


En ny metode til at generere gestus for forskellige sociale robotter
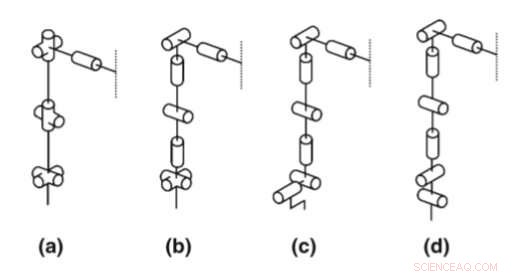
Visualisering af højre armledskonfiguration af et antal robotter med 7 DOF -arme. Den stiplede linje repræsenterer midterlinjen af kroppen. en ASIMO, b ARMAR-III, c WABIAN-2, d iCub Credit:Van de Perre et al.
Sociale robotter er designet til at kommunikere med mennesker naturligt, hjælpe dem med forskellige opgaver. Den effektive brug af bevægelser kan i høj grad forbedre robot-menneskelige interaktioner, gør det muligt for robotter at kommunikere både verbalt og ikke-verbalt.
Designet af de fleste sociale robotter er inspireret af menneskekroppen, da dette gør det lettere at replikere menneskelignende gestus og adfærd. Imidlertid, forskellige robotter kan have forskellige morfologier, som giver dem mulighed for bedst at tackle de opgaver, de er designet til at udføre.
Forskere ved Vrije Universiteit Brussel, i Belgien, har for nylig introduceret en ny tilgang baseret på en generisk gestusmetode for at studere indflydelsen fra forskellige designaspekter. Deres papir, udgivet på Springer's International Journal of Social Robotics , præsenterer en ramme, der hurtigt genererer bevægelser, der matcher en robots specifikke konfiguration.
"I denne avis, vi foreslår en ny metode til at studere indflydelsen fra forskellige designaspekter baseret på en generisk gestusmetode, "forskerne skrev i deres papir." Gest -metoden blev udviklet for at overvinde vanskelighederne ved at overføre gestus til forskellige robotter, giver en løsning på korrespondanceproblemet. "
Metoden, som dette team af forskere har udviklet, kunne overvinde vanskeligheder med at overføre gestus til robotter af forskellige former og konfigurationer. Brugere kan indtaste en robots morfologiske oplysninger, og værktøjet vil bruge disse data til at beregne bevægelser for den pågældende robot.
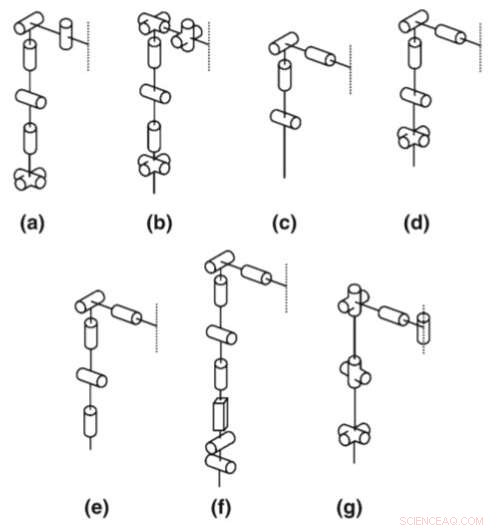
Visualisering af højre armledskonfiguration af en række robotter med forskellige armmorfologier. Den stiplede linje repræsenterer midterlinjen af kroppen. en Pyrène, b WE-4RII, c Robovie, d KHR-3, e NAO, f R1, g ARMAR-IV. Kredit:Van de Perre et al.
"Et lille sæt morfologiske oplysninger, indtastet af brugeren, bruges til at evaluere den generelle ramme for softwaren ved runtime, "forklarede forskerne." Derfor er bevægelser kan beregnes hurtigt og nemt for en ønsket robotkonfiguration. Ved at generere et sæt gestus for forskellige morfologier, betydningen af specifikke led og deres indflydelse på en række stillinger og fagter kan undersøges. "
For at sikre, at deres metode ville være anvendelig på forskellige typer robotter, forskerne hentede inspiration fra en menneskelig basismodel. Denne model består af forskellige kæder og blokke, som bruges til at modellere menneskers forskellige rotationsmuligheder. Forskerne tildelte en referenceramme til hver fælles blok ved hjælp af den menneskelige basismodel som reference til at konstruere de generelle rammer bag deres metode.
