


En teknik til at forbedre fysisk interaktion i luftrobotter
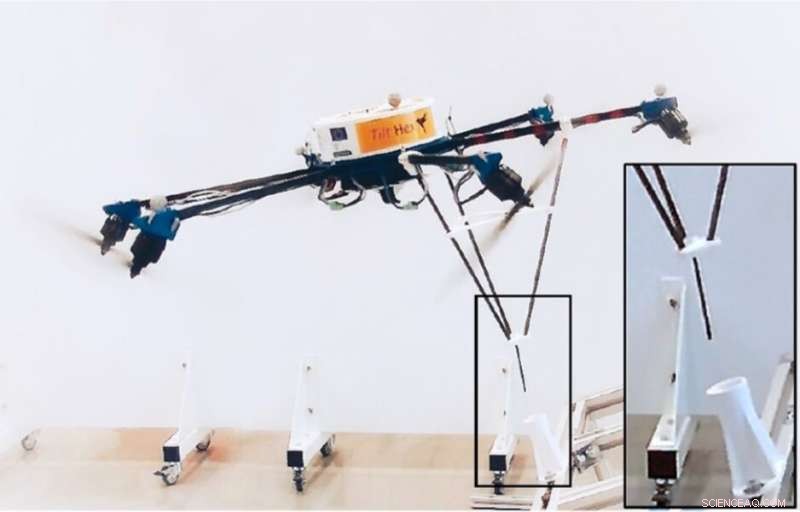
Tilt-Hex (NCFTP-antenneplatform med vippede propeller udviklet hos LAAS-CNRS) med den stift fastgjorte sluteffektor. Bemærk, hvordan interaktionen foregår langt væk og off-centreret fra køretøjets CoM. Kredit:Ryll et al.
I de seneste år, luftrobotter er blevet mere og mere populære, med potentielle anvendelser inden for en række områder. Mange af disse robotter er primært designet til at flyve rundt og indsamle visuelle data fra deres omgivende miljø, men nogle er også i stand til at forstå, bære eller endda samle genstande.
At udstyre luftrobotter med avancerede fysiske interaktionsevner kunne være utrolig nyttigt, da det ville give dem mulighed for at udføre mere komplekse opgaver. Imidlertid, på grund af aerodynamikkens komplekse natur, dette har ofte vist sig meget udfordrende, især når et køretøj er tæt på overflader.
Forskere ved University of Cassino og Southern Lazio, Université de Toulouse og University of Basilicata har for nylig introduceret et nyt paradigme, der muliggør 6-D interaktionskontrol i luftrobotter. Deres tilgang, skitseret i et papir offentliggjort i SAGE's International Journal of Robotics Research , kunne bane vejen for udviklingen af mere effektive luftsystemer, der yder bedre end eksisterende robotter i luftmanipulation og fysiske interaktionsopgaver.
Det nye paradigme foreslået af forskerne, kaldet 6-D flyvende endeeffektor, kan anvendes på de fleste, hvis ikke alle, fuldt aktiverede systemer, der er i stand til at spore en bane i fuld stilling med sluteffektoren. I undersøgelsen, det blev specifikt anvendt på Tilt-Hex, en ny luftrobot, muliggør uafhængig kontrol af dens lineære og vinkelacceleration. Dette gav i sidste ende robotten mulighed for øjeblikkeligt at modvirke enhver skruenøgle, den stødte på, når den interagerer med sit miljø.
"Ved at udnytte dens vippede propelaktivering, robotten er i stand til at kontrollere den fulde 6-D stilling (position og orientering uafhængigt) og til at udøve en fuldnøgle (kraft og moment uafhængigt) med en stift fastgjort endeeffektor, " forklarer forskerne i deres papir. "Interaktion opnås ved hjælp af et adgangskontrolskema, hvor en ydre sløjfekontrol styrer den ønskede adgangsadfærd (dvs. interaktionsoverholdelse/stivhed, dæmpning, og masse) og en indre sløjfe baseret på omvendt dynamik sikrede fuld 6-D posesporing."
