


En første inden for medicinsk robotik:Autonom navigation inde i kroppen
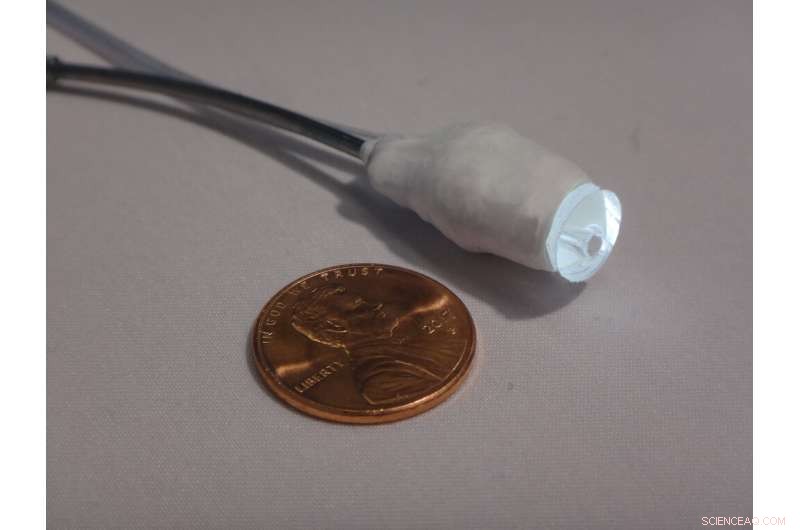
Spidsen af kateteret bestod af en haptisk synssensor lavet af et kamera i millimeterskala og LED indkapslet i silikone. Kredit:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
Bioingeniører på Boston Children's Hospital rapporterer om den første demonstration af en robot, der er i stand til at navigere autonomt inde i kroppen. I en dyremodel af hjerteklapreparation, holdet programmerede et robotkateter til at finde vej langs væggene af et slag, blodfyldt hjerte til en utæt klap - uden en kirurgs vejledning. De rapporterer deres arbejde i dag i Videnskab robotik .
Kirurger har brugt robotter betjent af joysticks i mere end et årti, og hold har vist, at bittesmå robotter kan styres gennem kroppen af eksterne kræfter såsom magnetisme. Imidlertid, seniorforsker Pierre Dupont, Ph.D., chef for Pediatric Cardiac Bioengineering hos Boston Children's, siger, at han ved, dette er den første rapport, der svarer til en selvkørende bil, der navigerer til en ønsket destination inde i kroppen.
Dupont forestiller sig autonome robotter, der hjælper kirurger i komplekse operationer, reducere træthed og frigøre kirurger til at fokusere på de sværeste manøvrer, forbedre resultater.
"Den rigtige måde at tænke på dette er gennem analogien af en jagerpilot og et jagerfly, " siger han. "Jægerflyet påtager sig de rutinemæssige opgaver som at flyve flyet, så piloten kan fokusere på missionens opgaver på højere niveau."
Berøringsstyret syn, informeret af AI
Holdets robotkateter navigerede ved hjælp af en optisk berøringssensor udviklet i Duponts laboratorium, informeret af et kort over hjertets anatomi og præoperative scanninger. Berøringssensoren bruger kunstig intelligens (AI) og billedbehandlingsalgoritmer for at sætte kateteret i stand til at finde ud af, hvor det er i hjertet, og hvor det skal hen.
Til demoen, holdet udførte en meget teknisk krævende procedure kendt som paravalvulær aorta lækage lukning, som reparerer udskiftningshjerteklapper, der er begyndt at lække rundt om kanterne. (Holdet konstruerede sine egne ventiler til eksperimenterne.) Når robotkateteret nåede lækagestedet, en erfaren hjertekirurg tog kontrollen og indsatte en prop for at lukke lækagen.
I gentagne forsøg, robotkateteret lykkedes at navigere til hjerteklaplækager på nogenlunde samme tid som kirurgen (ved hjælp af enten et håndværktøj eller en joystick-styret robot).
