


Opbygning af 3D-modeller af ukendte objekter, som de bliver manipuleret af robotter
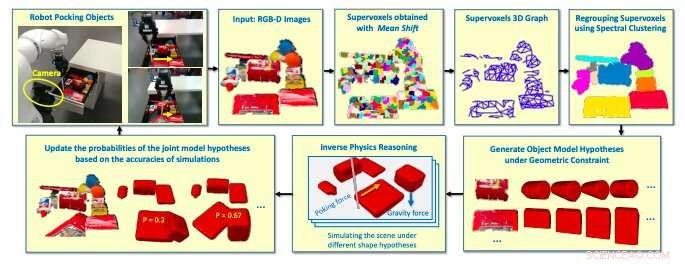
Work-flow af det integrerede system. Kredit:Sang &Boularias.
Forskere ved Rutgers University har for nylig udviklet en probabilistisk tilgang til at bygge 3D-modeller af ukendte objekter, mens de bliver manipuleret af en robot. Deres tilgang, skitseret i et papir, der er forududgivet på arXiv, bruger en fysikmotor til at verificere hypoteseformede geometrier i simuleringer.
De fleste primater lærer naturligvis at manipulere en række genstande i deres tidlige leveår. Replikerer denne tilsyneladende trivielle evne i robotter, imidlertid, har indtil videre vist sig at være meget udfordrende.
Tidligere undersøgelser har forsøgt at opnå dette ved hjælp af en række forskellige manipulationsalgoritmer, som typisk kræver viden om de geometriske modeller, der er forbundet med de objekter, som robotten skal manipulere. Disse modeller kan være nyttige, hvis de objekter, robotten støder på, er kendt på forhånd, alligevel fejler de ofte, når disse objekter er ukendte.
"Vi overvejer specifikt manipulationsopgaver i bunker af rod, der indeholder tidligere usete genstande, " skrev forskerne ved Rutgers University i deres papir. "Et af de nye aspekter af dette arbejde er brugen af en fysikmotor til at verificere hypoteseformede geometrier i simulering. Beviset fra fysiksimuleringer bruges i en sandsynlighedsramme, der forklarer det faktum, at objekternes mekaniske egenskaber er usikre."
Det integrerede system udviklet af forskerne har flere komponenter:en robotmanipulator, et segmenterings- og klyngemodul, og en omvendt fysisk ræsonnement enhed. Robotmanipulatoren er designet til at skubbe eller stikke genstande i en bunke rod, mens segmenterings- og klyngemodulet kan detektere objekter i RGB-D-billeder.
Endelig, den omvendte fysiske ræsonnement enhed, hvilket er det karakteristiske træk ved deres tilgang, udleder manglende dele af objekter ved at afspille robottens handlinger i simulering. I det væsentlige, enheden bruger flere hypoteseformer og tildeler højere sandsynligheder til dem, der bedst matcher de observerede RGB-D-billeder.
Forskerne udviklede en omvendt fysik ræsonnement (IPR) algoritme, der kan udlede okkluderede dele af objekter baseret på deres observerede bevægelser og gensidige interaktioner. For at træne og evaluere deres system, de brugte to datasæt:et Voxlets-datasæt og et nyt datasæt oprettet ved hjælp af YCB-benchmark-objekter. Voxlets-datasættet indeholder statiske billeder af bordpladeobjekter, mens den nye database, der er udarbejdet af dem, indeholder tættere bunker af objekter.
Holdet evaluerede den nye tilgang i en række eksperimenter med en Kuka robotarm monteret på en Clearpath mobil platform og udstyret med et Robotiq hånd- og dybdefølende kamera. I disse tests, robotten blev præsenteret for ukendte objekter i forskellige scenarier. Resultaterne indsamlet af forskerne var meget lovende, med deres IPR-algoritme, der udleder former bedre end andre tilgange.
"Eksperimenter med en robot viser, at denne tilgang er effektiv til at konstruere fysisk realistiske 3-D-modeller, som kan være nyttige til manipulationsplanlægning, " skrev forskerne. "Eksperimenter viser også, at den foreslåede tilgang markant overgår alternative tilgange med hensyn til formnøjagtighed."
Den nye probabilistiske tilgang præsenteret af forskerne kan bidrage til at forbedre ydeevnen af robotter i manipulationsopgaver. I deres fremtidige arbejde, de planlægger at udvikle deres tilgang yderligere, så den kan udlede 3-D og mekaniske modeller samtidigt.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Storbritannien skal bøde Facebook for brud på data (opdatering)I denne tirsdag, 18. april kl. 2017, fil foto, konferencearbejdere taler foran en demo -bod på Facebooks årlige F8 -udviklerkonference, i San Jose, Californien Formanden for Det Forenede Kongeriges me
Storbritannien skal bøde Facebook for brud på data (opdatering)I denne tirsdag, 18. april kl. 2017, fil foto, konferencearbejdere taler foran en demo -bod på Facebooks årlige F8 -udviklerkonference, i San Jose, Californien Formanden for Det Forenede Kongeriges me -
 Amazons digitale assistent Alexa får ny færdighed:hukommelsestabAmazon introducerede kommandoen Alexa, slet alt, hvad jeg sagde i dag, , som får den virtuelle hjælper til at gøre netop det Amazon tilføjede onsdag muligheden for at fortælle sin Alexa digitale a
Amazons digitale assistent Alexa får ny færdighed:hukommelsestabAmazon introducerede kommandoen Alexa, slet alt, hvad jeg sagde i dag, , som får den virtuelle hjælper til at gøre netop det Amazon tilføjede onsdag muligheden for at fortælle sin Alexa digitale a -
 Ny VW-chef Diess sigter mod at styre giganten ud af dieselskyenVolkswagen-koncernens fremtid er nu i hænderne på Herbert Diess Den nye administrerende direktør for Tysklands skandaleramte bilgigant Volkswagen, Herbert Diess, er en tidligere BMW-direktør kendt
Ny VW-chef Diess sigter mod at styre giganten ud af dieselskyenVolkswagen-koncernens fremtid er nu i hænderne på Herbert Diess Den nye administrerende direktør for Tysklands skandaleramte bilgigant Volkswagen, Herbert Diess, er en tidligere BMW-direktør kendt -
 Østrig foreslår at beskatte internetgiganter 5 procent af annonceindtægterneØstrig søger at beskatte fem procent af de digitale annonceindtægter fra internetgiganter som Google og Facebook Østrig foreslog onsdag at beskatte internetgiganter som Google og Facebook for fem
Østrig foreslår at beskatte internetgiganter 5 procent af annonceindtægterneØstrig søger at beskatte fem procent af de digitale annonceindtægter fra internetgiganter som Google og Facebook Østrig foreslog onsdag at beskatte internetgiganter som Google og Facebook for fem