


Brug af en simuleringsramme til at studere rygsøjlens adfærd for firbenede robotter
Kredit:Bhattacharya et al.
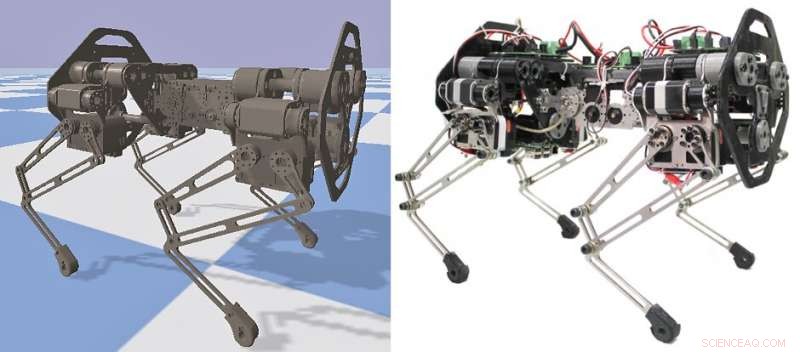
Forskere ved Robert Bosch-centeret for cyberfysiske systemer i Bangalore, Indien, har for nylig foreslået en simuleringsramme for systematisk at studere virkningerne af rygmarvsleddets aktivering på bevægelsesevnen af firbenede robotter. I deres undersøgelse, skitseret i et papir, der er forududgivet på arXiv, de brugte denne ramme til at undersøge rygsøjlens adfærd af en firbenet robot kaldet Stoch 2 og deres indvirkning på dens afgrænsende ydeevne.
"Denne forskning blev til, mens vi udforskede grundlaget for hurtig bevægelse i firbenede dyr og robotter, Shounak Bhattacharya, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Det har været velkendt i nogen tid nu, at små og mellemstore firbenede dyr bruger fleksibiliteten i deres rygsøjle til at forbedre deres bevægelseshastighed og energieffektivitet. Denne brug af fleksibilitet inspirerede robotister til at udforske konceptet mere detaljeret for at finde en løsning til dette problem ved hjælp af de tilgængelige matematiske værktøjer."
I modsætning til tidligere forskere, Bhattacharya og hans kolleger satte sig for at undersøge rygsøjlens adfærd for firbenede robotter ved hjælp af maskinlæringsteknikker. Hovedformålet med deres undersøgelse var at bruge deep reinforcement learning (D-RL) til at realisere den komplekse koordination mellem rygsøjlen og benene i robotter.
"I en D-RL-ramme, at lære fra bunden kan føre til bedre og robuste politikker end at inkorporere menneskelig vejledning, " sagde Bhattacharya. "Men, læring fra bunden involverer flere indledende fejl før genereringen af en fungerende politik. I dette arbejde, over 2 millioner trin var påkrævet, før en aktiv og brugbar politik blev opnået."
At udføre mange forsøg direkte på en robots hardware kræver en stor mængde tid og ressourcer. Forskerne besluttede derfor at simulere robotten og dens miljø i PyBullet, et python-modul, der forbedrer Bullet-fysikmotoren med robotteknologi og maskinlæringsfunktioner. I deres undersøgelse, de brugte PyBullet til at evaluere virkningerne af aktivering af rygmarvsled på den afgrænsende ydeevne af Stoch 2, en 16-DOF firkantet robot med rygrad.
"Vi trænede robotmodellen i dette miljø og observerede, at læringsalgoritmen udførte en komplet træning på 4 timer, når den udføres i maksimalt 10 millioner trin, på en pc drevet af en Intel Core i7 ved 3,5 GHz med 12 kerner, og 32 GB RAM, "Bhattacharya sagde. "Brugen af en simuleringsramme reducerede tiden pr. træning og fjernede nødvendigheden af at eksperimentere med hardwaren."
Bruger PyBullet som en læringsramme for deres robot, forskerne opnåede meget lovende resultater. De fund, de indsamlede under simuleringer, tyder på, at den aktive brug af rygsøjlen gør, faktisk, forbedre en robots skridtlængde og transportomkostninger, samtidig med at den naturlige frekvens reduceres til mere realistiske værdier. Ultimativt, Stoch 2 opnåede en grænsehastighed på 2,1 m/s, med et maksimalt Froude-tal på 2.
