


Et skridt nærmere selvbevidste maskiner – ingeniører skaber en robot, der kan forestille sig selv
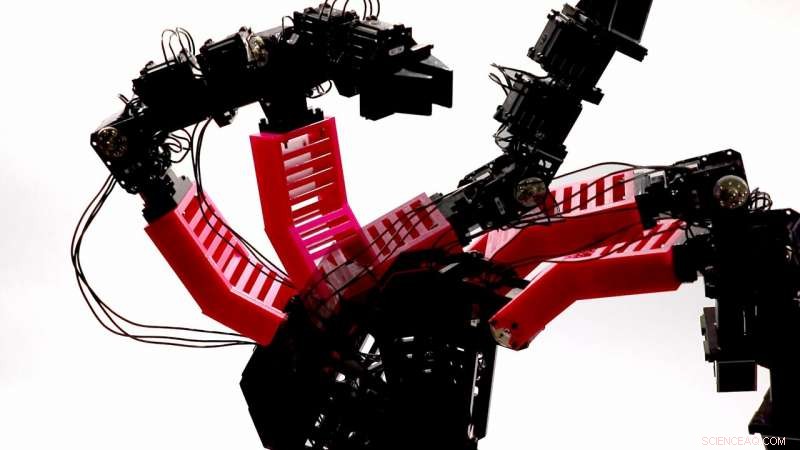
Et billede af den deformerede robotarm i flere stillinger, mens den indsamlede data gennem tilfældig bevægelse. Kredit:Robert Kwiatkowski/Columbia Engineering
Robotter, der er selvbevidste, har været science fiction-foder i årtier, og nu kommer vi måske endelig nærmere. Mennesker er unikke ved at være i stand til at forestille sig sig selv – at se sig selv ind i fremtidige scenarier, såsom at gå langs stranden på en varm solskinsdag. Mennesker kan også lære ved at gense tidligere erfaringer og reflektere over, hvad der gik rigtigt eller forkert. Mens mennesker og dyr tilegner sig og tilpasser deres selvbillede i løbet af deres levetid, de fleste robotter lærer stadig ved hjælp af menneskeskabte simulatorer og modeller, eller ved besværlig, tidskrævende forsøg og fejl. Robotter har ikke lært at simulere sig selv, som mennesker gør.
Columbia Engineering-forskere har gjort et stort fremskridt inden for robotteknologi ved at skabe en robot, der lærer, hvad den er, fra starten, med ingen forudgående viden om fysik, geometri, eller motorisk dynamik. I starten ved robotten ikke, om det er en edderkop, en slange, en arm - den har ingen anelse om, hvad dens form er. Efter en kort periode med "pludren, "og inden for omkring en dag med intensiv databehandling, deres robot skaber en selvsimulering. Robotten kan derefter bruge den selvsimulator internt til at overveje og tilpasse sig forskellige situationer, varetagelse af nye opgaver samt opdage og reparere skader i egen krop. Værket udgives i dag i Videnskab robotik .
Til dato, robotter har fungeret ved at lade et menneske eksplicit modellere robotten. "Men hvis vi ønsker, at robotter skal blive uafhængige, at tilpasse sig hurtigt til scenarier uforudsete af deres skabere, så er det vigtigt, at de lærer at simulere sig selv, " siger Hod Lipson, professor i maskinteknik, og direktør for Creative Machines lab, hvor undersøgelsen er lavet.
Til studiet, Lipson og hans ph.d. studerende Robert Kwiatkowski brugte en leddelt robotarm med fire frihedsgrader. I første omgang, robotten bevægede sig tilfældigt og samlede omkring tusinde baner, hver med hundrede point. Robotten brugte derefter deep learning, en moderne maskinlæringsteknik, at skabe en selvmodel. De første selvmodeller var ret unøjagtige, og robotten vidste ikke hvad det var, eller hvordan dens led var forbundet. Men efter mindre end 35 timers træning, selvmodellen blev konsistent med den fysiske robot inden for omkring fire centimeter. Selvmodellen udførte en pick-and-place-opgave i et lukket sløjfesystem, der gjorde det muligt for robotten at genkalibrere sin oprindelige position mellem hvert trin langs banen udelukkende baseret på den interne selvmodel. Med den lukkede sløjfe kontrol, robotten var i stand til at gribe genstande på bestemte steder på jorden og anbringe dem i en beholder med 100 procent succes.
Selv i et åbent sløjfesystem, som indebærer at udføre en opgave udelukkende baseret på den interne selvmodel, uden ekstern feedback, robotten var i stand til at fuldføre pick-and-place opgaven med en succesrate på 44 procent. "Det er som at prøve at tage et glas vand op med lukkede øjne, en proces, der er svær selv for mennesker, " observerede undersøgelsens hovedforfatter Kwiatkowski, en ph.d. studerende i datalogiafdelingen, der arbejder i Lipsons laboratorium.
