


En ramme for dybdeestimering og relativ lokalisering i jordrobotter
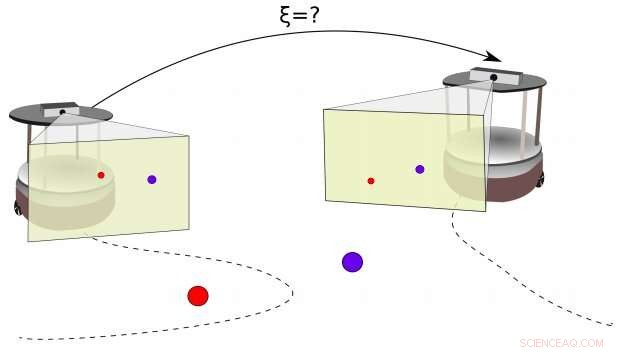
En repræsentation af problemet behandlet i den nylige undersøgelse. To robotter observerer et par 3D -punkter. Forskerne foreslår en pipeline til samtidig at estimere 3D -dybden af de to 3D -punkter og samtidig opnå deres relative positur. Kredit:Rodrigues et al.
Forskere ved University of Porto i Portugal og KTH Royal Institute of Technology i Sverige har for nylig udviklet en ramme, der kan estimere dybden og den relative pose af to jordrobotter, der samarbejder om en given opgave. Deres rammer, skitseret i et papir, der på forhånd blev offentliggjort på arXiv, kunne bidrage til at forbedre ydeevnen for flere robotter i opgaver, der involverer efterforskning, manipulation, dækning, prøveudtagning og patruljering, samt i eftersøgnings- og redningsmissioner.
I de seneste år, forskere har udført et stigende antal undersøgelser, der har til formål at udvikle løsninger til effektivt at koordinere flere robotter inden for en decentraliseret arkitektur. For effektivt at løse en given opgave som en gruppe, individuelle robotter inden for en sværm eller formation bør i det mindste delvist være opmærksom på posen fra andre agenter i deres omgivelser.
Disse poserelaterede data, kendt som relativ pose -information, giver en agent mulighed for at optimere funktionen af et givet mål, omplanlægge sine baner og undgå kollisioner med andre robotter. I nogle virkelige indstillinger, imidlertid, det kan være svært for agenter at opnå nøjagtige estimater for relativ stilling. For eksempel, under ekstreme missioner i fjerntliggende eller afsondrede områder, robotter kan støde på problemer med kommunikationskanaler og med højpræcisionspositionerings- eller motion capture-systemer.
Med det i tankerne, forskergruppen fra University of Porto og KTH satte sig for at udvikle en ramme, der kunne forbedre 3D-dybdeestimering og relativ pose-estimering af jordrobotter, der arbejder sammen mod et fælles mål. De fokuserede specifikt på et scenario, hvor to autonome terrængående køretøjer navigerer i et ukendt miljø, begge udstyret med perspektivkameraer.
Pipeline af de rammer, forskerne foreslår. Kredit:Rodrigues et al.
"Problemet med dybdeestimering sigter mod at gendanne 3-D-oplysninger om miljøet, "forklarer forskerne i deres papir." Det relative lokaliseringsproblem består i at estimere den relative stilling mellem to robotter, ved at mærke hinandens positur eller dele oplysninger om det opfattede miljø. "
De fleste eksisterende løsninger til dybdeestimering og relativ lokalisering i robotter fungerer ved at analysere et frakoblet sæt data, uden at tage hensyn til den kronologiske hændelsesorden. Den fremgangsmåde, forskerne foreslår, på den anden side, overvejer oplysninger indsamlet af de to robotter individuelt via deres kameraer og kombinerer derefter dette for at beregne den relative pose mellem dem. Dybdeestimeringsoplysninger indsamlet af de to agenter og inputkommandoer indføres til et udvidet Kalman -filter (EKF), som er designet til at behandle disse data og estimere den relative stilling mellem robotterne.
