


Et system til automatisk at detektere og indsamle affald
En demonstration af systemets afstandstilnærmelse. Kredit:Bansal et al.
Adskillige lande verden over står i øjeblikket over for store problemer i forbindelse med affaldsindsamling, især i byområder, på grund af den store mængde affald, der dagligt genereres af befolkningen. Teknologi kan spille en væsentlig rolle i håndteringen af disse spørgsmål, for eksempel, gennem udvikling af mere effektive værktøjer til at samle og indsamle affald.
Med det i tankerne, forskere ved Vishwakarma Government Engineering College i Indien har for nylig skabt et billigt og effektivt system til automatisk opdagelse og indsamling af affald. Deres system, præsenteret i et papir, der er forududgivet på arXiv, bruger kunstig intelligens (AI) algoritmer til at opdage og lokalisere affald i dets omgivelser, henter det derefter med en robotgriber.
"Samtidige metoder har svært ved at håndtere mængden af fast affald, der genereres af den voksende bybefolkning, " skrev forskerne i deres papir. "Vi foreslår et system, der er meget hygiejnisk og billigt, der bruger AI-algoritmer til at detektere affaldet."
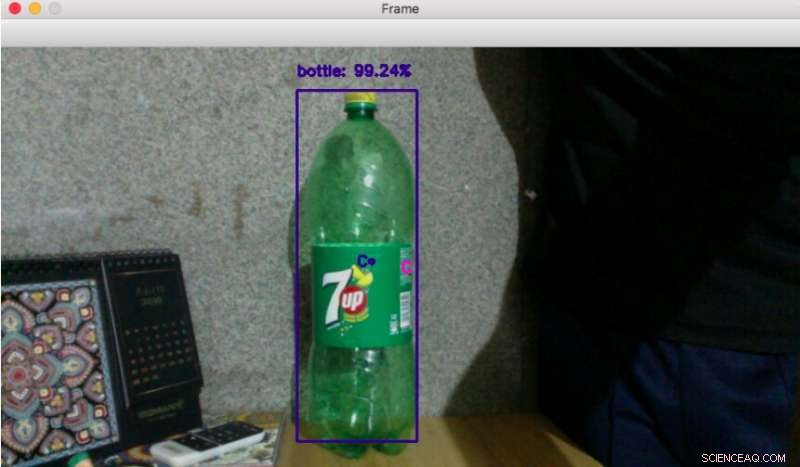
affaldshåndteringssystemet, som forskerne omtaler som AGDC (automatic garbage detection and collection), er sammensat af et robotlegeme (dvs. en base, en robotarm og en skuffe) og flere maskinlæringsalgoritmer. Systemet anvender konvolutionelle neurale netværk (CNN'er) til at opdage affald på jorden og i dets nærhed. Når den opdager et stykke affald, den beregner sin position ved at analysere billeder opsamlet af et integreret kamera.
"Objektdetektion refererer til at identificere forekomster af objekter af en bestemt klasse (såsom flasker, kat, hund eller lastbil) i billeder og videoer i digitalt format, " forklarede forskerne. "AGDC bruger objektdetektion til at klassificere skraldet med resten af objekterne i billedet/videoen. Objektdetekteringsalgoritmen gør det muligt for AGDC at identificere steder i billedet eller videoen, hvor objektet af interesse (dvs. skrald) hviler. "
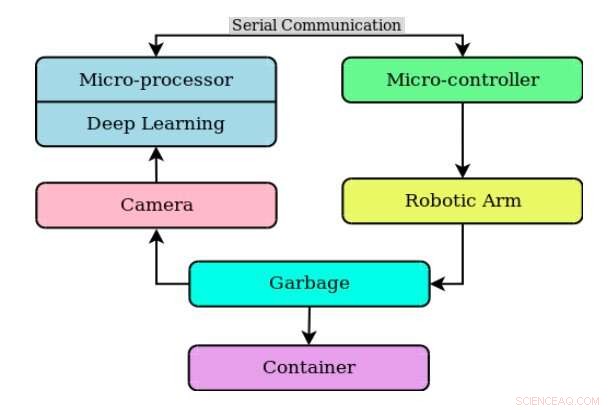
Seriel kommunikationsflow. Kredit:Bansal et al.
