


Springende rumrobot flyver som et rumfartøj

At spille Pong med videospil klassiske SpaceBok. For at simulere asteroidernes forsvindende lave tyngdekraft, SpaceBok-teamet brugte det fladeste gulv i Holland – et 4,8 x 9 m epoxygulv glattet til en samlet planhed inden for 0,8 mm, kaldet Orbital Robotics Bench for Integrated Technology (ORBIT), del af ESA’s Orbital Robotics and Guidance Navigation and Control Laboratory. SpaceBok blev placeret på siden, derefter fastgjort til en fritflydende platform for at gengive nul-G-forhold i to dimensioner. Når det hoppede ned fra en væg, lod dets reaktionshjul det dreje rundt midt i springet, lod den lande fødderne først igen på den anden side af kammeret - som om den hoppede langs en nedskaleret enkelt lavtyngdekraftsoverflade. Kredit:ETH Zürich/ZHAW Zürich
Astronauter på Månen befandt sig i at hoppe rundt, frem for blot at gå. Schweiz' SpaceBok planetariske udforskningsrobot har fulgt deres eksempel, lancerer alle fire ben fra jorden under test i ESA's tekniske hjerte.
SpaceBok er en firbenet robot designet og bygget af et schweizisk elevhold fra ETH Zürich og ZHAW Zürich. Det bliver i øjeblikket testet ved hjælp af robotfaciliteter på ESA's tekniske center ESTEC i Holland.
Arbejdet foregår under ledelse af ph.d. studerende Hendrik Kolvenbach fra ETH Zürichs Robotic Systems Lab, i øjeblikket baseret på ESTEC. Robotten bliver brugt til at undersøge potentialet ved "dynamisk gang" for at komme rundt i miljøer med lav tyngdekraft.
Hendrik forklarer:"I stedet for statisk gang, hvor mindst tre ben hele tiden forbliver på jorden, dynamisk gang giver mulighed for gangarter med fulde flyvefaser, hvor alle ben holder sig fra jorden. Dyr gør brug af dynamiske gangarter på grund af deres effektivitet, men indtil for nylig, den beregningskraft og de algoritmer, der kræves til kontrol, gjorde det udfordrende at realisere dem på robotter.
"For miljøer med lavere tyngdekraft på Månen, Mars eller asteroider, at hoppe fra jorden på denne måde viser sig at være en meget effektiv måde at komme rundt på."
"Astronauter, der bevægede sig i Månens en sjettedel af tyngdekraften, adopterede spring instinktivt. SpaceBok kunne potentielt gå op til 2 m høj i månens tyngdekraft, selvom en sådan højde giver nye udfordringer. Når den først kommer op af jorden, skal robotten med ben stabilisere sig selv for at komme sikkert ned igen - den opfører sig grundlæggende som et mini-rumfartøj på dette tidspunkt, " siger teammedlem Alexander Dietsche.
"Så det, vi har gjort, er at udnytte en af de metoder, en konventionel satellit bruger til at styre sin orientering, kaldet et reaktionshjul. Den kan accelereres og decelereres for at udløse en lige og modsat reaktion i selve SpaceBok, " forklarer teammedlem Philip Arm.
"Desuden SpaceBoks ben har fjedre til at lagre energi under landing og frigive den ved start, betydeligt reducere den energi, der er nødvendig for at opnå disse spring, " tilføjer et andet teammedlem, Benjamin Sun.
Holdet øger langsomt højden af robottens gentagne hop, op til 1,3 meter i simulerede månens tyngdekraftsforhold indtil videre.
Testrigge er blevet sat op til at simulere forskellige tyngdekraftsmiljøer, efterligner ikke kun måneforholdene, men også asteroidernes meget lave tyngdekraft. Jo lavere tyngdekraften er, jo længere kan flyvefasen være for hvert robotspring. men effektiv kontrol er nødvendig for både start og landing.
