


Forskere introducerer et nyt perspektiv inden for robotisk kapacitet
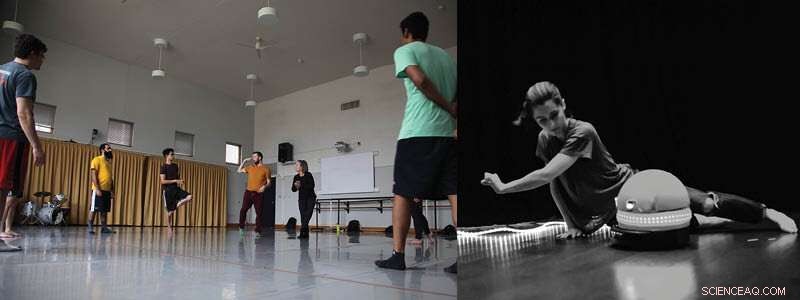
Foto til venstre:Legemliggjort praksis i RAD Lab ledet af Riley Watts (i midten); foto af Catie Cuan. Foto til højre:kunstnerisk praksis i RAD Lab gennem en forestilling af "Time to Compile" på Brown University Kredit:Keira Heu-Jwyn Chang.
University of Illinois -forsker Amy LaViers har introduceret et nyt synspunkt, hvorfra man kan observere robotiske evner i sit papir, "Tæller af mekaniske, Eksterne konfigurationer sammenlignet med computing, Interne konfigurationer i naturlige og kunstige systemer, " offentliggjort i dag i PLOS ONE , et førende tværfagligt forskningstidsskrift.
LaViers leder Robotics, Automatisering, og Dance (RAD) Lab, som har specialiseret sig i udvikling af ekspressive robotsystemer. Typisk, Robotter har til formål at replikere en form for naturlig bevægelse eller handling. I branchemiljøer såsom fremstilling eller lagerbeholdning, robotter yder typisk langt bedre med højere nøjagtighed, præcision, og lavere omkostninger over tid. I mere dynamiske situationer naturlige systemer er mere tilbøjelige til at overgå en robot. Udførelse af kontrollerede opgaver, for eksempel, meget af det, der ses på et lager, let kan kvantificeres, men når det kommer til de mere komplekse situationer, har der ikke været en god måde at gøre det på. LaViers 'papir introducerer en forenklet tællemodel, der giver et numerisk perspektiv til at sammenligne robotter og naturvæseners udtryksmuligheder. Dette er et emne, der udforskes i RAD Lab gennem tværfagligt samarbejde med kunstnere og somatisk praksis.
I databehandling er der mange variabler, der går ind i en enheds kraft, men en almindelig måde at modellere det på bruger antallet af transistorer, som enheden har. Over tid, antallet af transistorer er steget, og det samme er computerkraften, en tendens, der ofte omtales som Moores lov. Der kan drages en parallel til naturlige systemer mellem transistorer, der er "tændt" og "slukket" og en forenklet model af neuroner:"fyring" og "ikke affyring." En sådan transistortælling giver en statisk flaskehals for computerkapacitet, ignorerer dynamiske aspekter af processorhastighed, for eksempel. LaViers bemærkede, at en lignende optælling af statiske eksterne konfigurationer af robotter kunne afsløre tendenser i robotkapacitet. I øvrigt, hun koblede beregning og mekanisering i en robot til interne og eksterne tilstandsændringer, henholdsvis, i en naturlig organisme. Efter at have foretaget disse sammenligninger, LaViers kan direkte sammenligne, hvor ekspressive robotter er med naturlige organismer, som vist i plottet nedenfor.
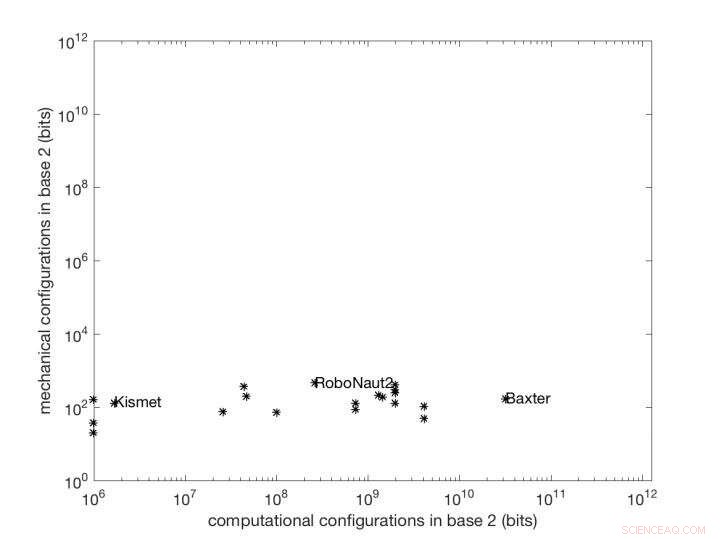
Plot fra LaViers' nyudgivne arbejde:en sammenligning af ændringen i robotters indre vs eksterne kompleksitet over de seneste 15 år. Kredit:University of Illinois Robotics, Automation and Dance (RAD) Lab
Hendes papir fokuserer på to modeller af en mikroskopisk orm (C. Elegans) og adskillige delvise organismeanalyser samt analyser af en række velkendte moderne robotter. En graf over LaViers' resultater viser, at ved hjælp af hendes metode, robotterne udfører mest mellem ormens to modeller for, hvor udtryksfulde de er. Det er, en passende naturlig sammenhæng for ekspressiviteten af eksisterende robotsystemer kan være denne lille orm. Sammenligningerne er ikke perfekte, men de giver en forenkling af et komplekst problem for at forstå det større billede - hvor meget der kan gøres fremskridt inden for robotik i dynamiske situationer.
