


Det er ikke nemt at give en robot en følelse af berøring
Følesansen måles generelt af en sensor, der kan omsætte et tryk på den til et lille elektrisk signal. Kredit:Shutterstock
Vi har robotter, der kan gå, se, tale og høre, og manipulere objekter i deres robothænder. Der er endda en robot, der kan lugte.
Men hvad med følesansen? Dette er lettere sagt end gjort, og der er begrænsninger for nogle af de nuværende metoder, der ses på, men vi er ved at udvikle en ny teknik, der kan overvinde nogle af disse problemer.
For mennesker, berøring spiller en afgørende rolle, når vi bevæger vores krop. Røre ved, kombineret med syn, er afgørende for opgaver som at samle genstande op - hårde eller bløde, let eller tung, varm eller kold - uden at beskadige dem.
Inden for robotmanipulation, hvor en robothånd eller -griber skal samle en genstand op, tilføjelse af følesansen kan fjerne usikkerheder i håndteringen af bløde, skrøbelige og deformerbare genstande.
Jagten på smart hud
At kvantificere berøring i tekniske termer kræver ikke kun den præcise viden om mængden af ekstern kraft, der påføres en berøringssensor, men du skal også kende kraftens nøjagtige position, dens vinkel, og hvordan det vil interagere med det objekt, der bliver manipuleret.
Så er der spørgsmålet om, hvor mange af disse sensorer en robot skal bruge. Det er en udfordrende ingeniøropgave at udvikle et robotskin, der kunne indeholde hundredvis eller endda tusindvis af berøringssensorer.
At forstå de fysiske mekanismer for berøringssansning i den biologiske verden giver stor indsigt, når det kommer til at designe den robotiske ækvivalent, en smart hud.
Men en væsentlig barriere for udviklingen af smart hud er den nødvendige elektronik.
Hverdagskraft- og berøringsmåling
Følesansen måles generelt af en sensor, der kan omsætte tryk til et lille elektrisk signal. Når du bruger en digital vægt til at veje dig selv eller måle ingredienser i dit køkken, vægten bruger sandsynligvis en piezoelektrisk transducer.
Dette er en enhed, der forvandler en kraft til elektricitet. Den lille elektriske strøm fra transduceren føres derefter gennem ledninger til en lille mikrochip, der aflæser styrken af strømmen, konverterer det til en meningsfuld vægtmåling, og viser det på en skærm.
På trods af at være i stand til at fornemme forskellige niveauer af kraft, disse elektroniske enheder har flere begrænsninger, der gør det upraktisk for smart hud. I særdeleshed, de har en relativt langsom reaktionstid på kraften.
Der er andre typer berøringssensorer baseret på et materiale, der ændrer dets andre elektriske egenskaber, såsom kapacitans eller modstand. Din mobiltelefons skærm kan have denne teknologi indbygget, og hvis du bruger en pegefelt på din computer, vil den helt sikkert bruge berøringssensorer.
Blød og fleksibel kraftføling
Der er de seneste år sket store fremskridt med at lave berøringssensorer, der kan indlejres i bløde og fleksible materialer. Det er præcis, hvad vi har brug for til smart hud.
Men mange af disse udviklinger mislykkes fuldstændigt (på grund af sensortypen) i nærvær af fugt. (Har du nogensinde prøvet en våd finger på din smartphones touchskærm?)
Medicinske applikationer er nu en hoveddrivkraft bag efterspørgslen efter fleksibel og robust kraftføling. For eksempel, smart hud kunne bruges til at genoprette sensorisk feedback til patienter med hudskade eller perifer neuropati (følelsesløshed eller prikken). Det kan også bruges til at give protetiske hænder grundlæggende berøringsfølende evne.
For nylig, forskere fra MIT og Harvard har udviklet en skalerbar taktil handske og kombineret den med kunstig intelligens. Sensorer ensartet fordelt over hånden kan bruges til at identificere individuelle objekter, estimere deres vægt, og udforsk de typiske taktile mønstre, der dukker op, mens du griber dem.
Forskerne skabte en handske med 548 sensorer samlet på et strikket stof indeholdende en piezoresistiv film (som også reagerer på tryk eller belastning) forbundet med et netværk af ledende trådelektroder.
Dette er det første vellykkede forsøg på at optage sådanne signaler i stor skala, afslører vigtig indsigt, som kan bruges i fremtidigt design af proteser og robotgribeværktøjer.
Men ligesom næsten alle andre berøringsgrænseflader, der er designet med kapacitive, resistive eller piezoelektriske teknikker, denne taktile teknologi fungerer ikke godt med våde fingre eller under vand.
Optisk kraftføling i horisonten
For at løse dette problem, vi har udviklet en ny form for taktil sensor, der bruger nanometertynde film af organiske LED'er (OLED) og organiske fotodioder (OPD) til måling af soft touch.
OLED-teknologi findes normalt i tv- og smartphone-skærme. Vores tilgang til måling af følesansen er baseret på optisk kraftføling.
