


Robotter har brug for en ny filosofi for at få fat
https://www.ncnr.org.uk/
Robotter skal vide, hvorfor de udfører et arbejde, hvis de skal arbejde effektivt og sikkert sammen med mennesker i den nærmeste fremtid. Enkelt sagt, Det betyder, at maskiner skal forstå motivet, som mennesker gør, og ikke bare udføre opgaver blindt, uden sammenhæng.
Ifølge en ny artikel fra National Center for Nuclear Robotics, baseret på University of Birmingham, dette kunne varsle en dybtgående forandring for robotverdenen, men en der er nødvendig.
Hovedforfatter Dr. Valerio Ortenzi, ved University of Birmingham, hævder, at skiftet i tænkning vil være nødvendigt, da økonomier omfavner automatisering, tilslutning og digitalisering ("Industry 4.0') og niveauer af interaktion mellem mennesker og robotter, hvad enten det er på fabrikker eller i boliger, stige dramatisk.
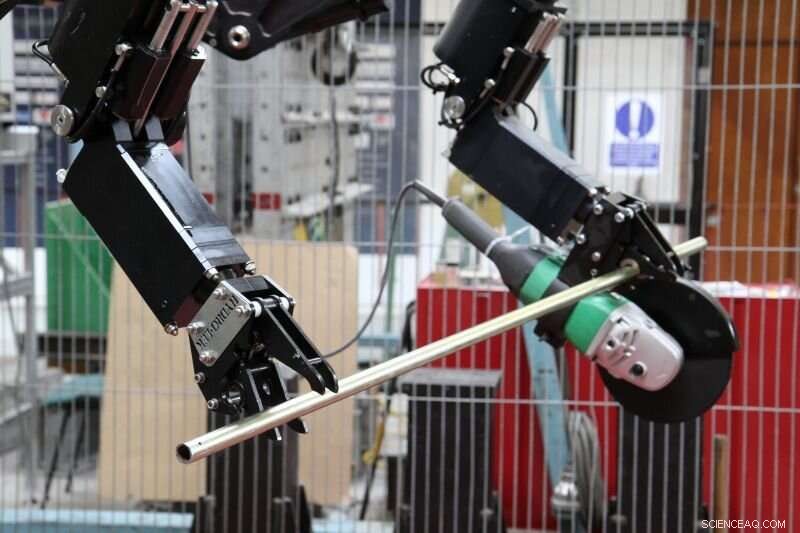
Papiret, udgivet i Nature Machine Intelligence , udforsker spørgsmålet om robotter, der bruger objekter. "Grasping" er en handling, der er perfektioneret for længe siden i naturen, men som repræsenterer banebrydende inden for robotforskning.
De fleste fabriksbaserede maskiner er "dumme, " blindt opfanger velkendte genstande, der dukker op på forudbestemte steder på det helt rigtige tidspunkt. At få en maskine til at opfange ukendte genstande, tilfældigt præsenteret, kræver den sømløse interaktion af flere, komplekse teknologier. Disse omfatter synssystemer og avanceret kunstig intelligens, så maskinen kan se målet og bestemme dets egenskaber (f.eks. er den stiv eller fleksibel?); og potentielt, sensorer i griberen er påkrævet, så robotten ikke utilsigtet knuser en genstand, den har fået besked på at samle op.
Selv når alt dette er gennemført, forskere fra National Center for Nuclear Robotics fremhævede et grundlæggende problem:hvad der traditionelt har tællet som et 'succesfuldt' greb for en robot, kan faktisk være en fiasko i den virkelige verden, fordi maskinen ikke tager højde for, hvad målet er, og hvorfor den samler en genstand op.
Avisen nævner eksemplet med en robot på en fabrik, der henter en genstand til levering til en kunde. Den udfører opgaven med succes, holde pakken sikkert uden at forårsage skade. Desværre, robottens griber skjuler en afgørende stregkode, hvilket betyder, at genstanden ikke kan spores, og at firmaet ikke aner, om varen er blevet afhentet eller ej; hele leveringssystemet går i stykker, fordi robotten ikke kender konsekvenserne af at holde en kasse den forkerte vej.
