


Voksende bioinspirerede former med hundredvis af små robotter
En robot sværm. Den foretrukne robot i denne undersøgelse var kilobot. Kredit:Slavkov et al., Sci. Robot. 3, eaau9178 (2018)
Hundredvis af små robotter kan arbejde i et team for at skabe biologi-inspirerede former uden en underliggende masterplan, udelukkende baseret på lokal kommunikation og bevægelse. For at opnå dette, forskere fra EMBL, CRG og Bristol Robotics Laboratory introducerede de biologiske principper for selvorganisering til sværmrobotik. Resultaterne er blevet offentliggjort i Science Robotics .
"Vi viser, at det er muligt at anvende naturens begreber om selvorganisering på menneskelig teknologi som robotter, "siger EMBL Barcelona gruppeleder James Sharpe." Det er fascinerende, fordi teknologien er meget sprød i forhold til den robusthed, vi ser i biologi. Hvis en komponent i en bilmotor går i stykker, det resulterer normalt i en ikke-funktionel bil. Derimod, når et element i et biologisk system svigter, for eksempel hvis en celle dør uventet, det kompromitterer ikke hele systemet, og vil normalt blive erstattet af en anden celle senere. Hvis vi kunne opnå den samme selvorganisering og selvreparation inden for teknologi, Vi kan gøre det muligt for det at blive meget mere nyttigt, end det er nu. "Sharpe ledede projektet - igangsat på Center for Genomic Regulation (CRG) med Sabine Hauert ved University of Bristol.
Formdannelse set i robotsværmerne
Komplette forsøg varede i gennemsnit tre og en halv time. Inspireret af biologi, robotterne gemmer morfogener, virtuelle molekyler, der bærer mønsteroplysningerne. Farverne signalerer de enkelte roboters morfogenkoncentration:grønt angiver meget høje morfogenværdier, blå og lilla angiver lavere værdier, og ingen farve angiver virtuelt fravær af morfogen i robotten. Hver robots morfogenkoncentration sendes til nabobotter inden for et område på 10 centimeter. Det overordnede mønster af pletter, der dukker op, driver flytning af robotter til at vokse fremspring, der rækker ud fra sværmen.
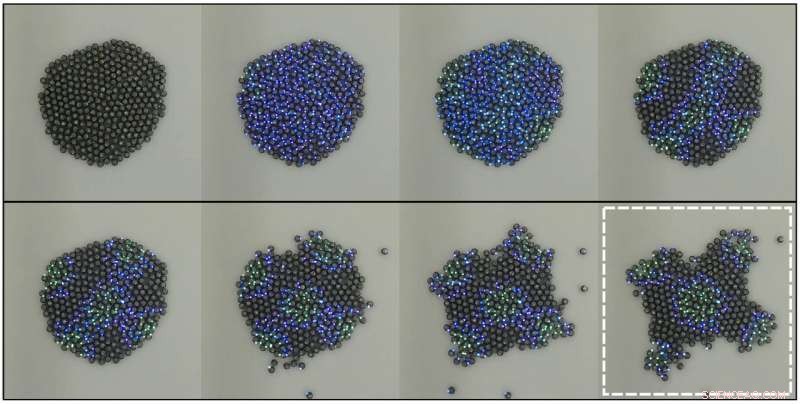
Fremkomsten af forskellige sværmsmorfologier via et Turing -diffusionsmønster. Kredit:Slavkov et al., Sci. Robot. 3, eaau9178 (2018)
Turings regler
De eneste oplysninger, som teamet installerede i robotter i møntstørrelse, var grundlæggende regler for, hvordan de skulle interagere med naboer. Faktisk, de programmerede specifikt robotterne i sværmen til at handle på samme måde som celler i et væv. Disse 'genetiske' regler efterligner det system, der er ansvarligt for Turing -mønstre observeret i naturen, som arrangementet af fingre på en hånd eller pletterne på en leopard. På denne måde, projektet samler to af Alan Turings fascinationer:datalogi og mønsterdannelse i biologi.
Robotterne er afhængige af infrarød besked for at kommunikere med naboer inden for et område på 10 centimeter. Dette gør, at robotterne ligner biologiske celler, da de også kun direkte kan kommunikere med andre celler fysisk tæt på dem.
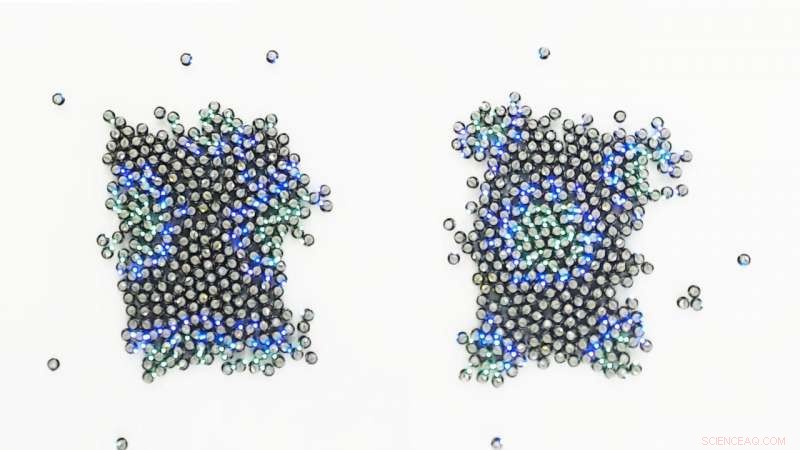
Sværmen danner forskellige former ved at flytte robotter fra områder med lav morfogenkoncentration til områder med høj morfogenkoncentration - kaldet 'Turing spots, "hvilket fører til væksten af fremspring, der når ud fra sværmen." Det er smukt at se sværmen vokse til former, det ser ganske organisk ud. Det fascinerende er, at der ikke er nogen masterplan, disse former dukker op som et resultat af simple interaktioner mellem robotterne. Dette adskiller sig fra tidligere arbejde, hvor formerne ofte var foruddefinerede, ”siger Sabine Hauert.