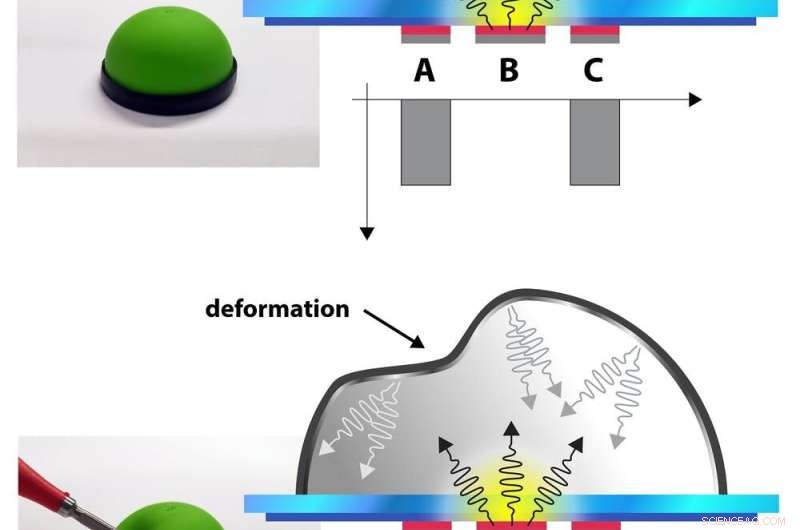
Et enkelt berøringselement, der består af en kuppel over nogle OLED-pixel. Top, når intet rører kuplen, reflekteres en tilsvarende mængde lys fra den lysemitterende pixel B, til lysdetektionspixel A og C. Nederst, når noget rører kuplen, den er deformeret, og mængden af reflekteret lys ændrer sig mellem pixels A og C. Kredit:Ajay Pandey, Forfatter angivet
OLED-elementerne (kaldet dioder eller pixels) er faktisk fuldt reversible. Det betyder, at ud over at kunne producere lys (som i en tv-skærm), disse pixels kan også registrere lys.
Ved at bruge dette princip kan vi fremstille en lille, uigennemsigtig, fleksibel kuppel med en reflekterende belægning, der er placeret over nogle OLED-pixel. Lys, der udsendes fra den centrale pixel, er ensartet fordelt over alle andre pixels under kuplen, hvis kuplen ikke forstyrres.
Men hvis kuplen trykkes - ved at røre ved noget - vil den deformeres, resulterer i en ulige respons fra de pixels, der bruges til at detektere det reflekterede lys. Ved at kombinere svarene fra dusinvis af disse kupler i kontaktområdet vil det være muligt at estimere den kraft, der påføres.
Denne tilgang er et væsentligt skridt i retning af at forenkle det smarte hudlayout til store applikationer, og vi håber, at vi snart vil se robotter, der kan have fuld kropssansning i luften, når det er vådt eller endda under vand.
Denne artikel er genudgivet fra The Conversation under en Creative Commons-licens. Læs den originale artikel. 
Sidste artikelTænker på fremtidig mobilitet og produktionsteknik
Næste artikelHvordan virker lithium-ion-batterier?
 Varme artikler
Varme artikler
-
 Salat have it:Machine learning til cr-optimeringTransplantation af salat på Gs Growers plantagefelt, i nærheden af Ely, Storbritannien. Kredit:Gs Growers På Earlham Institute (EI), kunstig intelligensbaserede teknikker som maskinlæring bevæge
Salat have it:Machine learning til cr-optimeringTransplantation af salat på Gs Growers plantagefelt, i nærheden af Ely, Storbritannien. Kredit:Gs Growers På Earlham Institute (EI), kunstig intelligensbaserede teknikker som maskinlæring bevæge -
 Brugere af ringetelefonkamera skal bruge to-faktor-godkendelse for at beskytte kontiKredit:CC0 Public Domain Brugere af Ring doorbell-sikkerhedskameraer skal forbedre deres egne sikkerhedsforanstaltninger for at øge privatlivets fred og forhindre uautoriseret adgang til hjemmets
Brugere af ringetelefonkamera skal bruge to-faktor-godkendelse for at beskytte kontiKredit:CC0 Public Domain Brugere af Ring doorbell-sikkerhedskameraer skal forbedre deres egne sikkerhedsforanstaltninger for at øge privatlivets fred og forhindre uautoriseret adgang til hjemmets -
 FNs luftfartsagentur skjulte alvorlige hack:medierDen Montreal-baserede internationale civile luftfartsorganisation blev i november 2016 offer for det mest alvorlige cyberangreb i sin historie, Sagde Radio-Canada Det Montreal-baserede FN-luftfart
FNs luftfartsagentur skjulte alvorlige hack:medierDen Montreal-baserede internationale civile luftfartsorganisation blev i november 2016 offer for det mest alvorlige cyberangreb i sin historie, Sagde Radio-Canada Det Montreal-baserede FN-luftfart -
 GM-indtjening ramt af Sydkorea-afgiftNedlukninger af amerikanske fabrikker for at forberede nye General Motors-modeller som 2019 Chevrolet Silverado 1500 førte til lavere salg i Nordamerika, men salget i Kina er fortsat stærkt Genera
GM-indtjening ramt af Sydkorea-afgiftNedlukninger af amerikanske fabrikker for at forberede nye General Motors-modeller som 2019 Chevrolet Silverado 1500 førte til lavere salg i Nordamerika, men salget i Kina er fortsat stærkt Genera
- Tørkeramte Cape Town tæller omkostningerne
- Milliardæren Bloomberg lover 15 millioner dollars til FN for klimaændringer
- Hvorfor uafhængige kulturer tænker ens, når det kommer til kategorier:Det er ikke i hjernen
- JILAs nye atomur -design tilbyder pincetstyring
- Variationerne i nedbøren på Nordpolen vil stige kraftigt
- Nyt perovskitmateriale viser tidligt løfte som et alternativ til silicium