


En evolutionær robottilgang til robotsværmsamarbejde
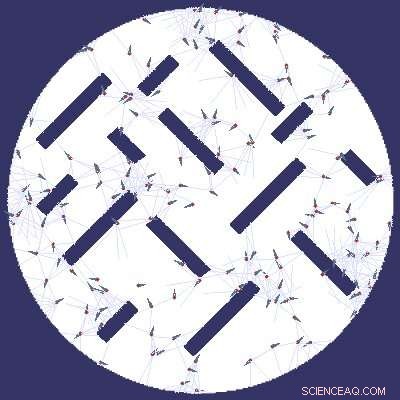
Et af de tre betragtede læringsmiljøer, nemlig bevægelse. I bevægelse, agenter lærer at navigere i omgivelserne og undgå forhindringer (mørke rektangler) og andre agenter. Kredit:Amine Boumaza.
Rekombination, omlejring af genetiske materialer som følge af parring eller kombination af DNA-segmenter fra forskellige organismer har mange evolutionære fordele. For eksempel, det giver organismer mulighed for at fjerne skadelige mutationer fra deres genomer og påtage sig mere nyttige mutationer.
Amine Boumaza, en forsker ved Université de Lorraine, har for nylig forsøgt at anvende denne proces på online legemliggjort evolutionær robotik, et område inden for robotteknologi, der fokuserer på at kopiere evolutionsteorier i robotter. I hans papir, offentliggjort i tidsskriftet GECCO '19 Proceedings of the Genetic and Evolutionary Computation Conference, han udviklede en rekombinationsoperatør inspireret af evolutionen og trænede den i tre opgaver, der kræver samarbejde mellem flere robotter.
"Min forskning falder i det bredere emne AI, og mere specifikt, at forstå, hvordan vi kan designe agenter, der kan lære at udføre interessante opgaver, " sagde Boumaza. "Dette forskningsemne er ikke nyt, men ret gammel, og det har fået meget opmærksomhed på det seneste på grund af de imponerende resultater af dyb læring. I mit tilfælde, Jeg er mere interesseret i sværmrobotik, hvor målet er at få en lang række små robotter til at samarbejde om at løse en opgave og tilpasse sig ændringer i deres omgivelser."
Fascineret af de evolutionære strategier, især rekombination, der bedre ruster levende organismer til at klare livets udfordringer, Boumaza satte sig for at undersøge, om lignende mekanismer kunne anvendes på robotteknologiske tilgange. Hans hypotese var, at hvis det lykkedes at replikere i robotter, rekombination ville øge deres ydeevne og effektivitet.
"Når vi taler om robotagenter, vi antager generelt en fysisk enhed, der er inkorporeret i et miljø (f.eks. en støvsugerrobot i et rum), " sagde Boumaza. "Denne agent opfatter sine omgivelser ved hjælp af et sæt sensorer (forhindringssensorer, kamera, etc.), som kan give den en form for repræsentation af sit miljø. Midlet kan også virke i miljøet ved hjælp af effektorer (motorer, arme, rensebørste, etc.). Disse handlinger er resultaterne af en beregning, der er resultatet af det, vi almindeligvis kalder en controller (dvs. en slags beslutningsprogram)."

Et af de tre betragtede læringsmiljøer, nemlig varesamling. I varesamling, agenter skal indsamle så mange genstande (røde prikker) som muligt. Kredit:Amine Boumaza.
En controller er i bund og grund et program, der behandler de opfattelser, som en robot erhverver via dens sensorer og udsender kommandoer til dens effektorer. I tilfælde af en robotstøvsuger, for eksempel, en registeransvarlig vil behandle oplysninger om sine omgivelser, registrere, om der er støv foran den, derefter producere output, der vil få robotten til at aktivere vakuumet og rykke frem for at støvsuge støvet.
"Tag et skridt videre, vi kan også overveje flere agenter, der kan udvikle sig i det samme miljø, Boumaza sagde. "At designe controllere til hver agent i sådanne indstillinger er et meget vanskeligt problem, som der endnu ikke findes nogen effektiv teknik til. I dette tilfælde, vi kan have få (f.eks. 10 til 100) komplekse robotter, eller mange meget simple robotter (f.eks. hundredvis), der interagerer på måder, der normalt er inspireret af insekters adfærd; det er det, vi kalder sværmrobotik."