Den selvmodellerende robot blev også brugt til andre opgaver, såsom at skrive tekst ved hjælp af en markør. For at teste om selvmodellen kunne opdage skader på sig selv, forskerne 3-D-printede en deformeret del for at simulere skade, og robotten var i stand til at opdage ændringen og genoptræne sin selvmodel. Den nye selvmodel gjorde det muligt for robotten at genoptage sine pick-and-place-opgaver med lidt tab af ydeevne.

Et billede af den intakte robotarm, der blev brugt til at udføre alle opgaverne Kredit:Robert Kwiatkowski/Columbia Engineering
Lipson, som også er medlem af Data Science Institute, bemærker, at selvbilleddannelse er nøglen til at sætte robotter i stand til at bevæge sig væk fra begrænsningerne af såkaldt "narrow-AI" mod mere generelle evner. "Det er måske, hvad et nyfødt barn gør i sin vugge, efterhånden som den lærer, hvad den er, " siger han. "Vi formoder, at denne fordel også kan have været den evolutionære oprindelse til selvbevidsthed hos mennesker. Mens vores robots evne til at forestille sig sig selv stadig er rå sammenlignet med mennesker, vi tror på, at denne evne er på vej til maskinel selvbevidsthed."
Lipson mener, at robotteknologi og kunstig intelligens kan tilbyde et nyt vindue ind i bevidsthedens ældgamle puslespil. "Filosoffer, psykologer, og kognitive videnskabsmænd har overvejet naturens selvbevidsthed i årtusinder, men har gjort relativt små fremskridt, " bemærker han. "Vi skjuler stadig vores manglende forståelse med subjektive udtryk som 'virkelighedens lærred, ' men robotter tvinger os nu til at omsætte disse vage forestillinger til konkrete algoritmer og mekanismer."
Lipson og Kwiatkowski er klar over de etiske implikationer. "Selvbevidsthed vil føre til mere modstandsdygtige og adaptive systemer, men indebærer også et vist tab af kontrol, " advarer de. "Det er en kraftfuld teknologi, men det skal håndteres med omtanke."
The researchers are now exploring whether robots can model not just their own bodies, but also their own minds, whether robots can think about thinking.
 Varme artikler
Varme artikler
-
 Denne lille tyske by tog magten tilbage - og blev fuldt ud vedvarendeKredit:F4 Luftbilder/Shutterstock.com Sagen for ambitiøs og transformativ miljøpolitik fremsættes med stigende iver, og en række Green New Deals - en henvisning til Roosevelts økonomiske reformpro
Denne lille tyske by tog magten tilbage - og blev fuldt ud vedvarendeKredit:F4 Luftbilder/Shutterstock.com Sagen for ambitiøs og transformativ miljøpolitik fremsættes med stigende iver, og en række Green New Deals - en henvisning til Roosevelts økonomiske reformpro -
 Solpaneler erstattede asfalt på en motorvej - her er resultaterneEn vej til ingen steder? Kredit:Robert B.D. Brice/Wattway For fire år siden bejlede en viral kampagne til verden med et løfte om at bekæmpe klimaændringer og sætte gang i økonomien ved at erstatte
Solpaneler erstattede asfalt på en motorvej - her er resultaterneEn vej til ingen steder? Kredit:Robert B.D. Brice/Wattway For fire år siden bejlede en viral kampagne til verden med et løfte om at bekæmpe klimaændringer og sætte gang i økonomien ved at erstatte -
 Sikring af tingenes internet i kvantealderenMIT-forskere har udviklet en ny chip, der kan beregne komplekse kvantesikre krypteringssystemer effektivt nok til at beskytte tingenes internet (IoT)-enheder med lav effekt. Kredit:Massachusetts Insti
Sikring af tingenes internet i kvantealderenMIT-forskere har udviklet en ny chip, der kan beregne komplekse kvantesikre krypteringssystemer effektivt nok til at beskytte tingenes internet (IoT)-enheder med lav effekt. Kredit:Massachusetts Insti -
 Finde fejl i el-nettetKredit:CC0 Public Domain En vestaustralsk forsker har udviklet software, der kan hjælpe os med at undgå endnu en sort lørdag-katastrofe Lige før middag lørdag den 7. februar 2009 i det landlige V
Finde fejl i el-nettetKredit:CC0 Public Domain En vestaustralsk forsker har udviklet software, der kan hjælpe os med at undgå endnu en sort lørdag-katastrofe Lige før middag lørdag den 7. februar 2009 i det landlige V
- Gennemsigtige grafenelektroder kan føre til en ny generation af solceller
- Er et økosystem større eller mindre end en biom?
- Google hævder, at deres kortsigtede vejrudsigter er mere nøjagtige end avancerede modeller
- Ingen undslippende havplastik:37 millioner stumper affald på en af verdens fjerneste øer
- C60 kunne danne en ny slags gel
- Sådan beregnes regressionskoefficient