


Ingeniører bygger et blødt robotikopfattelsessystem inspireret af mennesker

Et internationalt team af forskere har udviklet et opfattelsessystem for bløde robotter inspireret af den måde, hvorpå mennesker behandler oplysninger om deres egen krop i rummet og i forhold til andre objekter og mennesker. De beskriver systemet, som inkluderer et motion capture -system, bløde sensorer, et neuralt netværk, og en blød robotfinger, i 30. januar -udgaven af Science Robotics . Kredit:University of California San Diego
Et internationalt team af forskere har udviklet et opfattelsessystem for bløde robotter inspireret af den måde, hvorpå mennesker behandler oplysninger om deres egen krop i rummet og i forhold til andre objekter og mennesker. De beskriver systemet, som inkluderer et motion capture -system, bløde sensorer, et neuralt netværk, og en blød robotfinger, i 30. januar -udgaven af Science Robotics .
Forskernes ultimative mål er at bygge et system, der kan forudsige en robots bevægelser og indre tilstand uden at stole på eksterne sensorer, ligesom mennesker gør hver dag. I deres Science Robotics papir, de viser, at de har opnået dette mål for en blød robotfinger. Arbejdet har anvendelser inden for menneske-robot-interaktion og bærbar robotik, samt bløde anordninger til at korrigere lidelser, der påvirker muskler og knogler.
Systemet er beregnet til at efterligne de forskellige komponenter, der kræves for, at mennesker kan navigere i deres omgivelser:motion capture -systemet står for syn; det neurale netværk står for hjernens funktioner; sensorer til berøring; og fingeren for kroppen, der interagerer med omverdenen. Motion capture -systemet er der for at træne det neurale netværk og kan kasseres, når træningen er gennemført.
"Fordelene ved vores tilgang er evnen til at forudsige komplekse bevægelser og kræfter, som den bløde robot oplever (hvilket er svært med traditionelle metoder) og det faktum, at den kan anvendes på flere typer aktuatorer og sensorer, "sagde Michael Tolley, en professor i mekanik og rumfartsteknik ved University of California San Diego og papirets seniorforfatter. "Vores metode omfatter også redundante sensorer, hvilket forbedrer den overordnede robusthed af vores forudsigelser. "
-

Den bløde robotfinger giver haptisk og bevægelsesinformation til systemet. Kredit:University of California San Diego
-
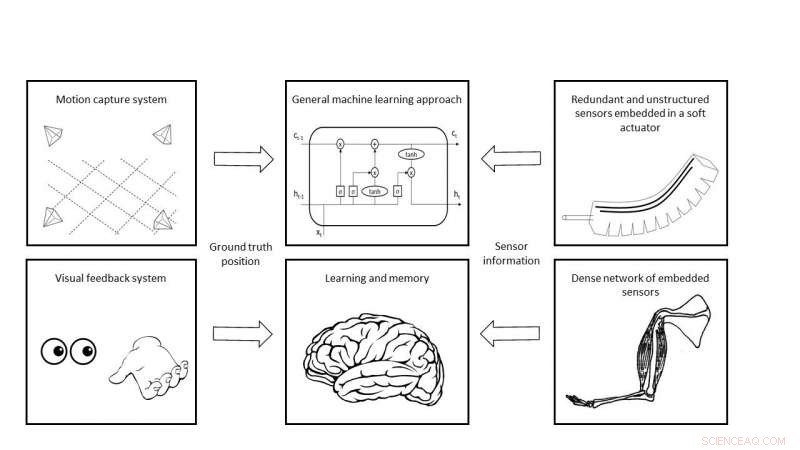
Oversigt over modelleringsarkitekturen og dens parallel til det menneskelige opfattelsessystem. Kredit:University of California San Diego
Forskere indlejrede bløde belastningssensorer vilkårligt i den bløde robotfinger, vel vidende at de ville være lydhøre over for en lang række forskellige bevægelser, og brugte machine learning -teknikker til at fortolke sensorernes signaler. Dette tillod holdet, som omfatter forskere fra Bioinspired Robotics and Design Lab ved UC San Diego, at forudsige kræfter, der anvendes på, og bevægelser af, fingeren. Denne tilgang vil gøre det muligt for forskere at udvikle modeller, der kan forudsige kræfter og deformationer, som bløde robotsystemer oplever, når de bevæger sig.
Dette er vigtigt, fordi de teknikker, der traditionelt bruges i robotteknologi til behandling af sensordata, ikke kan fange de komplekse deformationer af bløde systemer. Ud over, den information, sensorerne indsamler, er lige så kompleks. Som resultat, sensor design, placering og fremstilling i bløde robotter er vanskelige opgaver, der kan forbedres betydeligt, hvis forskere havde adgang til robuste modeller. Dette håber forskergruppen at give.
Næste trin omfatter opskalering af antallet af sensorer for bedre at efterligne den tætte sanseevne for biologisk hud og lukke sløjfen til feedbackstyring af aktuatoren.
 Varme artikler
Varme artikler
-
 Airbnb siger tvunget til at annullere bookinger i henhold til ny japansk lovAirBnb sagde, at Japans regering havde krævet, at den annullerede alle reservationer med værter, der endnu ikke har registreret, selvom de var i gang med at søge licens Udlejningssted Airbnb sagde
Airbnb siger tvunget til at annullere bookinger i henhold til ny japansk lovAirBnb sagde, at Japans regering havde krævet, at den annullerede alle reservationer med værter, der endnu ikke har registreret, selvom de var i gang med at søge licens Udlejningssted Airbnb sagde -
 Toyota poster rekord i første kvartal, fastholder helårsprognosenToyota fastholdt sin prognose, at for regnskabsåret til marts 2019, nettoresultatet ville falde 15 procent Den japanske bilgigant Toyota offentliggjorde fredag et rekordresultat i første kvartal
Toyota poster rekord i første kvartal, fastholder helårsprognosenToyota fastholdt sin prognose, at for regnskabsåret til marts 2019, nettoresultatet ville falde 15 procent Den japanske bilgigant Toyota offentliggjorde fredag et rekordresultat i første kvartal -
 Materialer øget kapacitet, effektivitet kunne sænke barren for brintteknologiSandia-forskere Vitalie Stavila, venstre, og Mark Allendorf er en del af et multilab-konsortium for at fremme lagermaterialer til fremtidig brintdrevet transport. Kredit:Dino Vournas Brint som en
Materialer øget kapacitet, effektivitet kunne sænke barren for brintteknologiSandia-forskere Vitalie Stavila, venstre, og Mark Allendorf er en del af et multilab-konsortium for at fremme lagermaterialer til fremtidig brintdrevet transport. Kredit:Dino Vournas Brint som en -
 Tesla -aktier falder på rapporter om SEC -stævningNogle Tesla -bestyrelsesmedlemmer blev angiveligt taget af vagt af administrerende direktør Elon Musks tweets om muligvis at tage virksomheden privat og har opfordret den kontroversielle administreren
Tesla -aktier falder på rapporter om SEC -stævningNogle Tesla -bestyrelsesmedlemmer blev angiveligt taget af vagt af administrerende direktør Elon Musks tweets om muligvis at tage virksomheden privat og har opfordret den kontroversielle administreren
- Hvordan luftforurening ændrede sig under COVID-19 i Park City, Utah
- Gamle Mayakanaler og marker viser tidlige og omfattende påvirkninger af tropiske skove
- NASA-ledet undersøgelse løser et metan-puslespil
- Ultrasensitiv DNA-kvantificering ved lysspredning
- Ny superklynge opdaget af astronomer
- Schweizisk domstol erklærer chaufføren for en Uber-medarbejder