-
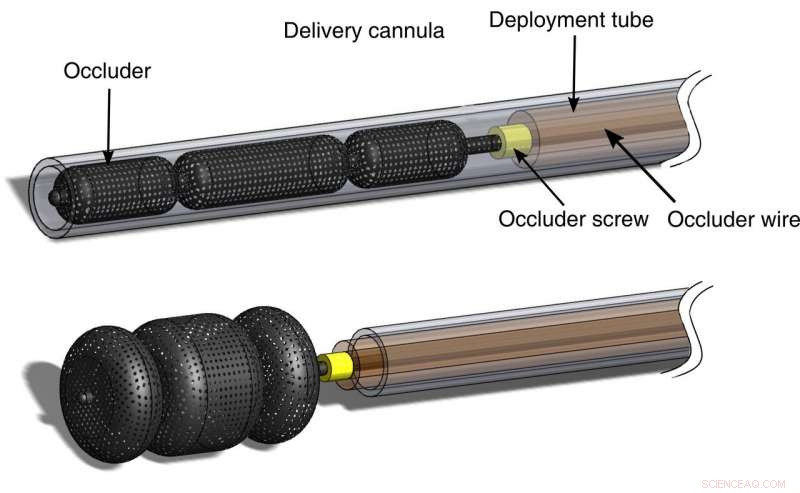
Et diagram over okkluderingssystemet. Kredit:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
-
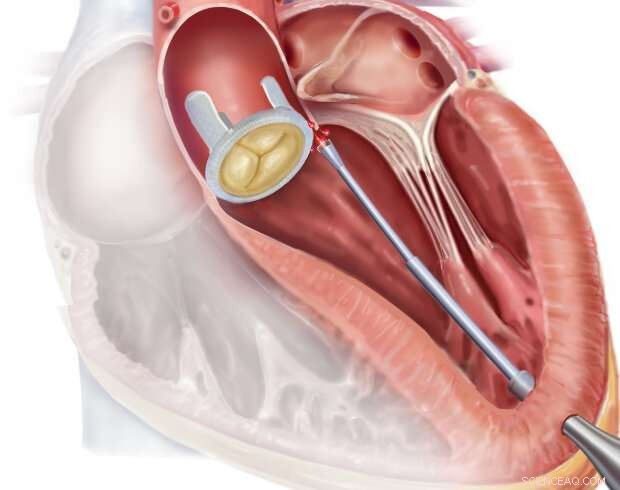
Illustration af robotkateternavigation til stedet for den utætte proteseventil. Kredit:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
-

Kraftsensorværktøj tilsluttet kateteret. Kredit:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
Biologisk inspireret navigation
Gennem en navigationsteknik kaldet "wall following, "Robotkateterets optiske berøringssensor prøvede dets omgivelser med regelmæssige intervaller, på samme måde som insekters antenner eller knurhår fra gnavere prøver deres omgivelser for at bygge mentale kort over ukendte, mørke omgivelser. Sensoren fortalte kateteret, om det rørte blod, hjertevæggen eller en klap (gennem billeder fra et spidsmonteret kamera) og hvor hårdt det pressede (for at forhindre det i at beskadige det bankende hjerte).
Data fra præoperativ billeddannelse og maskinlæringsalgoritmer hjalp kateteret med at fortolke visuelle funktioner. På denne måde robotkateteret fremført af sig selv fra bunden af hjertet, langs venstre ventrikels væg og rundt om den utætte ventil, indtil den nåede lækagens placering.
"Algoritmerne hjælper kateteret med at finde ud af, hvilken type væv det rører ved, hvor det er i hjertet, og hvordan den skal vælge sin næste bevægelse for at nå derhen, hvor vi vil have den hen, " forklarer Dupont.
Selvom den autonome robot tog lidt længere tid end kirurgen om at nå den utætte ventil, dens vægfølgende teknik betød, at den tog den længste vej.
"Navigationstiden var statistisk ækvivalent for alle, hvilket vi synes er ret imponerende i betragtning af, at du er inde i det blodfyldte bankende hjerte og forsøger at nå et millimetermål på en bestemt ventil, " siger Dupont.
Han tilføjer, at robottens evne til at visualisere og fornemme sit miljø kunne eliminere behovet for fluoroskopisk billeddannelse, som typisk bruges i denne operation og udsætter patienter for ioniserende stråling.
En vision om fremtiden?
Dupont siger, at projektet var det mest udfordrende i hans karriere. Mens den hjertekirurgiske fyr, der udførte operationerne på svin, var i stand til at slappe af, mens robotten fandt ventillækage, projektet var belastende for Duponts ingeniørstipendiater, som nogle gange måtte omprogrammere robotten midt i driften, da de perfektionerede teknologien.