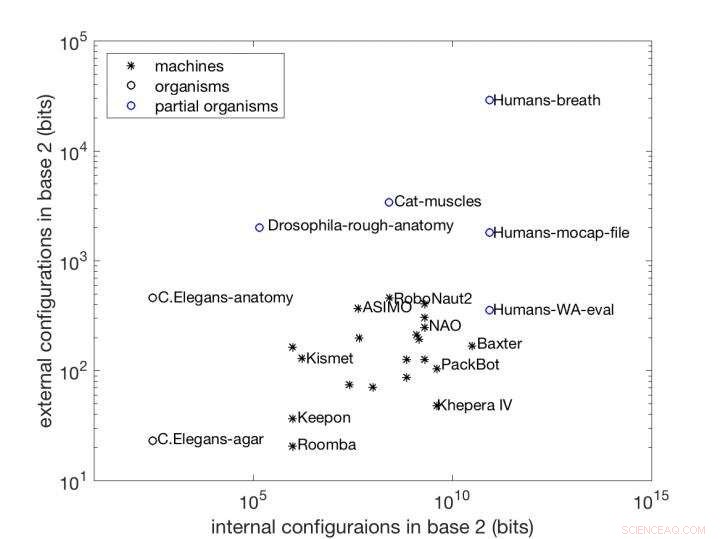
En sammenligning af den samme gruppe af robotter med naturlige systemer. Se publikationen for detaljer. Kredit:University of Illinois Robotics, Automatisering, og Dance (RAD) Lab
Inden for robotteknologi, naturens fordele bliver undertiden overset. LaViers' arbejde kontekstualiserer de fremskridt, robotikere har gjort gennem årene. Robotter er blevet langt mere avancerede, men når det kommer til ægte efterligning af naturen, er der stadig meget at gøre. Det banebrydende aspekt af hendes nuværende arbejde er, at netop denne tællemodel ikke har været brugt før i robotteknologi.
"Det, jeg er stolt af med dette papir, er, at de afslørede tendenser er lidt chokerende for folk - og det har taget lang tid at blive offentliggjort på grund af det, " sagde LaViers. "Anmelderne på dette sted var yderst hjælpsomme med at gøre avisen stærkere. Til sidst, værket peger forhåbentlig på en måde at tænke på kunstige versus naturlige systemer, der kan hjælpe os med at forbedre fejl og robusthed af maskiner i dynamiske miljøer. Det er retningen for det fremtidige arbejde."
 Varme artikler
Varme artikler
-
 Tysk opstart for at tilbyde elektriske lufttaxier inden 2025Lilium, som viste en prototype lufttaxi i slutningen af 2018, siger, at det vil tilbyde priser svarende til almindelige taxier, men det vil være fire gange hurtigere Det tyske startfirma Lilium
Tysk opstart for at tilbyde elektriske lufttaxier inden 2025Lilium, som viste en prototype lufttaxi i slutningen af 2018, siger, at det vil tilbyde priser svarende til almindelige taxier, men det vil være fire gange hurtigere Det tyske startfirma Lilium -
 Ny 3-D bioprintingsplatform til mikroplader til konstruktion af muskel- og senevævPostholderindsats til udskrivning af håndvægtformede muskel-senevæv i en 24-brønds plade (til venstre ovenfor:postholder, lige ovenfor:postholder i 24-brønds plade [set ovenfra], bund:bioprintet muske
Ny 3-D bioprintingsplatform til mikroplader til konstruktion af muskel- og senevævPostholderindsats til udskrivning af håndvægtformede muskel-senevæv i en 24-brønds plade (til venstre ovenfor:postholder, lige ovenfor:postholder i 24-brønds plade [set ovenfra], bund:bioprintet muske -
 Momentum vokser for en digital vagthund til at regulere teknologigiganterMed Big Tech anklaget for alt fra decimerende industrier til misbrug af privatlivets fred, opfordringer vokser til oprettelse af en føderal regulator. Præsidentkandidater, forbrugerforkæmpere og nogl
Momentum vokser for en digital vagthund til at regulere teknologigiganterMed Big Tech anklaget for alt fra decimerende industrier til misbrug af privatlivets fred, opfordringer vokser til oprettelse af en føderal regulator. Præsidentkandidater, forbrugerforkæmpere og nogl -
 Det gode og det dårlige ved placeringssporingKredit:CC0 Public Domain To nylige nyheder om mobiltelefonplaceringstjenester fangede mig for nylig. Den ene var en positiv udvikling og den anden ret negativ, indtil det i det mindste delvist ble
Det gode og det dårlige ved placeringssporingKredit:CC0 Public Domain To nylige nyheder om mobiltelefonplaceringstjenester fangede mig for nylig. Den ene var en positiv udvikling og den anden ret negativ, indtil det i det mindste delvist ble
- Kemiske sporstoffer løsner naturligt fra landbrugets metan-emissioner
- At komme til nul:Byen i Japan forsøger at genbruge alt sit affald
- Virkningerne af torden og lynet på mennesker & natur
- NASA fortsætter med at studere pulsarer, 50 år efter deres tilfældige opdagelse
- Se:Sparklers kemi forklaret i slowmotion-video
- Gør en håndholdt smartphone til et fluorescensmikroskop