


Foretrækker passagerer selvkørende køretøjer, der køres som maskiner eller som mennesker?

Kredit:University of Warwick
Passagerers og fodgængeres tillid og accept vil være nøglen til fremtiden og udviklingen af autonome køretøjer, så forskere ved WMG ved University of Warwick har netop gennemført og rapporteret et eksperiment for at se, hvilke autonome køretøjers kørestil skabte den højeste grad af tillid blandt autonome køretøjers passagerer — kørsel med fuld maskineffektivitet, eller køre på en måde, der efterligner gennemsnitlig menneskelig kørsel. Det overraskende resultat var, at ingen af dem var optimal, men at en blanding af begge var bedst.
Forskerne tog 43 frivillige med ind i et stort lager, designet til at ligne et fodgængerområde i en bymidte med en række ruter, der omfattede en række vejkryds. Halvdelen fik 4 ture rundt på ruten i et autonomt køretøj, der kørte med fuld maskineffektivitet ved at bruge alle dets evner til at køre på en så sikker og effektiv måde som muligt, mens de andre fik 4 ture rundt på ruten i autonome køretøjer, der forsøgte at efterligne gennemsnittet tæt. menneskelige køremønstre. De scorede derefter niveauet af tillid til de autonome køretøjer. Resultatet er netop blevet offentliggjort i tidsskriftet Information .
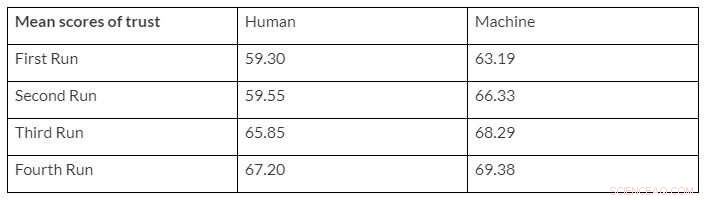
Det overordnede resultat var, at der kun var en marginal forskel i tillid mellem de to kørselsmetoder. Den effektive maskinmetode blev en smule begunstiget, men selv den lille afstand mellem de to kørestile blev mindre over de fire kørsler. Hvad der var bemærkelsesværdigt for både den "maskine" og "menneskelige" kørestil er, at tilliden til begge voksede med hver ny runde, hvilket tyder på, at simpel fortrolighed og tilvænning til oplevelsen vil være en af de mest effektive måder til hurtigt at opbygge tillid og accept af autonome køretøjer, når deres brug bliver mere udbredt.
Kredit:University of Warwick
Dr. Luis Oliveira fra WMG ved University of Warwick og hovedforfatteren på papiret sagde:
"Den overordnede tillid til begge køremetoder voksede for hvert løb. I den maskinlignende kørestil var dette en stabil opadgående kurve gennem de fire ture, men i menneskelignende adfærd var der en særlig stejl ændring opad i scorerne mellem kørsel 2 og 3 Passagererne i eksperimentet erkendte også, at fremtidige generationer kan være mere komfortable med AV'er og dens funktioner, efterhånden som de lærer at leve med den nye teknologi."
Forskerne bad også deltagerne om at fortælle lidt om deres oplevelse, og dette viste, at der var fordele ved begge køremåder, som derfor muligvis skal blandes sammen i enhver fremtidig slutpakke. Forskernes litteraturgennemgang og lagereksperiment gjorde det klart, at der var to særligt klare erfaringer at lære:
- Glat hastighedsændring - Tidligere undersøgelser havde allerede vist, at menneskelige chaufførers tendens er at bremse mest i starten af enhver manøvre, der kræver deceleration, mens de totalt automatiserede køreprogrammer anvender hastighedsændringer mere gradvist og effektivt. Menneskelige passagerer foretrak komforten ved de mere jævne ændringer af acceleration og deceleration, som maskinkøremetoderne gav.
