser af metoder, der lærer af data, såsom datadrevet kontrol og forstærkningslæring, de fleste metoder indsamler deres egne data. Som resultat, dataene er ofte af lav kvalitet, for eksempel resulterer i, at robotten bevæger armen tilfældigt. Denne type udforskning kan være vanskelig og usikker, men vi tror på, at mennesker kan hjælpe. "
ImageNet er en berømt billeddatabase oprettet af Dr. Li, almindeligt anvendt i computer vision og objektgenkendelse forskning. Crowdsourcing -platformen udviklet af Stanford Vision and Learning Lab var designet til at tjene som en lignende ressource for robotteknologi og imitation af læringsstudier.
"I modsætning til ImageNet, et sådant dataindsamlingssystem skulle være dynamisk, giver os mulighed for at indsamle data gentagne gange, ofte på forespørgsel, og måske endda bruge kollaborativ læring, "Yuke Zhu, som også var involveret i udviklingen af Roboturk, fortalte TechXplore. "Dette skyldes, at de data, der indsamles, afhænger af, hvilke typer handlinger robotten foretager i miljøet."
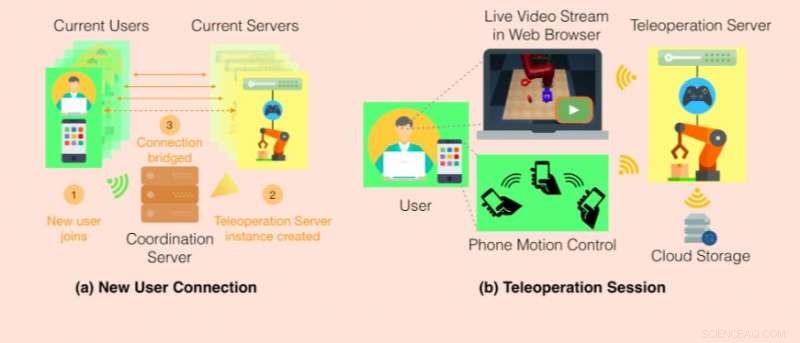
Systemdiagram over ROBOTURK. En ny bruger opretter forbindelse til et websted for at slutte sig til systemet, og en koordinationsserver lancerer en dedikeret teleoperationsserver til brugeren, som vist i (a). Koordinationsserveren etablerer derefter direkte kommunikationskanaler mellem brugerens webbrowser og iPhone og teleoperationsserveren for at starte teleoperationssessionen. Brugeren styrer den simulerede robot ved at flytte sin telefon, og modtager en videostream som feedback i deres webbrowser, som vist i (b). Efter hver vellykket demonstration, teleoperationsserveren skubber de indsamlede data til et cloud -lagersystem. Kredit:Mandlekar et al.
Forskernes ultimative mål er at træne robotter i avancerede manipulationsevner, giver dem mulighed for at udføre opgaver inden for industrielle omgivelser såsom emballage eller samling. De fandt ud af, at imitation af læring viste et stort potentiale i denne sammenhæng, eksisterende datasæt var meget begrænsede på grund af vanskeligheder med at indsamle store mængder opgave demonstrationer.
"I andre domæner, f.eks. Computersyn og behandling af naturligt sprog, overvågning af datasæt i stor skala indsamles ofte ved hjælp af crowdsourcing, "Mandlekar sagde." Dette muliggør en skalerbar mekanisme til forskelligartet menneskeligt tilsyn på et omfattende sæt problemforekomster. Imidlertid, indsamling af store datamængder har været en udfordring for robotopgaver, da de kræver interaktion i realtid og feedback fra annotatorer, lægger vanskelige begrænsninger på fjerntliggende teleoperationsplatforme. "
Gruppen på Stanford Vision and Learning Lab udviklede derfor RoboTurk, en crowdsourcing -platform, der gør det muligt for forskere at skalere de færdigheder og opgaver, som robotter kan udføre autonomt, ved brug af skalerbar menneskelig overvågning. Via RoboTurk, fjernarbejdere kan logge ind på et websted og indsamle opgave demonstrationer, ved hjælp af deres smartphone som en bevægelseskontroller.
"RoboTurk understøttes af en skybaseret simulation-backend, der streamer video til en klients webbrowser ved hjælp af kommunikationsprotokoller med lav latens, "Forklarede Mandlekar." Dette sikrer en ensartet servicekvalitet uanset en klients computerressourcer, resulterer i en platform, der er intuitiv at bruge og har en lav adgangsbarriere, som er kernekravene til en crowdsourced opgave. RoboTurk understøtter flere robotter, opgaver, og simulatorer, og kan let udvides til at støtte andre. "
Forskerne evaluerede deres platform på tre manipulationsopgaver af varierende varighed, fra 15 til 120 sekunder. De fandt ud af, at RoboTurk delte statistiske ligheder med speciel hardware, såsom virtual reality -controllere. De observerede også, at dårlige netværksforhold ikke i væsentlig grad påvirker brugernes evne til at udføre opgaver med succes på platformen. Brug af RoboTurk, de indsamlede 137,5 timers manipulationsdata fra fjernarbejdere, med over 2200 vellykkede opgave demonstrationer i 22 timers samlet systembrug.
