


Tågerobotik:En ny tilgang til at opnå effektiv og flydende menneske-robot-interaktion
Kredit:Chand Gudi et al.
Forskere ved Innovation and Enterprise Research Laboratory (The Magic Lab) ved University of Technology Sydney har foreslået en ny robotarkitektur kaldet tågerobotik (FR). Deres tilgang, skitseret i et papir, der er forududgivet på arXiv, udnytter styrkerne ved tågecomputere, en decentraliseret computerstruktur, hvor ressourcer og data placeres mellem deres kilde og skyen.
I de kommende år, robotter vil sandsynligvis nå udbredt anvendelse i en række forskellige indstillinger, inklusive boliger, sundhedsfaciliteter, og flere brancher. Aktiv kommunikation er en nøglefaktor bag effektiv menneske-robot-interaktion, og forskere verden over forsøger således at udtænke nye strategier, der kan forbedre den måde, robotter kommunikerer på.
Cloud robotics (CR) giver robotter mulighed for at udføre omfattende beregninger i skyen ved at dele kort, billeder, data, aktiviteter, processorkraft og andre ressourcer online. Imidlertid, på grund af dets store data- og trafikbehov, CR medfører alvorlige latensproblemer, især i robot-menneske-interaktioner.
"Idéen om tågerobotik kom til at tænke på efter at have set en høj latenstid i en robots kommunikation, både i sine svar og i at nå sit mål, "Siva Leela Krishna Chand Gudi, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Vi spekulerede på, hvad der kunne ske i den nærmeste fremtid, når robotter vil tjene overalt, da denne forsinkelse sandsynligvis vil stige. Ved at arve funktionerne ved tågecomputere og gøre cloud-robotik til vores følgesvend, vi introducerede og opfandt begrebet tågerobotik, først på IROS 2017-konferencen."
Hovedformålet med undersøgelsen udført af Gudi og hans kolleger var at levere robuste, flydende og effektive menneske-robot-interaktioner med lav latenstid. Forskerne ønskede også at give robotter mulighed for at kommunikere og samarbejde med mennesker, mens de samtidig udfører opgaver, deler deres resultater eller aktiviteter inden for den samme familie af robotter. Dette ville i sidste ende gøre robotter til partnere, der forstår behovene hos mennesker, de interagerer med, reagere hurtigt og effektivt.
Kredit:Chand Gudi et al.
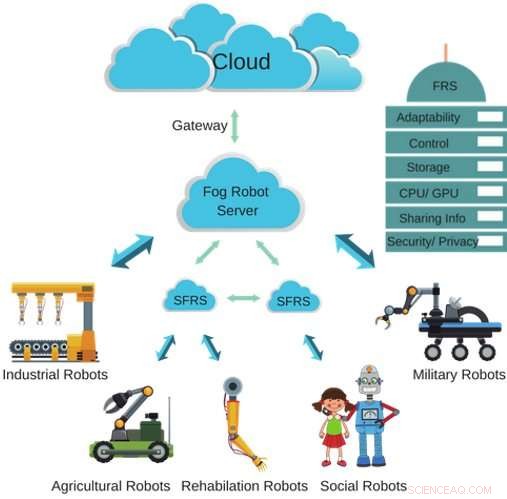
For at løse de problemer, der er forbundet med CR, forskerne foreslog og definerede en ny robotarkitektur kaldet tågerobotik (FR), bestående af opbevaring, netværksfunktioner, og decentraliseret databehandling, der er tættere på robotter. FR har tre hovedkomponenter:sub fog-robotserveren, tågerobotserveren, og skyen.
En robot sender en anmodning om information til FR-systemet, anmodede i første omgang om overdragelser til sub fog-robotserveren. Hvis denne server effektivt kan håndtere anmodningen, den videregiver den ønskede information til robotten; hvis det ikke kan, den søger assistance fra tågerobotserveren. Hvis denne server heller ikke er i stand til at behandle anmodningen, den beder om hjælp fra skyen, som typisk løser anmodningen og videregiver informationen til robotten.