"For at generere fagter for en bestemt robotmodel, metoden bruger konfigurationens parametre Denavit-Hartenberg (DH) som input, hvorved robotens forskellige led grupperes i kæder og blokke af den menneskelige basismodel, "forklarede forskerne i deres papir." Ved runtime, metodens generiske ramme evalueres ved hjælp af disse oplysninger, og som sådan, tilpasset den pågældende robot. "
Da forskellige funktioner er vigtige for forskellige former for gestus, metoden, som forskerne har udtænkt, er designet til at fungere i to forskellige tilstande, nemlig bloktilstanden og sluteffektortilstanden. Blokfunktionen bruges til at beregne gestus som følelsesmæssige udtryk i tilfælde, hvor den samlede armplacering er afgørende. Slut effektor tilstand, på den anden side, beregner bevægelser i situationer, hvor slut-effektorens position er vigtig, såsom under objektmanipulation eller pegning.
"Gest -metoden beviser sin anvendelighed i designprocessen af sociale robotter ved at give et indtryk af den nødvendige kompleksitet, der er nødvendig for en bestemt opgave, og kan give interessant indsigt i det nødvendige ledvinkelområde, "sagde forskerne.
I deres undersøgelse, forskerne anvendte deres metode til den virtuelle model af en robot kaldet Probo. De brugte dette eksempel til at illustrere, hvordan deres metode kunne hjælpe med at studere kollokationen af forskellige led og ledvinkelområder i fagter. I fremtiden, deres tilgang kunne hjælpe udviklingen af sociale robotter, der kan udføre naturlige gestus, der passer til deres morfologi og anvendelse.
© 2019 Science X Network
Sidste artikelForskere opfinder en nål, der ved, hvor den skal hen
Næste artikelReddit åbner Dublin -kontoret i år
 Varme artikler
Varme artikler
-
 Elon Musk borer en tunnel for at revolutionere bykørselElon Musk afslørede en prøvetunnel, del af en vision for et underjordisk netværk, som biler kan sænkes ned i og derefter køres langs spor med hastigheder op til 150 mph (241 kmt) Elon Musk tog tir
Elon Musk borer en tunnel for at revolutionere bykørselElon Musk afslørede en prøvetunnel, del af en vision for et underjordisk netværk, som biler kan sænkes ned i og derefter køres langs spor med hastigheder op til 150 mph (241 kmt) Elon Musk tog tir -
 Augmenting microgrid-teknologi:En ny måde for pålidelig strømKredit:CC0 Public Domain En gruppe amerikanske og kinesiske forskere har designet og testet et mikronetsystem, der er både robust og pålideligt – og derfor i stand til at levere energi sikkert og
Augmenting microgrid-teknologi:En ny måde for pålidelig strømKredit:CC0 Public Domain En gruppe amerikanske og kinesiske forskere har designet og testet et mikronetsystem, der er både robust og pålideligt – og derfor i stand til at levere energi sikkert og -
 Data mining -bindestreg overskrifter:Forbedring af navngivet enhedsgenkendelseKredit:CC0 Public Domain Data mining og ekstraktion af viden fra forskellige kilder er big data, stor virksomhed. Men, hvordan klarer søgesoftwaren de enheder, der er nævnt, hvor kun en del af der
Data mining -bindestreg overskrifter:Forbedring af navngivet enhedsgenkendelseKredit:CC0 Public Domain Data mining og ekstraktion af viden fra forskellige kilder er big data, stor virksomhed. Men, hvordan klarer søgesoftwaren de enheder, der er nævnt, hvor kun en del af der -
 Beskyttelse af elnettet mod cyberangrebKredit:CC0 Public Domain Efterhånden som det nationale elnet bliver mere og mere afhængigt af computere og datadeling - hvilket giver betydelige fordele for forsyningsselskaber, kunder, og samfund
Beskyttelse af elnettet mod cyberangrebKredit:CC0 Public Domain Efterhånden som det nationale elnet bliver mere og mere afhængigt af computere og datadeling - hvilket giver betydelige fordele for forsyningsselskaber, kunder, og samfund
- Hvordan Brunelleschi byggede verdens største kupler
- Virus tvungne skoler online, men mange elever fulgte ikke med
- Studiet giver et mere komplet billede af den massive asteroide Psyche
- Hvorfor løg får os til at græde (og hvorfor nogle ikke gør det)
- Ny syrefri magnetgenbrugsproces
- Forskere arbejder på et projekt for at udvikle renere forbrænding, vedvarende brændstoffer