Dr. Ortenzi giver andre eksempler, involverer robotter, der arbejder sammen med mennesker.
"Forestil dig at bede en robot om at give dig en skruetrækker på et værksted. Baseret på nuværende konventioner er den bedste måde for en robot at samle værktøjet op ved håndtaget, sagde han. Desværre, det kan betyde, at en enormt kraftfuld maskine derefter skubber en potentielt dødelig klinge mod dig, i fart. I stedet, robotten skal vide, hvad slutmålet er, dvs. at videregive skruetrækkeren sikkert til sin menneskelige kollega, for at gentænke sine handlinger.
"Et andet scenarie forestiller sig, at en robot sender et glas vand til en beboer på et plejehjem. Den skal sikre, at den ikke taber glasset, men også at der ikke løber vand ud over modtageren under forbifarten, eller at glasset præsenteres på en sådan måde, at personen kan tage fat i det.
"Det, der er indlysende for mennesker, skal programmeres ind i en maskine, og dette kræver en dybt anderledes tilgang. De traditionelle metrikker, der bruges af forskere, gennem de sidste tyve år, at vurdere robotmanipulation, er ikke tilstrækkelige. I den mest praktiske forstand, robotter har brug for en ny filosofi for at få fat."
Professor Rustam Stolkin, NCNR direktør, sagde, "National Center for Nuclear Robotics er unikt i arbejdet med praktiske problemer med industrien, samtidig med at de genererer den højeste kaliber af banebrydende akademisk forskning - eksemplificeret ved dette skelsættende papir."
 Varme artikler
Varme artikler
-
 Gennemsigtighed og privatliv:Bemyndigelse af mennesker gennem blockchainBlockchain-teknologier kan styrke folk ved at give dem mere kontrol over deres brugerdata. Kredit:Shutterstock Blockchain har allerede bevist sin enorme indflydelse på finansverdenen med sin først
Gennemsigtighed og privatliv:Bemyndigelse af mennesker gennem blockchainBlockchain-teknologier kan styrke folk ved at give dem mere kontrol over deres brugerdata. Kredit:Shutterstock Blockchain har allerede bevist sin enorme indflydelse på finansverdenen med sin først -
 BMW sætter lyskrydsgenkendelse på prøveBMW Group investerer i fremtiden for selvkørende køretøjer. At få folk til at adoptere selvkørende biler vil kræve megen opmærksomhed på, hvordan disse biler kan opføre sig sikkert ikke kun på motorve
BMW sætter lyskrydsgenkendelse på prøveBMW Group investerer i fremtiden for selvkørende køretøjer. At få folk til at adoptere selvkørende biler vil kræve megen opmærksomhed på, hvordan disse biler kan opføre sig sikkert ikke kun på motorve -
 Huawei:Amerikanske kontroller har ingen indflydelse, taler med GooglePå dette foto taget mandag, 20. maj kl. 2019, et barn leger med bobler i nærheden af logoet for tech -giganten Huawei i Beijing. Trump -administrationens sanktioner mod Huawei er begyndt at bide, se
Huawei:Amerikanske kontroller har ingen indflydelse, taler med GooglePå dette foto taget mandag, 20. maj kl. 2019, et barn leger med bobler i nærheden af logoet for tech -giganten Huawei i Beijing. Trump -administrationens sanktioner mod Huawei er begyndt at bide, se -
 Google Assistant skal være nyhedsvært på enhederGoogle Assistant vil være en nyhedsvært til lydhistorier fra mediepartnere fra internetgiganten Google sagde tirsdag, at dens digitale assistent vil fungere som en nyhedsvært på sine tilsluttede en
Google Assistant skal være nyhedsvært på enhederGoogle Assistant vil være en nyhedsvært til lydhistorier fra mediepartnere fra internetgiganten Google sagde tirsdag, at dens digitale assistent vil fungere som en nyhedsvært på sine tilsluttede en