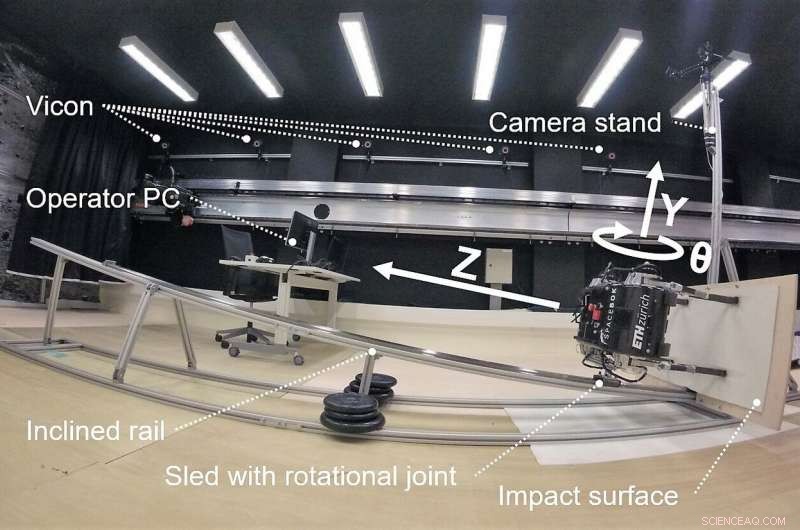
Testrigge til SpaceBok er blevet sat op til at simulere forskellige tyngdekraftsmiljøer, efterligner ikke kun måneforholdene, men også asteroidernes meget lave tyngdekraft. Jo lavere tyngdekraften er, jo længere kan flyvefasen være for hvert robotspring. men effektiv kontrol er nødvendig for både start og landing. Kredit:ETH Zürich/ZHAW Zürich
SpaceBok er en firbenet robot designet og bygget af et schweizisk elevteam fra ETH Zürich og ZHAW Zürich. Det bliver i øjeblikket testet ved hjælp af robotfaciliteter på ESAs tekniske center ESTEC i Holland. Robotten bliver brugt til at undersøge potentialet ved 'dynamisk gang' for at komme rundt i miljøer med lav tyngdekraft. Testrigge er blevet sat op til at simulere forskellige tyngdekraftsmiljøer. SpaceBok kan potentielt blive op til 2 m høj i månens tyngdekraft, selvom en sådan højde kræver, at robotten stabiliserer sig selv med et reaktionshjul, der kommer sikkert ned igen. Kredit:ETH Zürich/ZHAW Zürich
SpaceBok monteret sideværts på en fritsvævende luftlejeplatform. For at simulere asteroidernes forsvindende lave tyngdekraft, SpaceBok-teamet brugte det fladeste gulv i Holland – et 4,8 x 9 m epoxygulv glattet til en samlet planhed inden for 0,8 mm, kaldet Orbital Robotics Bench for Integrated Technology (ORBIT), del af ESA’s Orbital Robotics and Guidance Navigation and Control Laboratory. SpaceBok blev placeret på siden, derefter fastgjort til en fritflydende platform for at gengive nul-G-forhold i to dimensioner. Når det hoppede ned fra en væg, lod dets reaktionshjul det dreje rundt midt i springet, lod den lande fødderne først igen på den anden side af kammeret - som om den hoppede langs en nedskaleret enkelt lavtyngdekraftsoverflade. Kredit:ETH Zürich/ZHAW Zürich 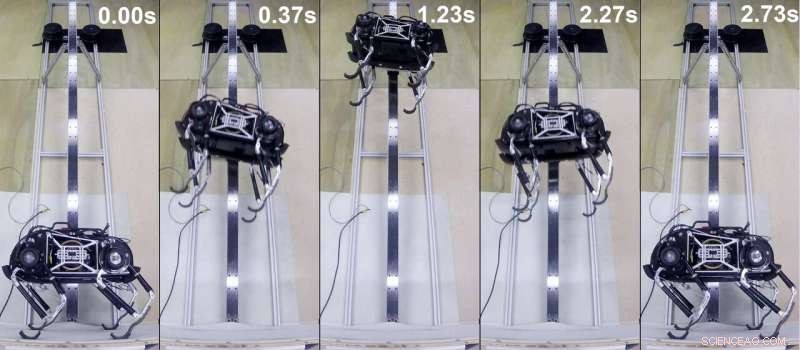
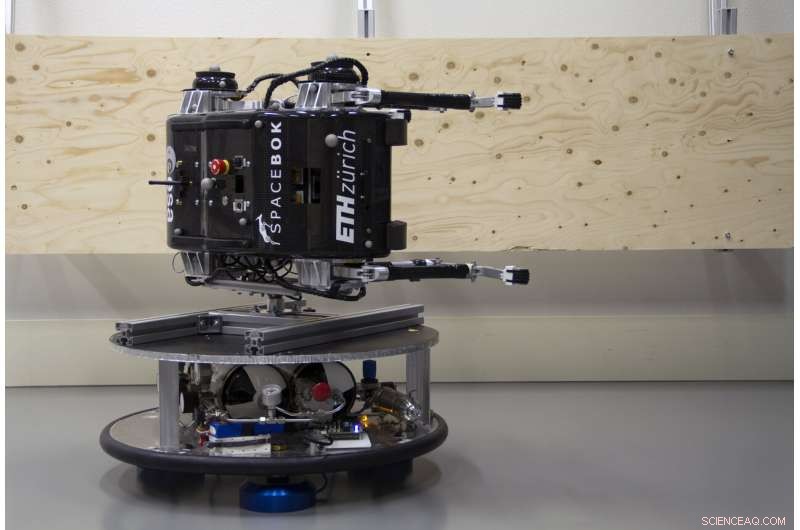
SpaceBok blev placeret på siden, derefter fastgjort til en fritflydende platform for at gengive nul-G-forhold i to dimensioner. Når det hoppede ned fra en væg, lod dets reaktionshjul det dreje rundt midt i springet, lod den lande fødderne først igen på den anden side af kammeret - som om den hoppede langs en nedskaleret enkelt lavtyngdekraftsoverflade.
