


En ny robot, der er i stand til at lære ejerskabsrelationer og normer
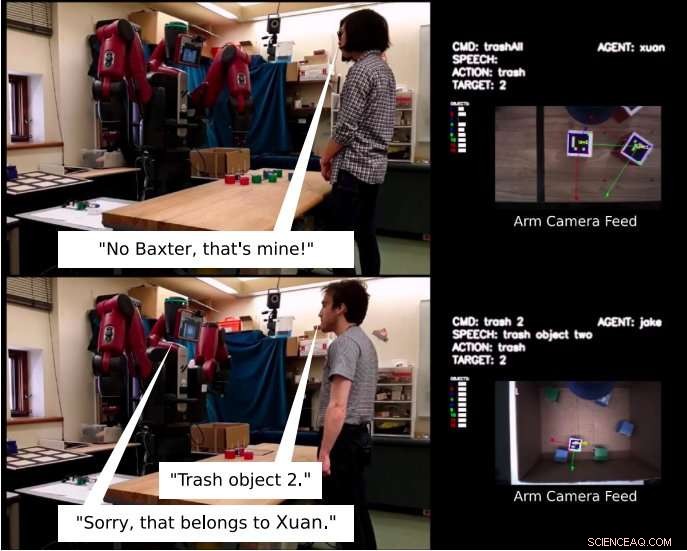
Ejerskabslæring via menneske-robot-interaktion. Øverst:Robotten bliver verbalt standset midt i handling af Xuan fra at kassere objekt 2. Nederst:Efter at have lært ejerskabsrelationerne og handlingstilladelserne ved at interagere med Xuan, robotten afviser Jakes anmodning om at kassere objekt 2. Kredit:Tan, Brawer &Scassellati.
Et team af forskere ved Yale University har for nylig udviklet et robotsystem, der er i stand til at repræsentere, lære og udlede ejerforhold og normer. Deres studie, forudgivet på arXiv, adresserer nogle af de komplekse udfordringer, der er forbundet med at lære robotter sociale normer, og hvordan man overholder dem.
Efterhånden som robotter bliver mere udbredte, det er vigtigt for dem at være i stand til at kommunikere med mennesker både effektivt og hensigtsmæssigt. Et nøgleaspekt af menneskelig interaktion er at forstå og opføre sig i overensstemmelse med sociale og moralske normer, da dette fremmer positiv sameksistens med andre.
Ejerskabsnormer er et sæt sociale normer, der hjælper med at navigere i fælles miljøer på måder, der er mere hensynsfulde over for andre. At lære disse normer til robotter kunne forbedre deres interaktion med mennesker, giver dem mulighed for at skelne mellem ikke-ejede værktøjer og ejede værktøjer, der midlertidigt deles med dem.
"Mit forskningslaboratorium fokuserer på at bygge robotter, der er nemme for folk at interagere med, "Brian Scassellati, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "En del af det arbejde er at se på, hvordan vi kan lære maskiner om fælles sociale koncepter, ting, der er væsentlige for os som mennesker, men som ikke altid er de emner, der tiltrækker mest opmærksomhed. Forståelse af objektejerskaber, tilladelser, og told er et af disse emner, der ikke rigtig har fået meget opmærksomhed, men som vil være afgørende for den måde, maskiner fungerer på i vores hjem, skoler, og kontorer."
I den tilgang, som Scassellati har udtænkt, Xuan Tan og Jake Brawer, ejerskab er repræsenteret som en graf over sandsynlighedsrelationer mellem objekter og deres ejere. Dette er kombineret med en database med prædikatbaserede normer, som begrænser de handlinger, som robotten må udføre ved hjælp af ejede objekter.
"En af udfordringerne i dette arbejde er, at nogle af de måder, vi lærer om ejerskab, er gennem at blive fortalt eksplicitte regler (f.eks. 'tag ikke mine værktøjer'), og andre læres gennem erfaring, " sagde Scassellati. "At kombinere disse to typer læring kan være let for folk, men er meget mere udfordrende for robotter."
Systemet udviklet af forskerne kombinerer en ny inkrementel normindlæringsalgoritme, der er i stand til både one-shot læring og induktion fra eksempler, med Bayesiansk slutning af ejerskabsforhold som svar på tilsyneladende regelbrud og opfattelsesbaseret forudsigelse af et objekts sandsynlige ejere. Sammen, disse komponenter gør det muligt for systemet at lære ejerskabsnormer og relationer gældende i en række forskellige situationer.