Når først systemets CNN'er opdager et stykke affald i dets nærhed, en anden algoritme estimerer afstanden mellem robotten og affaldet, samtidig med at den genererer instruktioner til robotten om at nå målplaceringen. Affaldets position og disse instruktioner føres derefter til en mikrocontroller, som i det væsentlige styrer robottens bevægelser.
"Efter at have fuldført opgaven med objektdetektering, den næste opgave er at identificere objektets afstand fra bunden af robotarmen, som er nødvendigt for at tillade robotarmen at samle affaldet op, " forklarede forskerne.
Når mikrocontrolleren modtager information om, hvor et stykke affald befinder sig, den bevæger robotten mod det sted. Når robotten endelig når skraldet, der er registreret af CNN'erne, den bruger en robotarm til at samle den og taber den i en beholder (dvs. skuffe), der er fastgjort til dens krop.
"Designet af skraldeopsamleren kan opdeles i tre hoveddele:base, robotarm og skuffe, " skrev forskerne. "Basen driver robotten mod skraldet, robotarmen samler affaldet, og skuffen gemmer affaldet, der er indsamlet af robotarmen."
Forskerne har allerede udviklet en prototype af deres affaldsdetektionssystem, som i øjeblikket kan samle op til 100-200g affald. I deres fremtidige arbejde, de planlægger at udvide på denne prototype, så den kan samle to til tre kilo affald, inden den tømmer sin skuffe.
Ud over, teamet overvejer at udvikle og træne en ny CNN -model, der gør det muligt for AGDC at opdage flere affaldsstykker samtidigt. Til sidst, at forbinde robotten til internettet kan også muliggøre bredere implementeringer, for eksempel, skabe et automatiseret netværk af systemer, der samarbejder om effektivt at indsamle affald på bestemte områder.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 En robot med et fast, men blidt grebEn robotgreb udviklet i laboratoriet ved University of Buffalo -ingeniøren Ehsan Esfahani bruger frastødning mellem magneter til at justere stivheden i dens greb, forbedring af sikkerheden. Kredit:Dou
En robot med et fast, men blidt grebEn robotgreb udviklet i laboratoriet ved University of Buffalo -ingeniøren Ehsan Esfahani bruger frastødning mellem magneter til at justere stivheden i dens greb, forbedring af sikkerheden. Kredit:Dou -
 Zuckerberg ser positiv kraft af Facebook på trods af ildstormFacebook CEO Mark Zuckerberg, skriver på 15-årsdagen for grundlæggelsen af det sociale netværk, sagde, at han tror, det vil være en positiv kraft for samfundet Mark Zuckerberg sagde mandag, at
Zuckerberg ser positiv kraft af Facebook på trods af ildstormFacebook CEO Mark Zuckerberg, skriver på 15-årsdagen for grundlæggelsen af det sociale netværk, sagde, at han tror, det vil være en positiv kraft for samfundet Mark Zuckerberg sagde mandag, at -
 Facebook afslører særlige aftaler om datadeling til KongressenKredit:CC0 Public Domain Facebook delte brugeroplysninger med snesevis af hardware- og softwareproducenter, samt applikationsudviklere, godt efter at den sagde, at den afskar eksterne virksomheder
Facebook afslører særlige aftaler om datadeling til KongressenKredit:CC0 Public Domain Facebook delte brugeroplysninger med snesevis af hardware- og softwareproducenter, samt applikationsudviklere, godt efter at den sagde, at den afskar eksterne virksomheder -
 Norman, når kunstig intelligens bliver psykopatForskere ved MIT har skabt Norman, den første psykopatiske kunstige intelligens til at forklare, hvordan algoritmer er lavet, og for at gøre folk opmærksomme på AIs potentielle farer Ingen, det er
Norman, når kunstig intelligens bliver psykopatForskere ved MIT har skabt Norman, den første psykopatiske kunstige intelligens til at forklare, hvordan algoritmer er lavet, og for at gøre folk opmærksomme på AIs potentielle farer Ingen, det er
- Dine politiske holdninger kan forudsige, hvordan du udtaler bestemte ord
- Fossilt brændstofforurening forårsager én ud af fem dødsfald globalt:undersøgelse
- Sådan får du din GPA Score
- Elon Musk:Teslas næste softwareopdatering med klassiske Atari-spil indbygget
- Tilpasning af termoelektrisk spænding over atomskala guldkryds ved mekanisk kraft
- Trappist-1 exoplaneter kan have for meget vand til at understøtte liv