Kredit:Mandlekar et al.
"Jeg tror, at den mest meningsfulde del af platformen er, hvordan den vil sætte mennesker og robotter i stand til at interagere, "Animesh Garg, postdoc -studerende, der leder projektet, fortalte TechXplore. "Robotter er fremtidens smarte værktøjer. Vi skal ikke tænke på dem som en erstatning for mennesker, men snarere som en måde at udvide vores muligheder. Dette giver mennesker mulighed for at være mere produktive og fokusere på intelligensproblemer på højere niveau, på samme måde som fremkomsten af computere gjorde det lettere for folk at bruge matematik som et værktøj til at løse interesseproblemer. "
RoboTurk muliggør effektivt politikindlæring om manipuleringsopgaver i flere trin med sparsomme belønninger. Ud over, Mandlekar og hans kolleger fandt ud af, at brug af større mængder demonstrationer under politisk læring havde bemærkelsesværdige fordele, hvilket fører til bedre præstationer og større læringskonsistens.
I fremtiden, RoboTurk kan blive en vigtig ressource inden for robotik, hjælpe udviklingen af mere avancerede og bedre resultater robotter. Forskerne anvender nu RoboTurk på rigtige robotter, samtidig med at de udvikler algoritmer, der kan bruge de indsamlede data til at lære robotter færdigheder på lavt niveau.
"Robotter er en meget spændende teknologi, der gør det muligt for mennesker at være mere produktive og uafhængige på alle områder af menneskelig aktivitet, for eksempel at give en hjælpende hånd i køkkenet, viceværter for den ældre befolkning, og bedre pleje af patienter, "Sagde Garg." En af de ting, der begejstrer os, er demokratisering af fremstilling. Denne teknologi kunne sætte folk i stand til at fremstille og sælge tilpassede produkter uden behov for specialudstyr, ligesom YouTube har demokratiseret oprettelse og distribution af indhold, tillader alle at oprette og dele videoer. "
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 Atlas er en rockstjerne cross-stepper over vanskeligt terrænRobotentusiaster udsendte jubel i denne måned til holdet, der avancerede Atlas til en endnu mere menneskelignende rollator gennem forhindringer, herunder en flok askeblokke og en balancestråle. De har
Atlas er en rockstjerne cross-stepper over vanskeligt terrænRobotentusiaster udsendte jubel i denne måned til holdet, der avancerede Atlas til en endnu mere menneskelignende rollator gennem forhindringer, herunder en flok askeblokke og en balancestråle. De har -
 Alle fingerrobotter vil have til jul er en hånd som DactylKredit:openai Et brev, flerfarvet blok:En triviel opgave venter på mennesker for at hente den, vend det om, kaste det rundt i vores håndflade. For en robotekspert, selvom, dette er en opgave, der
Alle fingerrobotter vil have til jul er en hånd som DactylKredit:openai Et brev, flerfarvet blok:En triviel opgave venter på mennesker for at hente den, vend det om, kaste det rundt i vores håndflade. For en robotekspert, selvom, dette er en opgave, der -
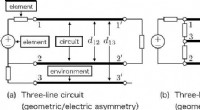 Belysning af årsagen til elektromagnetisk støj giver mulighed for EM-støjfrie elektriske kredslø…Figur 1. Tre-line kredsløbskonfigurationer brugt i denne undersøgelse, som betragter miljøet omkring det elektriske kredsløb (a) Geometrisk asymmetrisk struktur / elektrisk asymmetrisk forbindelse (b)
Belysning af årsagen til elektromagnetisk støj giver mulighed for EM-støjfrie elektriske kredslø…Figur 1. Tre-line kredsløbskonfigurationer brugt i denne undersøgelse, som betragter miljøet omkring det elektriske kredsløb (a) Geometrisk asymmetrisk struktur / elektrisk asymmetrisk forbindelse (b) -
 Forskere fremmer organ-på-chip-teknologi for at fremme udviklingen af lægemidlerEt 3D-selvrullet biosensorarray, der griber en 3D-hjertesfæroid. Kredit:Carnegie Mellon University Forskere fra Carnegie Mellon University (CMU) og Nanyang Technological University, Singapore (NTU
Forskere fremmer organ-på-chip-teknologi for at fremme udviklingen af lægemidlerEt 3D-selvrullet biosensorarray, der griber en 3D-hjertesfæroid. Kredit:Carnegie Mellon University Forskere fra Carnegie Mellon University (CMU) og Nanyang Technological University, Singapore (NTU
- Hvordan man bevarer medarbejdermoralen under omkostningsbesparelser
- Hvem er hvem på Blue Origins første bemandede fly
- Glatte væskeoverflader forvirrer muslinger
- SpaceX lancerer ølmalt, omsorgsfuld robot og mægtige mus
- Hvilke faktorer påvirker smeltepunktet?
- Sydvestlige piloter sagsøger Boeing for 737 MAX