- Skarpe sving – En almindelig klage var en følelse af, at køretøjerne kørte ubehagelige og bekymrende skarpe sving. Denne følelse blev faktisk udtrykt af både dem i maskinens og den menneskelige kørestil, men den var meget mere mærkbar i den maskinlignende kørestilstilstand. En typisk negativ kommentar var "det, du ville forvente af en chauffør, er lidt af et gradvist sving... der var øjeblikke, hvor den accelererede rundt om hjørner, Jeg tror, det fanger dig uvidende."
WMGs Dr. Luis Oliveira sagde:
"Dette viser, at udfordringen er, at hastigheden og banen for autonome køretøjer bør kontrolleres fint, men på samme tid bør køretøjet være selvsikkert for at give fordelene ved automatiseret kørsel."
Det var imidlertid AV'ens adfærd ved kryds i WMG University of Warwicks lagertest, der frembragte de mest forskelligartede og overraskende reaktioner.

Kredit:University of Warwick
De maskindrevne AV'er blev overladt til at gøre brug af alle deres sensorer og evne til at kommunikere med køretøjer, der måtte være ude af syne, for at beslutte, om de skulle køre ind i et vejkryds. Hvis deres sensorer sagde, at det var sikkert, og deres kommunikation med andre køretøjer viste, at der ikke var nogen trusler, ville de blot gå ind i krydset uden at stoppe. Men hvis de opdagede et køretøj, som de mente burde have forkørselsret - selvom det endnu ikke var synligt for den menneskelige passager, ville de stoppe og lade køretøjet passere. I modsætning hertil ville AV'ens efterlignende menneskelige kørsel altid stoppe ved et vejkryds og ville endda kante ind i krydset, som om man kiggede på, hvad den modkørende trafik kunne være.
Reaktionerne på disse to forskellige tilgange var meget forskellige og overraskende.
Nogle kunne lide den menneskelige tilgang med en, der sagde, at AV'en "...sandsynligvis forsøgte at skabe tillid til passageren, Jeg gætter, i forhold til den måde den opførte sig på, lidt ligesom et menneske, det vil kun skabe tillid, jeg tror, det er, fordi det er det, vi er vant til".
Nogle kunne også lide den maskinkørende tilgang med at stoppe ved vejkryds, selvom der ikke var noget synligt problem, men fordi det var i kommunikation med et andet ude af syne køretøj, som det opfattede havde ret til forkørsel. En passage sagde:"den stoppede ved et vejkryds, fordi jeg antager, at den vidste, at der var noget på vej, i modsætning til at den reagerer på at se noget komme”.
Ligeså var der uvilje for begge de menneskelige og maskinelle kørselsmetoder til at håndtere et kryds.
Nogle opfattede problemer med den maskinelle tilgang med bare at komme ind i krydset, hvis de mente, at det var tydeligt at gøre det med én, der sagde, at de var bekymrede for sårbare trafikanter. "..såsom fodgængere eller cyklister, der kunne have været der, som ikke kommunikerer med poden. Det kan være en mere sikker måde at gøre det på i stedet for at flyve rundt om hjørnet".
Andre var dog meget overraskede over den "menneskelige" køremetode AV, der stoppede ved hvert vejkryds, da de så det ikke bare som spild af maskinens muligheder for at scanne og kommunikere forud for at forstå trafikken. De var frustrerede over, at køretøjet ikke var "mere selvsikker" En passager sagde "nogle gange havde jeg ikke forventet, at det ville stoppe, fordi jeg troede, at den anden pod var lidt længere væk, men så gjorde den det, så jeg tror, det er forsigtigt...hvis jeg kørte, var jeg nok gået." En anden passager sagde:"Hvis jeg var i en autonom pod med sensorer, der til enhver tid gav en 360-graders udsigt, Jeg ville forvente, at køretøjet øjeblikkeligt vidste, om det var sikkert eller ej, og behøver ikke at gå ud".
En yderligere passager, der testede den menneskelignende version, kommenterede, at en maskine, der kørte som et menneske og prøvede at kigge rundt om hjørnerne, virkede ironisk unaturligt og sagde:"Jeg synes, det var lidt uventet, fordi min forventning med bælgerne er, at der ville være noget unaturalisme i den snarere end et menneske. chauffør".