Når man udvikler en robot, der effektivt kan udføre en bestemt opgave, forskere skal designe en controller, der er skræddersyet til den specifikke opgave. Hvis det miljø, som robotten er beregnet til at operere i, er enkelt, at designe denne controller kan være ret let, dog de fleste gange, dette er ikke tilfældet.
Dette bliver endnu sværere, hvis ikke umuligt, når man overvejer flere robotter, der interagerer i et givet miljø. Hovedårsagen til dette er, at en menneskelig udvikler umuligt kan forudsige alle de situationer, som hver robot vil støde på, samt de mest effektive tiltag til at tackle hver af disse situationer. Heldigvis, i de seneste år, fremskridt inden for maskinlæring har åbnet interessante nye muligheder for robotforskning, giver udviklere mulighed for at inkorporere værktøjer, der muliggør kontinuerlig læring, i det væsentlige træne controlleren til at håndtere adskillige situationer over tid.
"En måde at designe en controller på på en sådan måde er at bruge evolutionære algoritmer, hvilken, løst sagt, prøv at efterligne den naturlige udvikling af arter for at udvikle robotagent-controllere, " sagde Boumaza. "Det er en iterativ proces, hvor efterhånden som dyr bliver bedre tilpasset deres omgivelser, controlleren bliver bedre til at løse en opgave. Målet er ikke at simulere naturlig evolution, men tag hellere noget inspiration fra det."
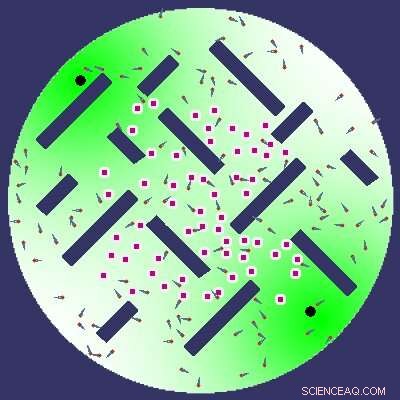
Et af de tre betragtede læringsmiljøer, nemlig fouragering. I fouragering skal agenter samle genstande og bære dem tilbage til boet (en af de to sorte cirkler). Det grønne gulv er et feromonspor, der tilføjer en følelse af retning, den er stærkt koncentreret på redeplaceringerne og mindre koncentreret længere væk. Kredit:Amine Boumaza.
Evolutionær robotteknologi er blot en af de mange teknikker, som forskere kan bruge til at designe robotcontrollere. I de seneste år, imidlertid, evolutionære tilgange har vundet popularitet, med et voksende antal undersøgelser, der sigter mod at replikere evolutionære strategier observeret hos dyr og mennesker.
"Evolutionær robotteknologi har nogle fordele, såsom det faktum, at vi ikke behøver at specificere, hvordan opgaven skal løses (den opdages/læres af algoritmen), men behøver blot at specificere en måde at måle, hvor godt opgaven udføres, " sagde Boumaza. Det har også nogle ulemper, da det er en meget langsom og beregningsintensiv proces, det kan være meget svært at udføre på rigtige robotter. Ud over, disse tilgange er typisk meget følsomme over for præstationsmål, efterhånden som de betinger den adfærd, agenterne har lært."
Boumaza, ligesom andre forskere på området, har forsøgt at udvikle nye tilgange til at overvinde manglerne ved eksisterende evolutionære robotteknologier. I sin nylige undersøgelse, han foreslog specifikt brugen af en ny "parringsoperator" inspireret af rekombination, som kan forbedre konvergenshastigheden i robotsimuleringer. Dette er en bemærkelsesværdig præstation, da det i sidste ende kan reducere den nødvendige tid til at overføre en tilgang fra simuleringer til rigtige robotter.
