


Nyt filter forbedrer robottens syn ved 6-D positur-estimering

Oversigt over PoseRBPF-rammen til 6D-objektpositionssporing. Metoden udnytter et Rao-Blackwellized partikelfilter og et auto-encoder-netværk til at estimere 3D-translationen og en fuld fordeling af 3D-rotationen af et målobjekt fra en videosekvens. Kredit:University of Illinois i Urbana-Champaign
Robotter er gode til at lave identiske gentagne bevægelser, såsom en simpel opgave på et samlebånd. (Tag en kop op. Vend den om. Læg den fra dig.) Men de mangler evnen til at opfatte genstande, når de bevæger sig gennem et miljø. (Et menneske tager en kop, lægger det ned et tilfældigt sted, og robotten skal hente den.) En nylig undersøgelse blev udført af forskere ved University of Illinois i Urbana-Champaign, NVIDIA, University of Washington, og Stanford University, på 6D objektposeringsestimering for at udvikle et filter for at give robotter større rumlig perception, så de kan manipulere objekter og navigere gennem rummet mere præcist.
Mens 3-D positur giver placeringsoplysninger på X, Y, og Z-akser – relativ placering af objektet i forhold til kameraet – 6D-positur giver et meget mere komplet billede. "Ligesom at beskrive et fly under flyvning, robotten skal også kende de tre dimensioner af objektets orientering - dens krøjning, tonehøjde, og rulle, " sagde Xinke Deng, ph.d.-studerende, der studerer med Timothy Bretl, en lektor i Afd. for Luftfartsteknik ved U of I.
Og i virkelige miljøer, alle seks af disse dimensioner ændrer sig konstant.
"Vi vil have en robot til at blive ved med at spore et objekt, når det bevæger sig fra et sted til et andet, " sagde Deng.
Deng forklarede, at arbejdet blev gjort for at forbedre computersynet. Han og hans kolleger udviklede et filter til at hjælpe robotter med at analysere rumlige data. Filteret ser på hver partikel, eller et stykke billedinformation indsamlet af kameraer rettet mod et objekt for at hjælpe med at reducere bedømmelsesfejl.
"I en billedbaseret 6D-poseestimeringsramme, et partikelfilter bruger en masse prøver til at estimere positionen og orienteringen, " sagde Deng. "Hver partikel er som en hypotese, et gæt om den position og orientering, som vi ønsker at vurdere. Partikelfilteret bruger observation til at beregne værdien af vigtigheden af informationen fra de andre partikler. Filteret eliminerer de forkerte skøn.
"Vores program kan estimere ikke bare en enkelt stilling, men også usikkerhedsfordelingen af et objekts orientering, " sagde Deng. "Tidligere, der har ikke været et system til at estimere den fulde fordeling af objektets orientering. Dette giver vigtige usikkerhedsoplysninger for robotmanipulation."
Oversigt over PoseRBPF-rammen til 6D-objektpositionssporing. Metoden udnytter et Rao-Blackwellized partikelfilter og et auto-encoder-netværk til at estimere 3D-translationen og en fuld fordeling af 3D-rotationen af et målobjekt fra en videosekvens. Kredit:University of Illinois Department of Aeropsace Engineering
Undersøgelsen bruger 6D objektpositionssporing i Rao-Blackwellized partikelfiltreringsramme, hvor 3D-rotationen og 3D-translationen af et objekt er adskilt. Dette gør det muligt for forskernes tilgang, kaldet PoseRBPF, til effektivt at estimere 3D-translationen af et objekt sammen med den fulde fordeling over 3D-rotationen. Som resultat, PoseRBPF kan spore objekter med vilkårlige symmetrier, mens de stadig opretholder passende posteriore fordelinger.
"Vores tilgang opnår state-of-the-art resultater på to 6D positur estimering benchmarks, " sagde Deng.
Studiet, "PoseRBPF:Et Rao-blackwellized partikelfilter til 6D objektpositionsvurdering, " blev præsenteret på Robotics Science and Systems Conference i Freiburg, Tyskland. Det er skrevet af Xinke Deng, Arsala Mousavian, Yu Xiang, Fei Xia, Timothy Bretl, og Dieter Fox.
 Varme artikler
Varme artikler
-
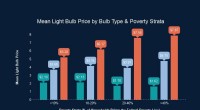 Energiuretfærdighed? Koste, tilgængeligheden af energieffektive pærer varierer med fattigdomsni…Energieffektive pærer er dyrere og mindre tilgængelige i byer med høj fattigdom end på mere velhavende steder, ifølge en ny University of Michigan-undersøgelse udført i Wayne County. Kredit:Tony Reame
Energiuretfærdighed? Koste, tilgængeligheden af energieffektive pærer varierer med fattigdomsni…Energieffektive pærer er dyrere og mindre tilgængelige i byer med høj fattigdom end på mere velhavende steder, ifølge en ny University of Michigan-undersøgelse udført i Wayne County. Kredit:Tony Reame -
 AI er endnu ikke smart nok til at redde os fra falske nyheder:Facebook -brugere (og deres bias) er n…På egen hånd, menneskelig dømmekraft kan være subjektiv og skæv i forhold til personlige skævheder. De oplysninger, vi støder på online hver dag, kan være vildledende, ufuldstændig eller fremstill
AI er endnu ikke smart nok til at redde os fra falske nyheder:Facebook -brugere (og deres bias) er n…På egen hånd, menneskelig dømmekraft kan være subjektiv og skæv i forhold til personlige skævheder. De oplysninger, vi støder på online hver dag, kan være vildledende, ufuldstændig eller fremstill -
 Siemens, Alstom rejser tvivl om megafusionAldrig vil de to mødes? Tilliden til, at den politisk følsomme fusion af deres jernbanevirksomheder ville blive vinket igennem af Europa-Kommissionen, ebbede af hos både Siemens og Alstom torsdag.
Siemens, Alstom rejser tvivl om megafusionAldrig vil de to mødes? Tilliden til, at den politisk følsomme fusion af deres jernbanevirksomheder ville blive vinket igennem af Europa-Kommissionen, ebbede af hos både Siemens og Alstom torsdag. -
 Store teknologivirksomheder fjerner Alex Jones for had, mobning (Opdatering)I denne tirsdag, 19 juli, 2016 filbillede, Alex Jones, midt til højre, bliver eskorteret af politiet ud af en flok demonstranter uden for det republikanske konvent i Cleveland. Facebook siger, at det
Store teknologivirksomheder fjerner Alex Jones for had, mobning (Opdatering)I denne tirsdag, 19 juli, 2016 filbillede, Alex Jones, midt til højre, bliver eskorteret af politiet ud af en flok demonstranter uden for det republikanske konvent i Cleveland. Facebook siger, at det
- Spildevandsbehandling til en tredjedel af størrelsen og omkostningerne
- Hadforbrydelser mod LGBT+-personer i udsatte områder ignoreres
- Vil Kinas månelanding starte et nyt rumkapløb?
- Misforståelser om racemæssig økonomisk fremgang er gennemgående
- Saguaro -kaktus er et ikonisk symbol på det amerikanske sydvest
- Et genomisk bud på geobiologi