På trods af denne tilsyneladende masse af modsætninger i synspunkter om, hvordan AV'er skal håndtere knudepunkter, mener forskerholdet, at der er værdifulde erfaringer at lære selv her. I særdeleshed:
- Der er helt klart behov for at give offentligheden detaljerne i køresystemerne, for eksempel, de seneste teknologiske funktioner såsom køretøj til køretøj kommunikation
- For passagerer i et køretøj bør det overvejes at have et display og/eller lydinformation, der deler nogle af de oplysninger, køretøjet bruger, så brugerne kan forstå, at systemet er opmærksom på farer uden for synsfeltet.
- Der kan være en vis fordel i at præsentere de fulde fordele ved de mest effektive metoder til maskinbaseret kørsel gradvist, når massebrug først introduceres, så passagerer kan opbygge tillid over tid
 Varme artikler
Varme artikler
-
 Teknologigruppen letter holdningen til Huawei, da Beijing slår tilbageI denne 20. maj 2019, Foto, en kvinde justerer brillerne på en mand uden for en Huawei-butik i Beijing. Verdens største sammenslutning af teknologiprofessionelle har omgjort en beslutning, der ville h
Teknologigruppen letter holdningen til Huawei, da Beijing slår tilbageI denne 20. maj 2019, Foto, en kvinde justerer brillerne på en mand uden for en Huawei-butik i Beijing. Verdens største sammenslutning af teknologiprofessionelle har omgjort en beslutning, der ville h -
 Hackere kunne bruge tilsluttede biler til at låse hele byerFaktisk gridlock på Manhattan i 2007. Kredit:Rgoogin på den engelske Wikipedia [CC BY-SA 3.0 (http://creativecommons.org/licenses/by-sa/3.0/) I år 2026, i myldretiden, din selvkørende bil lukker b
Hackere kunne bruge tilsluttede biler til at låse hele byerFaktisk gridlock på Manhattan i 2007. Kredit:Rgoogin på den engelske Wikipedia [CC BY-SA 3.0 (http://creativecommons.org/licenses/by-sa/3.0/) I år 2026, i myldretiden, din selvkørende bil lukker b -
 Google Authenticator-app, der er modtagelig for malwareangrebNy forskning viser, at Google Authenticator-appen på Android-enheder er sårbar over for en form for malware kendt som Cerberus. Ifølge finansiel cybersikkerhedsspecialist ThreatFabric, denne banktroja
Google Authenticator-app, der er modtagelig for malwareangrebNy forskning viser, at Google Authenticator-appen på Android-enheder er sårbar over for en form for malware kendt som Cerberus. Ifølge finansiel cybersikkerhedsspecialist ThreatFabric, denne banktroja -
 Metan er en potent drivhusgas. Kunne konvertere det til CO2 bekæmpe klimaændringer?Kugle og pind model af metan. Kredit:Ben Mills/Public Domain Som regel, at vælge mellem det mindste af to onder er en dyster beslutning. Men nogle gange, det er en mulighed. Et eksempel:At omdann
Metan er en potent drivhusgas. Kunne konvertere det til CO2 bekæmpe klimaændringer?Kugle og pind model af metan. Kredit:Ben Mills/Public Domain Som regel, at vælge mellem det mindste af to onder er en dyster beslutning. Men nogle gange, det er en mulighed. Et eksempel:At omdann
- Afklaring af kompleksiteten af luftforurening i verdens koldeste hovedstad
- Shakespeare:forskning blæser stereotyper væk og afslører, at teenagere faktisk elsker Bard
- Hawaii-tørke under El Niño-vinteren? Ikke altid, ifølge ny forskning
- Slankt teleskop gør det i Big Apple
- Sådan laver du Walkie Talkie med blik og en String
- Aboriginale artefakter afslører de første gamle undervandskultursteder i Australien