Hendrik tilføjede:"Testen gik så godt, at vi endda brugte SpaceBok til at spille et live-action spil Pong, videospilsklassikeren."
Testning vil fortsætte under mere realistiske forhold, med hop lavet over forhindringer, bakket terræn, og realistisk jord, til sidst at flytte ud af dørene.
Hendrik studerer på ESTEC gennem ESA's Networking Partnering Initiative, beregnet til at udnytte avanceret akademisk forskning til rumapplikationer.
 Varme artikler
Varme artikler
-
 Facebook bruger erodering i USA som sociale medier under presKredit:CC0 Public Domain Facebooks bestræbelser på at slå ned på misinformation og sensationelt indhold har reduceret tiden brugt på det førende sociale netværk til at udhule, sagde forskere tirsd
Facebook bruger erodering i USA som sociale medier under presKredit:CC0 Public Domain Facebooks bestræbelser på at slå ned på misinformation og sensationelt indhold har reduceret tiden brugt på det førende sociale netværk til at udhule, sagde forskere tirsd -
 Fremstillingsprocessen giver lave omkostninger, bæredygtig mulighed for fødevareemballageDette billede viser nanocellulose-belagt PET-film. Forskere fra Purdue University skabte en ny fremstillingsproces ved hjælp af cellulosenanokrystaller som avancerede barrierebelægninger til fødevaree
Fremstillingsprocessen giver lave omkostninger, bæredygtig mulighed for fødevareemballageDette billede viser nanocellulose-belagt PET-film. Forskere fra Purdue University skabte en ny fremstillingsproces ved hjælp af cellulosenanokrystaller som avancerede barrierebelægninger til fødevaree -
 GM lukker canadisk fabrik, bringe 3000 job i fare:rapporterGM har meddelt planer om at reducere arbejdsstyrken i hele Nordamerika for at spare penge ved frivillige afskedigelser General Motors forventes at meddele mandag lukningen af en fabrik i den can
GM lukker canadisk fabrik, bringe 3000 job i fare:rapporterGM har meddelt planer om at reducere arbejdsstyrken i hele Nordamerika for at spare penge ved frivillige afskedigelser General Motors forventes at meddele mandag lukningen af en fabrik i den can -
 Ny enhed muliggør batterifri computerinput ved spidsen af din fingerTip-Tap-teknologi fastgjort til en persons hånd. Kredit:University of Waterloo Dataloger ved University of Waterloo har skabt en enhed til bærbar computerinput, der er egnet til mange situationer,
Ny enhed muliggør batterifri computerinput ved spidsen af din fingerTip-Tap-teknologi fastgjort til en persons hånd. Kredit:University of Waterloo Dataloger ved University of Waterloo har skabt en enhed til bærbar computerinput, der er egnet til mange situationer,
- EPA vil afholde flere høringer om den planlagte ophævelse af Clean Power Plan
- Fly aflyst, da sandstorm opsluger Sudans hovedstad
- Sådan beregnes en to-halet test
- Forskere bruger RFID -chips til at spore biologiske prøver
- Storme Alpha og Beta opkaldt efter det græske alfabet, anden gang nogensinde
- Spansk forbrugergruppe vil sagsøge Facebook for datadeling