"Jeg husker tidspunkter, hvor ingeniørerne på vores hold gik ud af operationsstuen fuldstændig udmattede, men vi formåede at klare det, " siger Dupont. "Nu hvor vi har demonstreret autonom navigation, meget mere er muligt."
Nogle hjerteinterventionalister, som er opmærksomme på Duponts arbejde, forestiller sig at bruge robotter til mere end navigation, udføre rutinemæssige hjertekortlægningsopgaver, for eksempel. Nogle forestiller sig, at denne teknologi giver vejledning i særligt vanskelige eller usædvanlige tilfælde eller hjælper med operationer i dele af verden, der mangler meget erfarne kirurger.
Da Food and Drug Administration begynder at udvikle en lovgivningsramme for AI-aktiverede enheder, Dupont forestiller sig muligheden for, at autonome kirurgiske robotter over hele verden samler deres data for løbende at forbedre ydeevnen over tid - ligesom selvkørende køretøjer i marken sender deres data tilbage til Tesla for at forfine sine algoritmer.
"Dette ville ikke kun udjævne vilkårene, det ville hæve det, " siger Dupont. "Hver kliniker i verden ville arbejde på et niveau af færdigheder og erfaring svarende til det bedste inden for deres felt. Dette har altid været løftet om medicinske robotter. Autonomi kan være det, der bringer os derhen."
 Varme artikler
Varme artikler
-
 Social engineering driver cyberkriminalitet mod virksomhederI denne 27. aug. 2019 foto, Tyler Olson poserer på sit kontor på University of St. Thomas - Minneapolis campus. Olson er lige ved at starte et cybersikkerhedsfirma. (AP Photo/Jim Mone) Den cyberkr
Social engineering driver cyberkriminalitet mod virksomhederI denne 27. aug. 2019 foto, Tyler Olson poserer på sit kontor på University of St. Thomas - Minneapolis campus. Olson er lige ved at starte et cybersikkerhedsfirma. (AP Photo/Jim Mone) Den cyberkr -
 Det amerikanske sundhedsagentur bliver ramt af cyberangreb under COVID-19-responsKredit:CC0 Public Domain US Health and Human Services Department blev udsat for et cyberangreb på sit computersystem søndag aften under nationens reaktion på coronavirus-pandemien, ifølge tre pers
Det amerikanske sundhedsagentur bliver ramt af cyberangreb under COVID-19-responsKredit:CC0 Public Domain US Health and Human Services Department blev udsat for et cyberangreb på sit computersystem søndag aften under nationens reaktion på coronavirus-pandemien, ifølge tre pers -
 Den måde, vi forbruger elektricitet på, har ændret sig dramatisk i de sidste 20 årProsumers er blevet en stor del af elforsyningen i Storbritannien siden 1999. Kredit:Nrqemi/Shutterstock Det er mere end to årtier siden, at Storbritanniens detailmarked for el blev åbnet for fuld
Den måde, vi forbruger elektricitet på, har ændret sig dramatisk i de sidste 20 årProsumers er blevet en stor del af elforsyningen i Storbritannien siden 1999. Kredit:Nrqemi/Shutterstock Det er mere end to årtier siden, at Storbritanniens detailmarked for el blev åbnet for fuld -
 Ny ethanolkonverteringsmetode kan reducere drivhusgasemissionerne mellem 40 og 96 procentKredit:CC0 Public Domain En måde at øge bæredygtigheden på er at reducere kulstofemissionerne inden for transport. I 2017 overgik drivhusgasemissioner (GHG) fra denne sektor alle andre i USA, tegn
Ny ethanolkonverteringsmetode kan reducere drivhusgasemissionerne mellem 40 og 96 procentKredit:CC0 Public Domain En måde at øge bæredygtigheden på er at reducere kulstofemissionerne inden for transport. I 2017 overgik drivhusgasemissioner (GHG) fra denne sektor alle andre i USA, tegn
- Spitzer Telescope afslører den præcise timing af en sort hul-dans
- Mikrobernes rolle i industrien
- Big data synergis af team og åben videnskab
- Mars måne kan være kommet fra påvirkning af hjemmeplaneten, ny undersøgelse tyder på
- Sådan beregnes Antilog
- Tyndt lag germanium kan erstatte silicium i halvledere