Fordelene ved denne tilgang inkluderer en hurtig svarprocent, lav latenstid, forbedrede computeregenskaber, lavere energiforbrug, billigere hardware, og mindre sikkerheds- eller privatlivsproblemer. Med andre ord, FR kunne føre til robuste og hurtigere menneske-robot-interaktioner, samtidig med at robottens batterilevetid forbedres.
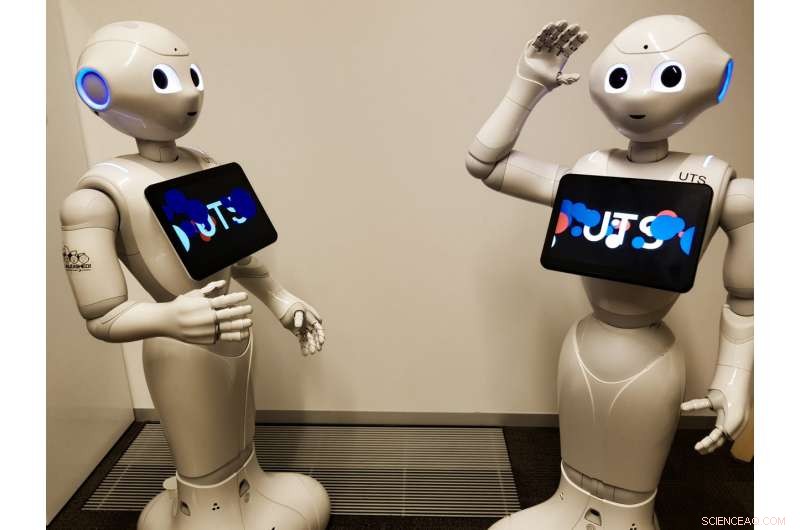
"Baseret på den gennemsnitlige forsinkelse modtaget af en social robotpeber og en opsætning af FRS/Cloud, vi betragtede en værdi af latenstid, " sagde Gudi. "Vi undersøgte senere vores nuværende metoder på en simuleringsplatform, evaluere deres potentielle effekter, når antallet af robotter stiger. Vi beviste, at FR giver lav latenstid og kan spille en væsentlig rolle i fremtiden, bliver en tilføjelse til CR."
I en række indledende evalueringer, FR opnåede meget hurtigere svarprocenter end CR-tilgange. Forskerne mener, at det kunne bruges uafhængigt eller integreret med CR, reducere byrden på skyen og forbedre servicekvaliteten (QoS).
Kredit:Chand Gudi et al.
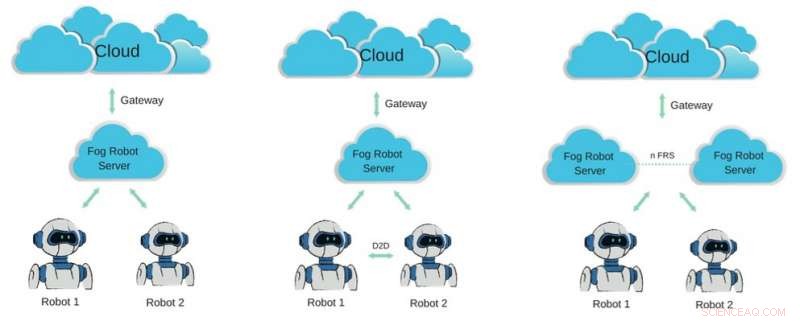
"Vi mennesker søger hjælp fra andre, når vi har brug for information, men robotter er begrænset til de opgaver, de er forprogrammeret til, Gudi forklarede. "FR giver også en robot mulighed for at dele sine data med en anden robot."