Dette studie, overvåget af fire fakultetsmedlemmer ved Indian Institute of Science:Shishir Kolathaya, Ashitava Ghosal, Bharadwaj Amrutur og Shalabh Bhatnagar, er en del af et bredere projekt kaldet Walking Robot. I fremtiden, det kunne inspirere andre forskere til at bruge den samme simuleringsramme til at forbedre deres robotters rygradsadfærd og den deraf følgende bevægelsespræstation.
"Vi opnåede koordinationen af rygsøjlen og benet gennem en D-RL-baseret ramme, hvilket øgede energieffektiviteten og hastigheden af de firbenede, " Bhattacharya sagde. "Det skal bemærkes, at alle disse adfærd blev opnået fra bunden uden nogen forståelse af mekanikken i rygsøjlen. I vores fremtidige arbejde, vi planlægger at implementere det neurale netværk på hardwaren og eksekvere den lærte politik direkte."
© 2019 Science X Network
Sidste artikelÅbn den sorte boks med automatiseret maskinlæring
Næste artikelTop russisk internetfirma angiveligt under pres på data
 Varme artikler
Varme artikler
-
 Reddit åbner Dublin -kontoret i årReddit ekspanderer til Irland-virksomhedens medstifter Alexis Ohanian (C) ses her, inden den ringer på Nasdaq-lukkeklokken fra Nasdaq Entrepreneurial Center den 15. august, 2018 i San Francisco De
Reddit åbner Dublin -kontoret i årReddit ekspanderer til Irland-virksomhedens medstifter Alexis Ohanian (C) ses her, inden den ringer på Nasdaq-lukkeklokken fra Nasdaq Entrepreneurial Center den 15. august, 2018 i San Francisco De -
 Tesla viser fremskridt med selvkørende biler til investorerTesla-chef Elon Musk, afbilledet i marts 2019, vil deltage i præsentationer af den nye teknologi i virksomhedens Silicon Valley hovedkvarter Tesla meddelte onsdag, at det vil give investorer et næ
Tesla viser fremskridt med selvkørende biler til investorerTesla-chef Elon Musk, afbilledet i marts 2019, vil deltage i præsentationer af den nye teknologi i virksomhedens Silicon Valley hovedkvarter Tesla meddelte onsdag, at det vil give investorer et næ -
 Amazon tilføjer Starbucks-direktør Rosalind Brewer til bordI denne 22. august, 2013, Foto, Sams Club President og CEO Rosalind Brewer stiller et spørgsmål under en paneldebat på Wal-Mart US Manufacturing Summit i Orlando, Fla. Amazon siger, at det har navngiv
Amazon tilføjer Starbucks-direktør Rosalind Brewer til bordI denne 22. august, 2013, Foto, Sams Club President og CEO Rosalind Brewer stiller et spørgsmål under en paneldebat på Wal-Mart US Manufacturing Summit i Orlando, Fla. Amazon siger, at det har navngiv -
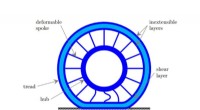 Design af et punkteringsfrit dækIllustration af en ikke-pneumatisk dækstruktur, der viser forskydningslaget. Kredit:University of Illinois i Urbana-Champaign Nogle golfvogne og plæneklippere bruger allerede luftløse dæk, og mind
Design af et punkteringsfrit dækIllustration af en ikke-pneumatisk dækstruktur, der viser forskydningslaget. Kredit:University of Illinois i Urbana-Champaign Nogle golfvogne og plæneklippere bruger allerede luftløse dæk, og mind
- Nyt Zooniverse-projekt - myonjæger
- Algoritme tager måneder, ikke år, at finde materiale til forbedret energiomsætning
- At bygge fremtiden, én robobåd ad gangen
- Nye amerikanske regler vil kræve, at luftfartsselskaber skal fjerne kinesisk udstyr
- Nyt instrument slutter sig til jagten på jordlignende planeter
- Trætyper i sumper