"Nøglen til det arbejde, Xuan og Jake gjorde, var at kombinere to forskellige former for maskinlæringsrepræsentation, en, der lærer af disse eksplicitte, symbolske regler og en, der lærer af små stykker erfaring, Scassellati forklarede. "At få disse to systemer til at fungere sammen er både det, der gør dette udfordrende, og til sidst, hvad gjorde dette vellykket."
Forskerne evaluerede ydeevnen af deres robotsystem i en række simulerede eksperimenter i den virkelige verden. De fandt ud af, at det effektivt kunne fuldføre objektmanipulationsopgaver, der krævede en række ejerskabsnormer, der skulle følges, med bemærkelsesværdig kompetence og fleksibilitet.
Undersøgelsen udført af Scassellati og hans kolleger giver et bemærkelsesværdigt eksempel på, hvordan robotter kan trænes til at udlede og respektere sociale normer. Yderligere forskning kunne anvende lignende konstruktioner på andre normrelaterede evner og adressere komplekse situationer, hvor forskellige normer eller mål er i konflikt med hinanden.
"Vi fortsætter med at se på, hvordan man bygger robotter, der interagerer mere naturligt med mennesker, og denne undersøgelse fokuserer kun på ét aspekt af dette arbejde, " sagde Scassellati.
© 2018 Science X Network
Sidste artikelPapirsensorer fjerner stikket af diabetisk test
Næste artikelBrasiliens domstol tilsidesætter påbud om Boeing-Embraer-binding
 Varme artikler
Varme artikler
-
 Miljøvenlig kulfyret teknologi til stabelløse kraftværker uden emissionerOxy-Circulating Fluidized Bed Combustion system er en miljøvenlig avanceret elproduktionsteknologi til at imødegå udfordringen med klimaændringer. Det kan udskille CO2 under forbrændingsprocessen, bru
Miljøvenlig kulfyret teknologi til stabelløse kraftværker uden emissionerOxy-Circulating Fluidized Bed Combustion system er en miljøvenlig avanceret elproduktionsteknologi til at imødegå udfordringen med klimaændringer. Det kan udskille CO2 under forbrændingsprocessen, bru -
 Toyota skærer ned i prognosen for hele året, advarer om BrexitToyotas nye årlige prognose repræsenterer et fald på 25 procent i forhold til året før Den japanske bilgigant Toyota sænkede onsdag sin prognose for årets nettoresultat efter at have sagt, at dens
Toyota skærer ned i prognosen for hele året, advarer om BrexitToyotas nye årlige prognose repræsenterer et fald på 25 procent i forhold til året før Den japanske bilgigant Toyota sænkede onsdag sin prognose for årets nettoresultat efter at have sagt, at dens -
 Coronavirus -udbrud:Sociale medieplatforme kæmper for at indeholde misinformationKredit:CC0 Public Domain Hoaxes om coronavirus spredes lige så hurtigt, hvis ikke hurtigere, end den faktiske virus på Facebook, YouTube og Twitter, og de sociale medieplatforme kæmper for at inde
Coronavirus -udbrud:Sociale medieplatforme kæmper for at indeholde misinformationKredit:CC0 Public Domain Hoaxes om coronavirus spredes lige så hurtigt, hvis ikke hurtigere, end den faktiske virus på Facebook, YouTube og Twitter, og de sociale medieplatforme kæmper for at inde -
 3-D-printbar gratis maskedesign er den første af sin slags, der får føderal godkendelseKredit:CC0 Public Domain Den tidligere Microsoft-direktør Jonathan Roberts ved, at ikke alt 3-D-printet personligt beskyttelsesudstyr, der produceres til landets coronavirus-respons, er skabt lige
3-D-printbar gratis maskedesign er den første af sin slags, der får føderal godkendelseKredit:CC0 Public Domain Den tidligere Microsoft-direktør Jonathan Roberts ved, at ikke alt 3-D-printet personligt beskyttelsesudstyr, der produceres til landets coronavirus-respons, er skabt lige
- Sådan identificeres et Metal
- Opdagelse af 10 faser af plasma fører til ny indsigt inden for fusion og plasmavidenskab
- Hvad er natriumsilikat?
- Udvikling af en strækbar vibrationsdrevet enhed ved hjælp af en flydende elektret
- Bangladesh lukker et af verdens mest forurenede steder
- Forskere overvejer den voksende tendens til at arbejde i kaffebarer