Han anvendte sin rekombinationsoperatør til tre kollektive robotopgaver:bevægelse, vareindsamling og vareforsøgning. Han sammenlignede derefter den opnåede ydeevne ved hjælp af en rent mutativ version af hans algoritme med den for forskellige rekombinationsoperatører. Resultaterne indsamlet i hans eksperimenter tyder på, at når den er korrekt designet, rekombinationsstrategier kan faktisk forbedre tilpasningen af en sværm af robotter i alle de opgaver, han overvejede.
I fremtiden, den nye evolutionære robottilgang, han foreslog, kunne bruges til at forbedre ydeevnen og tilpasningsevnen af robotter i opgaver, der kræver samarbejde mellem flere agenter. I mellemtiden, imidlertid, Boumaza planlægger at teste sin algoritme på nye opgaver, for at afgøre, om den forbedring, han observerede i de tre opgaver, han fokuserede på, stadig holder.
"Det ville også være interessant at tjekke, om min tilgang kan implementeres på rigtige robotter, " sagde Boumaza. "Teoretisk set forhindrer intet det, bortset fra at have et stort antal fysiske robotter og acceptere at håndtere 'virkelighedskløften' (dvs. det, vi ser i simulering, er normalt ikke, hvad der ville ske i virkeligheden, på grund af simuleringsforenklingerne. Sværmrobotik handler om tal, og en enkelt robots fejl bør ikke hindre sværmen. Ultimativt, derfor, for at fastslå gyldigheden af denne tilgang, skal den testes i virkeligheden, på fysiske robotter."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 GM skruer op for den autonome bilenhed, og sovende aktier flyverI denne 20. juli, 2017, fil foto, SoftBank Group Corp. administrerende direktør Masayoshi Son, venstre, taler under en SoftBank World-præsentation på et hotel i Tokyo. SoftBank vil bruge 2,25 milliard
GM skruer op for den autonome bilenhed, og sovende aktier flyverI denne 20. juli, 2017, fil foto, SoftBank Group Corp. administrerende direktør Masayoshi Son, venstre, taler under en SoftBank World-præsentation på et hotel i Tokyo. SoftBank vil bruge 2,25 milliard -
 Goldman Sachs trækker sig tilbage på bitcoin-handelsplaner:rapportNogle finansielle institutioner trækker sig tilbage fra planer om at komme ind i bitcoin-handel midt i et kraftigt fald i værdi Den internationale bankgigant Goldman Sachs har trukket sig tilbage
Goldman Sachs trækker sig tilbage på bitcoin-handelsplaner:rapportNogle finansielle institutioner trækker sig tilbage fra planer om at komme ind i bitcoin-handel midt i et kraftigt fald i værdi Den internationale bankgigant Goldman Sachs har trukket sig tilbage -
 Smarte enheder kan snart bruge deres ejere som en batterikildeKredit:CC0 Public Domain I en undersøgelse offentliggjort af Avancerede energimaterialer tidsskrift, forskere fra Surreys Advanced Technology Institute (ATI) beskriver en innovativ løsning til a
Smarte enheder kan snart bruge deres ejere som en batterikildeKredit:CC0 Public Domain I en undersøgelse offentliggjort af Avancerede energimaterialer tidsskrift, forskere fra Surreys Advanced Technology Institute (ATI) beskriver en innovativ løsning til a -
 Afstemning finder, at kvinder er mere bekymrede for at miste job til handel og offshoring end kunsti…Kredit:CC0 Public Domain Så mange som 160 millioner kvinder rundt om i verden kan miste deres job i løbet af det næste årti på grund af virkningen af automatisering, og en nylig undersøgelse fra
Afstemning finder, at kvinder er mere bekymrede for at miste job til handel og offshoring end kunsti…Kredit:CC0 Public Domain Så mange som 160 millioner kvinder rundt om i verden kan miste deres job i løbet af det næste årti på grund af virkningen af automatisering, og en nylig undersøgelse fra
- NASA undersøger strukturen af orkanen Deltas tidligt om morgenen
- Fordelene ved seriefortynding
- Bio-inspireret belægning modstår væsker
- Evapotranspiration i et tørt miljø
- Hvordan gamification kunne revolutionere kreativ tænkning på arbejdspladsen
- NASA-bygget instrument vil hjælpe med at lokalisere drivhusgas-superemittere