


Automatisering af komplekst design af universel controller til hybriddroner
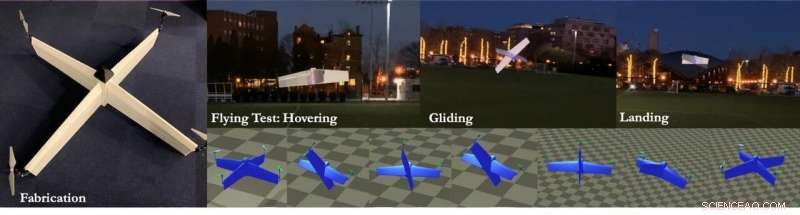
Hybride ubemandede luftfartøjer, eller UAV'er, er droner, der kombinerer fordelene ved multikoptere og fastvingede fly. Disse droner er udstyret til lodret at lette og lande som multikoptere, men har også den stærke aerodynamiske ydeevne og energibesparende egenskaber som traditionelle fly. Mens hybride UAV'er fortsætter med at udvikle sig, imidlertid, fjernstyring af dem er stadig en udfordring. Kredit:Jie Xu
Hybride ubemandede luftfartøjer, eller UAV'er, er droner, der kombinerer fordelene ved multikoptere og fastvingede fly. Disse droner er udstyret til lodret at lette og lande som multikoptere, men har også den stærke aerodynamiske ydeevne og energibesparende egenskaber som traditionelle fly. Mens hybride UAV'er fortsætter med at udvikle sig, imidlertid, fjernstyring af dem er stadig en udfordring.
Et hold fra Massachusetts Institute of Technologys Computer Science and Artificial Intelligence Lab (CSAIL) har udtænkt en ny tilgang til automatisk at designe en tilstandsfri, model-agnostiker, AI-drevet controller til enhver hybrid UAV. Holdet vil præsentere deres nye computerstyringsdesign på SIGGRAPH 2019, afholdt 28. juli-1. august i Los Angeles. Denne årlige samling viser verdens førende fagfolk, akademikere, og kreative sind på forkant med computergrafik og interaktive teknikker.
For at kontrollere hybride UAV'er, et system styrer køretøjets copter-model rotorer til at svæve, og et andet styrer fly-model rotorer for hastighed og distance. Ja, at kontrollere hybrid-UAV'er er udfordrende på grund af kompleksiteten af køretøjets flyvedynamik. Typisk, controllere er designet manuelt og er en tidskrævende proces.
I dette arbejde, holdet behandlede, hvordan man automatisk designer en enkelt controller til de forskellige flytilstande (koptertilstand, glidetilstand, overgang, osv.) og hvordan man generaliserer controllerdesignmetoden for enhver UAV-model, form, eller struktur.
"At designe en controller til et sådant hybriddesign kræver et højt niveau af ekspertise og er arbejdskrævende, " siger Jie Xu fra MIT og medforfatter til forskningen. "Med vores automatiske controller-designmetode, enhver ikke-ekspert kunne indtaste deres nye UAV-model til systemet, vent et par timer med at beregne controlleren, og derefter få deres egne tilpassede UAV'er til at flyve i luften. Denne platform kan gøre hybride UAV'er langt mere tilgængelige for alle."
Forskernes metode består af et neuralt netværksbaseret controllerdesign trænet af forstærkningslæringsteknikker. I deres nye system, brugere designer først geometrien af en hybrid UAV ved at vælge og matche dele fra et medfølgende datasæt. Designet bruges derefter i en realistisk simulator til automatisk at beregne og teste UAV'ens flyveydelse. Forstærkningsindlæringsalgoritme anvendes derefter til automatisk at lære en controller til UAV'en for at opnå den bedste ydeevne i high-fidelity-simuleringen. Holdet validerede deres metode med succes både i simulering og i rigtige flyvetests.
Med den fortsatte udbredelse af hybride UAV'er - i flyindustrien og militærsektorerne, for eksempel – der er et stigende behov for at forenkle og automatisere controllerdesign. I dette arbejde, forskerne havde til formål at levere en ny model-agnostisk metode til at automatisere designet af controllere til køretøjer med vidt forskellige konfigurationer.
I det fremtidige arbejde, holdet har til hensigt at undersøge, hvordan man kan øge manøvredygtigheden gennem forbedret geometridesign (form, positioner af rotorer/vinger), så det kan hjælpe med at perfektionere UAV'ens flyveydelse.
 Varme artikler
Varme artikler
-
 Twitter -direktør Dorsey udløser storm på sociale medier i IndienTwitter CEO Jack Dorsey blev fotograferet i Indien med en plakat, der forargede nogle hinduer Twitter CEO Jack Dorsey er blevet beskyldt for at have tilskyndet had til Indiens højeste kaste efter
Twitter -direktør Dorsey udløser storm på sociale medier i IndienTwitter CEO Jack Dorsey blev fotograferet i Indien med en plakat, der forargede nogle hinduer Twitter CEO Jack Dorsey er blevet beskyldt for at have tilskyndet had til Indiens højeste kaste efter -
 Stødende tysk bilproduktion varsler år med transformationDen tyske bilmaskine spruter Bilproducenter byggede kun 4,7 millioner biler i Tyskland i 2019, branchedata viste mandag, pressede produktionen til sit laveste niveau siden 1997, da handelsspænding
Stødende tysk bilproduktion varsler år med transformationDen tyske bilmaskine spruter Bilproducenter byggede kun 4,7 millioner biler i Tyskland i 2019, branchedata viste mandag, pressede produktionen til sit laveste niveau siden 1997, da handelsspænding -
 Et nyt spin på organiske halvledereHåndskitse af en organisk lateral spin pumpeanordning. Kredit:Deepak Venkateshvaran og Nanda Venugopal Forskere har fundet ud af, at visse organiske halvledende materialer kan transportere spin hu
Et nyt spin på organiske halvledereHåndskitse af en organisk lateral spin pumpeanordning. Kredit:Deepak Venkateshvaran og Nanda Venugopal Forskere har fundet ud af, at visse organiske halvledende materialer kan transportere spin hu -
 Ny ramme gør AI-systemer mere gennemsigtige uden at ofre ydeevnenKredit:CC0 Public Domain Forskere foreslår en ramme for kunstig intelligens (AI), der vil give brugerne mulighed for at forstå rationalet bag AI-beslutninger. Arbejdet er vigtigt, givet push-bevæg
Ny ramme gør AI-systemer mere gennemsigtige uden at ofre ydeevnenKredit:CC0 Public Domain Forskere foreslår en ramme for kunstig intelligens (AI), der vil give brugerne mulighed for at forstå rationalet bag AI-beslutninger. Arbejdet er vigtigt, givet push-bevæg
- Studiet undersøger individers vilje til at bruge kunstig intelligens i karrierevalg
- NASA AI-teknologi kunne fremskynde fejldiagnoseprocessen i rumfartøjer
- Instrumenter, der bruges til at forudsige Weather
- Forud i skyerne:Alibaba planlægger at ændre OL
- Senvinterstorme letter Californiens dyk tilbage i tørken
- Sådan beregnes bindingsordre