"Mens tidligere løsninger på dette problem overvejer et sæt med to eller flere billeder fra miljøet eller bruger en særlig flådekonfiguration (f.eks. Er robotterne i hinandens synsfelt eller har evnen til at registrere bærende oplysninger om hinandens stillinger), vi foreslår en ramme, der deler et sæt fælles observationer af miljøet i den respektive lokale ramme for hver robot (3D-punktsfunktioner anvendes), "skriver forskerne.
Forskerne evaluerede deres rammer i en række simulerede scenarier, ved hjælp af to jordrobotter kaldet TurtleBots. Deres fund tyder på, at deres tilgang faktisk muliggør effektiv dybdeestimering og relativ lokalisering for to robotter, der samarbejder om en opgave. I deres fremtidige arbejde, forskerne planlægger også at overveje den aktive kontrol af to robotter i det samme scenario udforsket i deres nylige undersøgelse, samt andre aspekter, der er relevante for deres koordinering.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Sikkerhed og forurening øverst på dagsordenen, når Paris Air Show åbnerParis Air Show startede med et markant mindre selvtillykke end i de seneste år, i skyggen af Boeing 737 Max -krisen Luftfartsledere kom ned på Paris Air Show mandag med løfter om at forbedre gen
Sikkerhed og forurening øverst på dagsordenen, når Paris Air Show åbnerParis Air Show startede med et markant mindre selvtillykke end i de seneste år, i skyggen af Boeing 737 Max -krisen Luftfartsledere kom ned på Paris Air Show mandag med løfter om at forbedre gen -
 Ville du spise laboratorieskabt fisk? Denne startup udskærer ny vej i alt-kødindustrienKredit:CC0 Public Domain Det er officielt:alternativt kød er blevet mainstream. Vegetariske kreationer som Impossible Burger - der ser ud og smager som rigtigt kød - er de store hovednavne, med v
Ville du spise laboratorieskabt fisk? Denne startup udskærer ny vej i alt-kødindustrienKredit:CC0 Public Domain Det er officielt:alternativt kød er blevet mainstream. Vegetariske kreationer som Impossible Burger - der ser ud og smager som rigtigt kød - er de store hovednavne, med v -
 Økonomisk pres stiger for at reparere Boeings urolige jetlinerI denne marts 11, 2019, redningsfotobesparere arbejder på stedet for et Ethiopian Airlines flyulykke nær Bishoftu, eller Debre Zeit, syd for Addis Ababa, Etiopien. Efterforskere har fastslået, at et a
Økonomisk pres stiger for at reparere Boeings urolige jetlinerI denne marts 11, 2019, redningsfotobesparere arbejder på stedet for et Ethiopian Airlines flyulykke nær Bishoftu, eller Debre Zeit, syd for Addis Ababa, Etiopien. Efterforskere har fastslået, at et a -
 Netflix hæver priserne for 58 millioner amerikanske abonnenter, efterhånden som omkostningerne sti…I denne 17. juli, 2017, filbillede Netflix-logoet vises på en iPhone i Philadelphia. Netflix meddeler tirsdag d. 15. januar, 2019, at det hæver sine priser i USA med 13 procent til 18 procent, afhængi
Netflix hæver priserne for 58 millioner amerikanske abonnenter, efterhånden som omkostningerne sti…I denne 17. juli, 2017, filbillede Netflix-logoet vises på en iPhone i Philadelphia. Netflix meddeler tirsdag d. 15. januar, 2019, at det hæver sine priser i USA med 13 procent til 18 procent, afhængi
- Typer af blæksprutte
- Computerforskere udvikler et system til at syntetisere realistiske lyde til computeranimation
- Hubble ser dobbelte kvasarer i fusionerende galakser
- Hvordan man beregner Fordamper Sizing
- Londons Gatwick lufthavn solgt til det franske Vinci -konglomerat (opdatering)
- SmallGEOs første flyvning når kredsløb