For bedre at forklare dette punkt, Gudi gav et eksempel på, hvordan flere robotter kan hjælpe mennesker inde i en lufthavn. I scenariet beskrevet af ham, en rejsende ville spørge en robot om placeringen af hans/hendes afgangsgate. Robotten ville guide den rejsende til rulletrappen og derefter overdrage opgaven til en anden robot, som ville vente i den anden ende af rulletrappen.
At genkende ham/hende, når de nærmer sig den anden ende af rulletrappen, denne anden robot ville kræve oplysninger om personens navn, identitet, køn og hvordan de ser ud. I denne situation, FR ville give disse to robotter mulighed for at samarbejde om opgaven og kommunikere med hinanden, hurtigt udveksle de nødvendige oplysninger for at fuldføre opgaven.
"På samme måde FR-teknikker kunne anvendes på universiteter, undergrundsbaner, industrielle robotter, og listen fortsætter, når forskellige områder inden for robotteknologi, " sagde Gudi. "I sidste ende, FR fører til robust menneske-robot interaktion med lav latenstid, mens du også sikrer personlige data ved at gemme dem i tågerobotserveren."
Forskerne har foretaget en række yderligere analyser, bl. som de snart vil offentliggøre online. De planlægger også at teste effektiviteten af FR på RoboCup i Sydney, hvor flere robotter skal konkurrere i naturen.
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 EU vil tvinge internetvirksomheder til at fjerne terrorindholdKredit:CC0 Public Domain EU-retskommissær Vera Jourova siger, at Europa-Kommissionen er indstillet på at afsløre nye regler, der kan tvinge internetvirksomheder til at fjerne formodet terrorindhol
EU vil tvinge internetvirksomheder til at fjerne terrorindholdKredit:CC0 Public Domain EU-retskommissær Vera Jourova siger, at Europa-Kommissionen er indstillet på at afsløre nye regler, der kan tvinge internetvirksomheder til at fjerne formodet terrorindhol -
 Elbilmarkedet sætter gang i koboltpriserneKoboltpriserne stiger, da investorerne satser på en enorm efterspørgsel fra bilindustrien Kobolt rammer historisk høje priser drevet af bilindustrien, som har brug for det sjældne metal til at lav
Elbilmarkedet sætter gang i koboltpriserneKoboltpriserne stiger, da investorerne satser på en enorm efterspørgsel fra bilindustrien Kobolt rammer historisk høje priser drevet af bilindustrien, som har brug for det sjældne metal til at lav -
 Enkel fremstilling af fuldfarve perovskite LED'erDen skematiske illustration af overordnede procedure og optiske egenskaber af anion-udvekslede perovskit nanokrystaller. Kredit:UNIST Et næste generations optisk materiale baseret på perovskit-nan
Enkel fremstilling af fuldfarve perovskite LED'erDen skematiske illustration af overordnede procedure og optiske egenskaber af anion-udvekslede perovskit nanokrystaller. Kredit:UNIST Et næste generations optisk materiale baseret på perovskit-nan -
 Air France reducerer omkostningerne, da coronavirus stikker:brevKredit:CC0 Public Domain Air France træffer nye omkostningsbesparende foranstaltninger, herunder en delvis ansættelsesfrysning, at opveje virkningen af coronavirus -udbruddet på rejsesektoren, i
Air France reducerer omkostningerne, da coronavirus stikker:brevKredit:CC0 Public Domain Air France træffer nye omkostningsbesparende foranstaltninger, herunder en delvis ansættelsesfrysning, at opveje virkningen af coronavirus -udbruddet på rejsesektoren, i
- Moderne dagbrug til Magnets
- Alsidig sensor mod tumorinitierende celler
- Enzymer og bakterier bevæger sig retningsbestemt, men bakterier mod mad, enzymer væk
- Hvor godt kan computere forbinde symptomer med sygdomme?
- Studie i spiraler af magnetisk spin viser potentialet af lagdelte materialer til fremtidig datalagri…
- Økonomisk genopretning efter nedlukning kan tage op til tre år