Robotterne blev brugt under eksperimenterne. Formen på denne særlige sværm er en håndlavet illustration af teknikken. Kredit:AAAS
Arbejde med store robotsværme
Det er umuligt at studere sværmadfærd med blot et par robotter. Holdet brugte mindst 300 i de fleste forsøg. At arbejde med hundredvis af små robotter er en udfordring i sig selv. De var i stand til at gøre dette takket være en særlig opsætning, hvorved forsøg let kunne stoppes, og alle robotterne omprogrammerede på én gang ved hjælp af lys. Forskerne gennemførte over 20 forsøg med store sværme, hvor hvert forsøg tager omkring tre og en halv time.
Desuden, ligesom i biologi, ting gik ofte galt. Robotter gik i stå, eller bugseret væk fra sværmen i den forkerte retning. "Det er den slags ting, der ikke sker i simuleringer, men kun når du laver eksperimenter i det virkelige liv, "siger Ivica Slavkov, der deler første forfatterskab af papiret med Daniel Carrillo-Zapata.
Alle disse detaljer gjorde projektet udfordrende. Den tidlige del af projektet blev udført i computersimuleringer, og det tog teamet cirka tre år, før den rigtige robotsværm fik sin første form. Men robotternes begrænsninger tvang også teamet til at udtænke kloge, robuste mekanismer til at orkestrere sværmemønstringen. Ved at hente inspiration fra formdannelse i biologi, teamet var i stand til at vise, at deres robotformer kunne tilpasse sig skader og selvreparation. Sværmens store formdannelse er langt mere pålidelig end hver af de små robotter; helheden er større end summen af delene.
Mens forskerne tog inspiration fra naturen til at dyrke sværmformerne, målet er i sidste ende at lave store robotsværme til virkelige applikationer. Forestil dig hundredvis eller tusinder af bittesmå robotter, der ændrer formation for at tilpasse sig et katastrofemiljø efter et jordskælv eller brand, eller skulptere sig selv til en dynamisk 3D-struktur såsom en midlertidig bro, der automatisk kunne justere dens størrelse og form, så den passer til enhver bygning eller terræn. "Fordi vi tog inspiration fra biologisk formdannelse, som er kendt for at være selvorganiseret og robust over for fiasko, sådanne sværme kan stadig blive ved med at fungere, selvom nogle robotter blev beskadiget, "siger Daniel Carrillo-Zapata. Der er dog stadig en lang vej at gå, før vi ser sådanne sværme uden for laboratoriet.
 Varme artikler
Varme artikler
-
 Eleven bruger kunstig intelligens til at diagnosticere plantesygdommeShaza Mehdi i statens botaniske have i Georgia. Kredit:Dorothy Kozlowski/UGA For nogle, en rose er et symbol på skønhed eller kærlighed. For Shaza Mehdi, det er en forbindelse til hendes mor, men
Eleven bruger kunstig intelligens til at diagnosticere plantesygdommeShaza Mehdi i statens botaniske have i Georgia. Kredit:Dorothy Kozlowski/UGA For nogle, en rose er et symbol på skønhed eller kærlighed. For Shaza Mehdi, det er en forbindelse til hendes mor, men -
 Apple sænker priserne, øger tjenesterne, når iPhone 11 lanceresApples Kaiann Drance fortæller om den nye iPhone 11 under en lanceringsbegivenhed på Apples Cupertino, Californiens campus Apple afslørede sine iPhone 11-modeller tirsdag med en prisnedsættelse fo
Apple sænker priserne, øger tjenesterne, når iPhone 11 lanceresApples Kaiann Drance fortæller om den nye iPhone 11 under en lanceringsbegivenhed på Apples Cupertino, Californiens campus Apple afslørede sine iPhone 11-modeller tirsdag med en prisnedsættelse fo -
 Halvdelen af amerikanske udenlandske overskud bogført i skattely:papirAmerikanske virksomheder er langt de største brugere af skattely, hvor de står over for effektive skattesatser på kun syv procent, ifølge undersøgelsen foretaget af økonomerne Thomas Wright og Gabriel
Halvdelen af amerikanske udenlandske overskud bogført i skattely:papirAmerikanske virksomheder er langt de største brugere af skattely, hvor de står over for effektive skattesatser på kun syv procent, ifølge undersøgelsen foretaget af økonomerne Thomas Wright og Gabriel -
 Ny kinematik til tilpasset, fræsning med høj præcisionBearbejdningsrobot Flexmatik. Kredit:Fraunhofer IFAM Producenter skal generelt tilbyde produkter af høj kvalitet til lave priser for at forblive konkurrencedygtige. Tre Fraunhofer-institutter arbe
Ny kinematik til tilpasset, fræsning med høj præcisionBearbejdningsrobot Flexmatik. Kredit:Fraunhofer IFAM Producenter skal generelt tilbyde produkter af høj kvalitet til lave priser for at forblive konkurrencedygtige. Tre Fraunhofer-institutter arbe
- Videnskaben bag, hvorfor nogle mennesker elsker dyr, og andre kunne være ligeglade
- Kunne vi virkelig sprænge en indkommende asteroide med en atombombe?
- Sådan vurderer du Trig-funktioner uden en beregner
- Software forudsiger stigning og fald for hver flod på Jorden
- Hvordan hackere kunne forårsage kaos på veje og jernbaner i Amerika
- BoE-chefen opfordrer til hurtigere handling mod klimaændringer