Paradigmet udviklet af forskerne estimerer interaktionskræfter ved hjælp af en inertial måleenhed (IMU)-forstærket momentum-baseret observatør. Når den er integreret med kendte robotalgoritmer, kan den opnå skruenøglestimering, samt bevægelses- og interaktionskontrol. Interessant nok, dette "integrerede system" kræver ikke en kraftsensor i sin grundlæggende konfiguration og fungerer selv med en minimal sensorsuite.
Forskerne har evalueret effektiviteten af det 6-D flyvende endeeffektor-paradigme i en række eksperimenter, med fokus på fire casestudier:en hård-touch og glidebane på en træoverflade (dvs. glideoverfladeopgaven), en vippet pind-i-hul opgave, et adgangsformende eksperiment, og en opgave i nærvær af tidsvarierende interaktionskræfter. Disse evalueringer gav meget lovende resultater, demonstrerer tilgangens alsidighed og robusthed, selv i nærvær af miljømæssige usikkerheder.
I øvrigt, det nye paradigme viste sig at udkonkurrere andre teknikker til luftmanipulation i sine evner, såvel som i dens pålidelighed, kompleksitet og omkostninger. Det kunne således hjælpe med udviklingen af mere avancerede luftsystemer, der klarer sig bedre i manipulations- og fysiske interaktionsopgaver.
"I fremtiden, vi vil søge systemets fulde autonomi ved at erstatte motion capture-systemet med et fuldstændigt indbygget tilstandsestimat, " skriver forskerne i deres papir. vi vil arbejde med differentieringskontaktkræfter på værktøjsspidsen og forstyrrelser på platformen (f.eks. vindstød)."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 En algoritme til at lære robotter at forstå manipulationsstrategier på forhåndKredit:Berscheid, Meissner &Kröger. Når mennesker rækker ud for at gribe en given genstand, de skal ofte skubbe rod af vejen for at isolere det og sikre, at der er plads nok til at samle det op. S
En algoritme til at lære robotter at forstå manipulationsstrategier på forhåndKredit:Berscheid, Meissner &Kröger. Når mennesker rækker ud for at gribe en given genstand, de skal ofte skubbe rod af vejen for at isolere det og sikre, at der er plads nok til at samle det op. S -
 Stop med at spille med black box og modeller, der kan forklares om beslutninger med høje indsatserCynthia Rudin. Kredit:Duke University I takt med at buzzwords machine learning fortsætter med at vokse i popularitet, flere industrier henvender sig til computeralgoritmer for at besvare vigtige s
Stop med at spille med black box og modeller, der kan forklares om beslutninger med høje indsatserCynthia Rudin. Kredit:Duke University I takt med at buzzwords machine learning fortsætter med at vokse i popularitet, flere industrier henvender sig til computeralgoritmer for at besvare vigtige s -
 Døve og hørehæmmede har sværere ved at læse hypertekstKredit:CC0 Public Domain Unge, der er døve eller hørehæmmede, har meget sværere ved at læse end gennemsnittet. Det anslås, at omkring 70 % af denne gruppe kun er semi-litterate i voksenalderen. Ad
Døve og hørehæmmede har sværere ved at læse hypertekstKredit:CC0 Public Domain Unge, der er døve eller hørehæmmede, har meget sværere ved at læse end gennemsnittet. Det anslås, at omkring 70 % af denne gruppe kun er semi-litterate i voksenalderen. Ad -
 CHP kan have brugt Tesla Autopilot til at stoppe hastighedskørselDenne onsdag, 8. august, 2018, filbillede viser Tesla-emblemet på bagenden af en Model S i Teslas showroom i Santa Monica, California Highway Patrol siger, at de kan have brugt autopilotsystemet på
CHP kan have brugt Tesla Autopilot til at stoppe hastighedskørselDenne onsdag, 8. august, 2018, filbillede viser Tesla-emblemet på bagenden af en Model S i Teslas showroom i Santa Monica, California Highway Patrol siger, at de kan have brugt autopilotsystemet på
- Hvordan svovl hjalp med at gøre Jorden beboelig før iltstigningen
- Lunar krater radioteleskop:Oplyser den kosmiske mørke middelalder
- Satellitter kan afsløre risikoen for tvangsarbejde i verdens fiskerflåde
- Elektrisk omskiftelig qubit kan tune mellem lagring og hurtige beregningstilstande
- Sådan konverteres gram til Moles
- 10 måder at fejre Jordens dag på